
Здесь можно изучать кинематику движения. Вы можете самостоятельно сконструировать ваш механизм, добавить новые узлы, стержни, отключать гравитацию, устанавливать перо, которое будет рисовать траекторию узла. Стержни можно растягивать и сжимать. Инструкцию смотрите внизу.
— Левая кнопка мышки: перемещение точки (узла, стержня, связи и т.п.)
— Нажмите ctrl для входа/выхода из редактирования режима.
— Клавиша «G» — включить/выключить гравитацию.
— Клавиша «R» — удалить трассировку.
В режиме редактирования:
— Клик левой кнопкой мышки — добавить точку.
— Клик правой кнопкой мышки — удалить точку.
— Выберите любые две точки, чтобы соединить их.
— Нажмите shift, чтобы отменить выделение.
— Нажмите «F» и выберите точку, чтобы зафиксировать/освободить ее.
— Нажмите «P» и выберите точку для установки/удаления пера для траектории.
— Новая точка свяжется с последней по умолчанию.
Машины и механизмы. Часть 2. Кинематические схемы.
Источник: primat.org
Моделирование кинематики — это не сложно
Мне давно хочется заняться созданием роботов, но всегда не хватает свободных денег, времени или места. По этому я собрался писать их виртуальные модели!
Мощные инструменты, позволяющие это делать, либо сложно стыкуются со сторонними программами (Modelica), либо проприетарны (Wolfram Mathematica, различные САПР), и я решил делать велосипед на Julia. Потом все наработки можно будет состыковать с сервисами ROS.
Будем считать, что наши роботы двигаются достаточно медленно и их механика находится в состоянии с наименьшей энергией, при ограничениях, заданных конструкцией и сервоприводами. Таким образом нам достаточно решить задачу оптимизации в ограничениях, для чего понадобятся пакеты «JuMP» (для нелинейной оптимизации ему понадобится пакет «Ipopt», который не указан в зависимостях (вместо него можно использовать проприетарные библиотеки, но я хочу ограничится свободными) и должен быть установлен отдельно). Решать дифференциальные уравнения, как в Modelica, мы не будем, хотя для этого есть достаточно развитые пакеты, например «DASSL».
Управлять системой мы будем используя реактивное программирование (библиотеку «Reactive»). Рисовать в «блокноте» (Jupyter), для чего потребуются «IJulia», «Interact» и «Compose». Для удобства еще понадобится «MacroTools».
Для инсталляции пакетов надо выполнить в Julia REPL команду
foreach(Pkg.add, [«IJulia», «Ipopt», «Interact», «Reactive», «JuMP», «Compose», «MacroTools»])
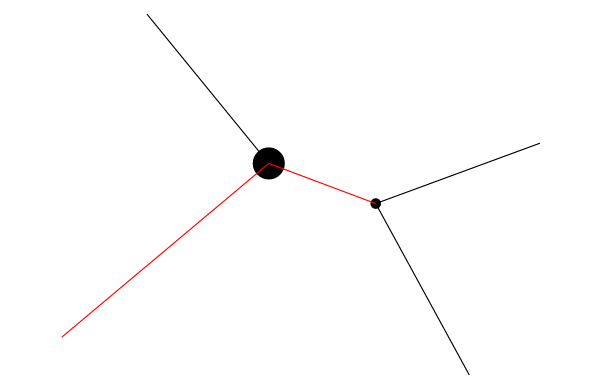
Рассмотрим простую двумерную систему, схематически изображенную на рисунке.
Что такое КИНЕМАТИЧЕСКАЯ СХЕМА станка?
Красными линиями там обозначены пружины, черными — нерастяжимые веревки, маленький кружечек — невесомый блок, большой — груз. У веревок есть длина, у пружины — длина и жесткость. Переменные координаты назовем:
(x,y) — координаты груза (большого круга)
(xctl, yctl) — координаты «управляющего конца» веревки, длиной 1.7 привязанной к грузу.
(xp, yp) — координаты невесомого точечного блока, способного скользить по веревке.
Одна пружина длины 0.1 и жесткости 1 закреплена в точке (0,3) и прицеплена к грузу. Вторая пружина длиной 0.15 и жесткостью 5 соединяет груз и блок, который скользит по веревке длиной 6 закрепленной в точках (5,1) и (4.5,5).
(параметры подбирались эволюционно, что бы мне было наглядно и понятно как она себя ведет при добавлении новых фич)
полный код функции, решающей уравнение
Макрос wire задает ограничение «связывание нерастяжимой веревкой» заданной длины два объекта или два объекта и блок.
Макрос energy описывает минимизируемую функцию энергии — специальный терм w описывает пружину (с заданной жесткостью и длиной), а 0.4*y — энергия груза в гравитационном поле, слишком простая, что бы для ее придумывать специальный синтаксис.
Эти макросы выражаются через библиотечными NLconstraint и NLobjective (линейные constraint и objective эффективнее, но с нашими функциями не справляются):
Использование в ограничениях «меньше или равно» вместо «равно» означает что веревка может провисать, но не растягиваться. Для двух точек можно использовать строгое равенство, если надо соединить их «жестким стержнем», заменив соответствующий макрос.
код макросов
Теперь опишем элементы управления:
xctl = slider(-2:0.01:5, label=»X Control») xctlsig = signal(xctl) yctl = slider(-1:0.01:0.5, label=»Y Control») yctlsig = signal(yctl)
присоединим их к нашей системе:
ops = map(myModel, xctlsig, yctlsig)
И отобразим это в notebook:
пара вспомогательных функций
xscale = 3 yscale = 3 shift = 1.5 pscale(x,y) = ((x*xscale+shift)cm, (y*yscale)cm) function l(x1,y1, x2,y2; w=0.3mm, color=»black») compose(context(), linewidth(w), stroke(color), line([pscale(x1, y1), pscale(x2, y2)])) end
полный вариант кода
Простой способ запустить notebook: в Julia REPL набрать using IJulia notebook() . Это должно открыть в браузере «http://localhost:8888/tree». Там надо выбрать «new»/«Julia», там в поле ввода скопировать код и нажать Shift-Enter.
