
Особенности рабочих процессов землеройно-транспортных машин (ЗТМ) затрудняют полную автоматизацию их управления без участия машиниста, в связи с чем в настоящее время автоматизированы те операции и рабочие движения этих машин, которые в наибольшей мере определяют производительность труда и эффективность их использования. В системах автоматического управления (САУ) ЗТМ обычно используют дискретные электронные системы на основе полупроводниковых элементов, обеспечивающих надежность работы системы за счет применения бесконтактных элементов. Они имеют сравнительно большой срок службы, малые габаритные размеры, потребляют небольшое количество энергии, работают от простых источников питания. САУ внедрены лишь на части отечественных ЗТМ выпусков последних лет. Значительная часть ЗТМ не имеет такого управления.
В системах автоматического управления ЗТМ решаются задачи стабилизации углового положения ковша или отвала в продольном
(относительно продольной оси машины) и поперечном направлениях, а также высотного положения режущей кромки рабочего органа. Кроме того, решается задача автоматической защиты двигателя от перегрузок.
Как прошивать телефоны и планшеты на процессоре Spreadtrum с помощью программы Research Download
Стабилизация углового положения рабочего органа в продольном направлении осуществляется за счет использования маятниковых датчиков — преобразователей углового положения (см. рис. 6.8, а), устанавливаемых на продольно расположенных элементах рабочего органа (4 и 5 — рис. 16.10 и 5— рис. 16.11).
Система автоматического управления «Стабилоплан-10» состоит из преобразователя углового положения 5 (рис. 16.10), пульта управления 2, аккумуляторной батареи 3, блока управления 1 и гидрораспределителя 4 с электрогидравлическим управлением. При отклонении ковша от заданного положения относительно горизонта маятник преобразователя подает электрический сигнал на блок управления, который после обработки последнего выдает команду электромагнитам гидрораспределителя гидравлической системы скрепера, управляющего гидроцилиндрами подъема и опускания ковша. При опускании ковша в процессе движения скрепера по неровной поверхности гидрораспределитель направляет рабочую жидкость в штоковые полости гидроцилиндров на подъем ковша, а при его подъеме — в их поршневые полости на опускание ковша.
Система стабилизации отвала бульдозера, являющаяся частью САУ «Комбиплан-ЮЛ» (рис. 16.11), работает в описанном выше режиме. Так же работает САУ поперечной стабилизации углового положения отвала с преобразователем 6.
Автоматические системы с маятниковыми преобразователями стабилизируют объект управления только по одному параметру. В описанном случае — по углу отклонения от заданного положения. Если по каким-либо причинам ковш оказался на отличном от первоначального уровне, то дальнейшая стабилизация будет осуществляться относительно этого нового уровня. Таким образом, рассматриваемая автоматическая система не гарантирует стабилизации по заданному уровню. Этого недостатка лишены копирные системы.
ЧТО ЕСТ ЛЕНА? ОТВЕТЫ В КЛУБЕ ЗТМ.

Рис. 16.10. Схема размещения приборов системы «Стабилоплан-10» на скрепере:
1 — блок управления; 2 — пульт управления; 3 — аккумуляторная батарея; 4 — гидрораспределитель; 5 — преобразователь углового положения
Рис. 16.11. Схема размещения приборов САУ отвалом бульдозера
Так, в САУ отвала бульдозера «Комбиплан-ЮЛ» подсистемы продольной и поперечной стабилизации рабочего органа работают в автономном режиме, на который САУ переключается с пульта управления 1. При работе же в копирном режиме лазерный луч, исходящий из излучателя 9, питаемого от аккумуляторной батареи 11 и установленного на треноге 10 на расстоянии 5. 500 м, воспринимается фотоприемным устройством 8 на штанге 7, закрепленной на отвале бульдозера. При смещении отвала по высоте, а вместе с ним и фотоприемного устройства на электромагниты гидрораспределителей 3 подается соответствующая команда, и гидроцилиндры перемещают отвал до восстановления заданного уровня. На базе одного лазерного излучателя могут работать несколько бульдозеров (до 10), оборудованных системой «Комбиплан-ЮЛ».
Так же работает САУ ковша скрепера «Копир-стабилоплан-10», состоящая из описанной выше системы «Стабилоплан-10» и ко-пирного устройства.