- программирование в ограничениях
- реактивное программирование
- constraints
- Julia
- моделирование
- робототехника
- макросы
- Анализ и проектирование систем
- CAD/CAM
- Математика
- Julia
- Разработка робототехники
Источник: habr.com
Новый продукт АСКОН. Кинематический и динамический анализ моделей КОМПАС-3D

Не секрет, что исследование динамики и кинематики многих изделий, таких как машины и механизмы, транспортные средства, роботы, космические аппараты сложной конфигурации, является необходимым и одним из наиболее важных этапов проектирования. Анализ поведения механизмов уже на стадии проектирования существенно сокращает затраты и время при последующих натурных испытаниях.
В настоящее время на рынке САПР данное направление представлено довольно большим числом универсальных программ. Все программы такого типа автоматизируют процесс формирования уравнений движения конкретной механической системы на основе описания инерционных, геометрических, кинематических параметров, моделей силовых взаимодействий, выбранных или заданных пользователем. Для дальнейшего исследования динамики объекта используются численные методы анализа уравнений движения.
По нашему мнению, широкому использованию программ данного типа препятствуют высокие требования, предъявляемые к уровню владения пользователем сложными разделами механики, в частности теоретической, усложненные интерфейс и методики создания динамических моделей, в то время как конструкторам зачастую достаточно провести собственный несложный и быстрый динамический анализ, чтобы принять правильное решение.
Новая библиотека «Универсальный механизм Express», разработанная специалистами АСКОН и Лаборатории вычислительной механики (г.Брянск), призвана повысить эффективность конструкторской работы при проектировании механических изделий в системе КОМПАС-3D.
Библиотека «Универсальный механизм Express» разработана для системы КОМПАС-3D. Она предоставляет пользователю набор инструментов для получения динамического объекта — системы тел — и последующего анализа его динамических, кинематических и статических свойств.
Понимая важность и сложность проблем, связанных с моделированием динамики систем тел, создатели библиотеки преследовали следующие цели:
• упростить процесс создания динамических моделей и их численного анализа, сделав доступным моделирование динамики систем тел широкому кругу инженеров-исследователей и конструкторов;
• максимально приблизить интерфейс программы моделирования динамики систем тел к привычному для конструктора интерфейсу CAD-программ;
• подготовить массового пользователя к работе с более сложными и функционально полными программами.
Библиотека построена на расчетном и интерфейсном ядре основной программы (UM Base — подробнее о ней читайте во врезке), однако в ее структуру и базу силовых элементов внесены доработки, благодаря которым приложение становится незаменимым инструментом конструктора-механика.
Работа с библиотекой включает три основных этапа: создание модели в КОМПАС-3D, создание динамического объекта в библиотеке и собственно анализ модели.
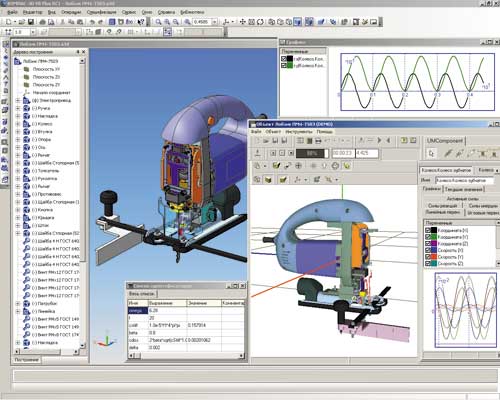
Общий вид на примере анализа механизма лобзика
Создание трехмерной сборки в системе КОМПАС-3D
На данном этапе важно создавать сборки, используя стандартные сопряжения таким образом, чтобы облегчить последующее преобразование сборки механизма в динамическую систему тел. При проектировании в системе КОМПАС-3D важно наложить ровно столько сопряжений, сколько необходимо для работы механизма. Кроме того, если пользователь планирует работать с кулачками, то на данном этапе возможно назначение текстовых атрибутов элементам сборки для их автоматической идентификации библиотекой. Это относится и к точкам связи, которым в последующем планируется назначение шарниров или силовых элементов.
Создание динамического объекта
Автоматически конвертируются графические объекты и читаются инерционные параметры деталей, распознанные группы сопряжений преобразуются в шарниры (поступательные, вращательные и пр.). На данном этапе также осуществляется доработка моделей, включающая преобразование дерева сборки в набор тел путем объединения деталей в тела. Это необходимо для упрощения дальнейших работ по анализу. Например, если в конструкции присутствует большое количество стандартных деталей (болты, гайки, шайбы), то, объединив их с основными деталями, мы существенно упростим расчет, инерционные же параметры останутся неизменными. Библиотека «Универсальный механизм Express» позволяет на основе сборок КОМПАС-3D создавать модели объектов, состоящих из неограниченного числа абсолютно твердых тел.
Следующим шагом данного этапа является доработка кинематической схемы путем визуального добавления шарниров. В библиотеке доступны следующие типы шарниров (кинематических пар):
• поступательный — определяет перемещение деталей в заданном направлении;
• вращательный — при этом осуществляется вращение вокруг одной оси;
• карданный — обеспечивающий вращение двух валов под переменным углом;
• сферический — в данном типе шарнира доступны только повороты во всех направлениях;
• с шестью степенями свободы — разрешено перемещение во всех направлениях.