Для управления отвалом автогрейдера применяют САУ «Профиль-1» и «Профиль-2» и заменяющие их системы второго поколения «Профиль-10» и «Профиль-20». САУ «Профиль-1» и «Профиль-10» стабилизируют поперечные уклоны отвала, а САУ «Профиль-2» и «Профиль-20», кроме того — его продольные уклоны. При работе автогрейдера в автоматическом режиме с использованием САУ «Профиль-10» выходной сигнал датчика 6 (рис. 16.12), соответствующий поперечному положению отвала 7, сравнивается в полупроводниковом сравнивающем устройстве блока управления / с сигналом задатчика. При рассогласовании сигналов, превышающем зону нечувствительности системы, усилитель включает золотник 2, который соединяет напорную и сливную магистрали гидросистемы с соответствующими полостями управляемого гидроцилиндра 4.

2 3
Рис. 16.12. Блок-схема САУ «Профиль-10»:
/ — блок управления; 2 — электрогидрозолотник с гидроблоком; 3 — гидролинии; 4 — управляемый гидроцилиндр; 5— рама автогрейдера; 6 — датчик; 7— отвал; 8 —
САУ «Профиль-20» включает в себя два канала управления — стабилизации углового положения отвала в поперечном направлении и его высотного положения относительно копира. Датчик поперечной стабилизации устанавливают на поперечной балке тяговой рамы, а щуповый датчик — на одном конце отвала. Сигнал датчика при отклонении отвала от заданного уровня по высоте преобразуется в команду управления аналогично описанному выше.
В последнее время некоторые модели автогрейдеров оборудуют САУ «Профиль-30», включающей в себя подсистему «Профиль-20», дополнительно оборудованную подсистемой стабилизации заданного курса движения автогрейдера путем воздействия на рулевое колесо.
В рассматриваемые САУ включены также подсистемы, обеспечивающие защиту двигателя от перегрузки за счет снижения частоты вращения коленчатого вала. Для этого служит блок 2 (см. рис. 16.11), который в указанном режиме работы двигателя подает электрический сигнал на заглубление ковша, снижая тем самым его нагрузку.
Контрольные вопросы
1. Для чего предназначены землеройно-транспортные машины? Ка
кими рабочими органами они оборудованы? Каковы особенности рабо
чих процессов землеройно-транспортных машин?
2. Для чего предназначены скреперы? Из каких операций состоит их
рабочий цикл? Какова дальность транспортировки грунта этими маши
нами? Назовите главный параметр скрепера. Приведите классификацию
этих машин.
3. Как устроен и как работает самоходный скрепер? Перечислите спо
собы разгрузки скреперных ковшей. Какими способами разрабатывают
грунт скреперами? Охарактеризуйте способы эффективной загрузки ков-
шей. Какие уклоны могут преодолевать скреперы в режиме транспортировки грунта?
4. Как определяют техническую и эксплуатационную производитель
ность скрепера?
5. Для чего предназначены бульдозеры? Какие виды работ они могут
выполнять? Приведите классификацию бульдозеров.
6. Как устроен и как работает бульдозер с неповоротным в плане от
валом? Какими способами разрабатывают грунт бульдозером? Для чего в
качестве одного из рабочих органов бульдозера-рыхлителя используют
рыхлительное оборудование? Какими сменными рабочими органами
оборудуют бульдозеры?
7. Какими мерами снижают потери грунта при его транспортирова
нии бульдозерами?
8. Как определяют техническую производительность бульдозеров, по
слойно разрабатывающих грунт?
9. Как устроен и как работает бульдозер с поворотным в плане отва
лом? Как определяют техническую производительность бульдозера, за
нятого на планировке земляных поверхностей? При каких условиях чел
ночная схема работы бульдозера производительней работы с разворота
ми на концах захватки?
10. Для чего предназначены автогрейдеры? Какие виды работ они могут
выполнять? Приведите классификацию автогрейдеров. Какова структура
колесной формулы этих машин? Автогрейдеры с какой колесной фор
мулой наиболее всего распространены в строительстве?
11. Как устроен и как работает автогрейдер? Охарактеризуйте возмож
ные установочные положения отвала автогрейдера. Для чего передние
колеса имеют возможность наклоняться в вертикальной плоскости? Чем
обеспечивается опирание всех колес машины на поверхность передви
жения? Каким образом обеспечиваются лучшие планировочные каче
ства автогрейдеров по сравнению с бульдозерами, работающими в ре
жиме планировки земляных поверхностей? Назовите технологические
схемы движения автофейдеров. При каких условиях они реализуются?
12. Какие задачи решаются благодаря использованию автоматических
систем управления землеройно-транспортными машинами? Приведите
структурные схемы этих систем и объясните принцип их работы.
Источник: poisk-ru.ru
Зеркально-теневой метод. Способы реализации ЗТМ. Предельная и условная чуствительность
Метод –это правило использования средств контроля по признаку характер взаимодействия поля с объектом контроля. ЗТМ относят к комбинированным методам:
— мы анализируем прошедшую сквозь толщину объекта волну (методы прохождения)
— анализируем отраженную от донной поверхности (методы отражения).
Признак обнаружения дефекта –изменение амплитуды донного сигнала в заданное наперед число раз.
Вне зависимости от способа реализации ЗТМ существуют требования к объекту контроля:
— плоскопараллельность поверхности (катания, донной)
— наличие акустического контакта.
Способы реализации ЗТМ.
1). По первому донному продольными волнами. Анализируется амплитуда донного сигнала прошедшего и отраженного один раз сквозь изделие. Реализуется с помощью ПЭП, работающего в совмещенном (a=0) или раздельно-совмещенном (РС a=0) режиме.
2). По второму донному продольными волнами. Исследуется амплитуда второго донного сигнала ( 2 раза прошедшего сквозь изделие). Реализуется теми же ПЭП.
9). Наклонный ввод продольными волнами. Используется 2 наклонных ПЭП с b, расположенными на расстоянии В:  =tg a. В=tg a*Н*2. Анализируется амплитуда сигнала, пришедшего на ПЭП, работающего в режиме приема.
=tg a. В=tg a*Н*2. Анализируется амплитуда сигнала, пришедшего на ПЭП, работающего в режиме приема.
10). Наклонный ПЭП поперечными волнами b
-контроль за качеством акуст. контакта
-возможность выявления вертикальных расслоений с малым раскрытием
-невозможно определить глубину залегания дефекта
-высокие требования к качеству акустич контакта
-лучшая чувствительность к дефектам
(сигнал через дефект проходит 2 раза)
-возможность выявления вертикальных расслоений с малым раскрытием
-невозможно определить глубину залегания дефекта
-высокие требования к качеству акустич контакта
-осуществляется контроль за акуст контактом .при этом стояниеотражающей поверхности менее критично для его обеспечения
-возможность определения глубины залегания дефекта
-возможность выявления вертикальных расслоений с малым раскрытием
-менее чувствителен к дефектам, чем 1 и 2 способы
-высокие требования к плоскопараллельности поверхности.
-осуществляется контроль за акуст контактом .при этом стояниеотражающей поверхности менее критично для его обеспечения
-возможность определения глубины залегания дефекта
-менее чувствителен к дефектам, чем 1 и 2 способы
-высокие требования к плоскопараллельности поверхности
-нет возможности выявления вертикальных расслоений
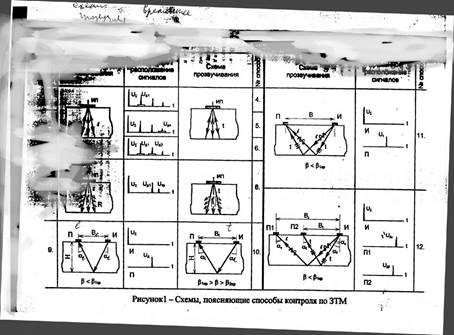
Так же существуют следующие способы реализации ЗТМ.
— по 1 и 2 донному поперечными волнами (рис.4,5), ЭМАП
— по соотношению 1 и 2 донных для продольных и поперечных волн.(рис 3,6)
— использование волн дифракции (рис 7.8)
— использование трансформации волн при наклонном вводе колебании (рис.11.12)
Измеряемые характеристики.
Коэффициент выявляемости
 |
 |
 |
 |
По первому донному. Вводим коэффициент ослабления К =
=
Чем больше дефект, тем меньше К . если К =1 то либо дефекта нет либо дефект не перекрывает пучок.

К=0, дефект перекрыл луч полностью.
К= =N
=N -N
-N ;
;
По второму донному. Это отношение амплитуды второго донного по отношению ко второму донному на бездефектном участке:
К =
=
Таким образом: К=К=N -N
-N
Условная протяженность
Условная протяженность –это расстояние между двумя крайними положениями преобразователя, при которых донныйсигнал в 2 раза выше (на 6 дБ), чем максимально ослабленный дефектом донный сигнал.
-находим положение ПЭП, при котором дефект максимально ослабляет сигнал
-доводим сигналдо стандартного (порогового) уровня
-уменьшаем этот сигнал на 6 дБ
-находим крайнее положение, при которым сигнол достигает стандартного уровня.
Предельная и условная чуствительность.
Для ЗТМ предельная чувствительность определяется минимальным ослаблением, при котором еще определяется дефект
Для первого донного равна условной чувствительности: К =К
=К ;
;
Для второго донного: К=
К =
= =0,2.
=0,2.
Для рельсовой дефектоскопии для ЗТМ принята стандартная условная чувствительность- 14 дБ.
При ЗТМ для настройки вместо СО используется рельс.
Помехи при ЗТМ.
1). Ослабление акустического сигнала: К =
= =0,3 –0,7: 2). Структурные шумы К
=0,3 –0,7: 2). Структурные шумы К =
=
3). Непараллельность поверхностей К =
=  4). Нарушение донной поверхности К
4). Нарушение донной поверхности К =
=
5). Смещение искат системы отн оси рельса К =
=  6).Локальное изменение толщ изделия К
6).Локальное изменение толщ изделия К =
=
7). Разворот одного из накл преобразов К =
=
Суммарная помеха в разах перемножается К  = К*К*К*…..
= К*К*К*…..
а в дБ суммируется К = К+К+К+…..
Похожие материалы
- Отчет по лабораторной работе №1 Бипризма Френеля
- Дифракция плоских волн, отчет по лабораторной работе №4
- Однократная продольная несимметрия. Правило эквивалентности прямой последовательности
Источник: vunivere.ru
Зтм программа для чего

Многие люди делятся .ztm файлы, не прилагая инструкции по использованию. Однако не для всех очевидно, кто программирует .ztm файл можно редактировать, конвертировать или распечатывать с помощью. На этой странице мы стараемся оказать помощь в обработке .ztm файлы.
В нашей базе данных найдено 1 расширение (а) имени файла.
- ZTreeWin макрос
- Проблемы, связанные с файлом .ztm
.ztm — макрос ZTreeWin
В ZTM файлы данных относятся к ZTreeWin. ZTM Файл представляет собой макрос ZTreeWin. ZTreeWin — это быстрый и гибкий менеджер файлов / каталогов в текстовом режиме для всех версий Windows.
Заявка: ZTreeWin Категория: Дата файлы Мим-тип: приложение / октет-поток Магия: — / — Псевдонимы: — ZTreeWin Macro связанные расширения: .zam ZTreeWin Данные меню приложения ZTreeWin .zlog Журнал ZTreeWin
Естественно, что другие приложения также могут использовать .ztm расширение файла. Даже вредоносные программы могут создавать .ztm файлы. Будьте особенно осторожны с .ztm файлы поступают из неизвестного источника!
Не удается открыть файл .ztm?
Если дважды щелкнуть файл, чтобы открыть его, Windows проверяет расширение имени файла. Если Windows распознает расширение имени файла, она открывает файл в программе, связанной с этим расширением имени файла. Когда Windows не распознает расширение имени файла, вы получаете следующее сообщение:
Windows не может открыть этот файл:
Чтобы открыть этот файл, Windows должна знать, какую программу вы хотите использовать для его открытия. Windows может автоматически подключиться к Интернету, чтобы найти его, или вы можете вручную выбрать его из списка программ, установленных на вашем компьютере.
Чтобы избежать этой ошибки, вам необходимо правильно настроить ассоциацию файлов.
- Откройте Панель управления> Панель управления Главная> Программы по умолчанию> Установить связи.
- Выберите тип файла в списке и нажмите «Изменить программу».
Расширение файла .ztm часто дается неправильно!
Согласно поисковым запросам на нашем сайте, эти орфографические ошибки были самыми распространенными за последний год:
банкомат, stm, тм, xtm, zgm, zm, zmt, zt, zth, ztk, ztl, ztn
Возможно ли, что расширение имени файла написано неправильно?
Подобные расширения файлов в нашей базе данных:
.zm ZSNES Фильм .xtm Данные XtremSplit .ztl ZBrush ZTool Файл .atm Макрос параметров станка Alphacam .stm Файл Nanoeducator .zt Карта теней ментального луча
Операционные системы
DataTypes.net в настоящее время поддерживает следующие операционные системы:
Windows XP / Vista, Windows 7/8, Windows 10, CentOS, Debian GNU / Linux, Ubuntu Linux, FreeBSD, Mac OS X, iOS, Android
Если вы найдете информацию на этой странице полезной, пожалуйста, дайте ссылку на эту страницу.
Если у вас есть полезная информация о .ztm формат файла, напишите нам!
Пожалуйста, помогите нам, оценив эту страницу ниже.
Источник: ru.scriptcult.com