
ПО Mission Planner является бесплатным, с открытым исходным кодом доступный для Windows. Эти инструкции проведут вас через установку Mission Planner для компьютера.
Загрузите последнюю версию ПО Mission Planner для установки
Скачать последнюю версию Mission Planner
Выберите самую последнюю MSI и выберите Загрузить.
Запустите установку
Откройте файл установщика Microsoft (. MSI) и выберите Выполнить для запуска утилиты установки.
Планировщик Миссия Installation Utility
Следуйте инструкциям установки, утилита автоматически обновит и установит необходимые драйвера. Если вы получаете сообщение об ошибке установки DirectX, пожалуйста, обновите ваш DirectX плагин в центре загрузки.
Если вы получаете предупреждение как на картинке ниже, выберите «Установить программное обеспечение этого драйвера», чтобы продолжить.
Выберите установки драйвера в любом случае.
Mission Planner обычно устанавливается в C: Program Files (x86) APM папка Планировщик или C: папка Планировщик Program Files APM. Там же находятся файлы журнала устаноки. На рабочем столе должен появится значек программы во время установки.
INAV- полет по «точкам», создание миссий и тесты наземки.
Запустите Mission Planner
После завершения установки, запустите Mission Planner, нажав на иконку. Mission Planner автоматически уведомляет вас о доступных обновлениях. Пожалуйста, всегда запускать последнюю версию ПО.
Обновление ПО и проблемы при запуске
Иногда после автоматической загрузки обновления ПО программа может попросту не запуститься, это связано с некоректным обновлением (иногда не по вашей вине) для этого рекомендуем обновлять через скачивание и установку ПО Mission Planner
Скачать последнюю версию Mission Planner
Просьба ссылаться на данный ресурс. 2023.
версия 0.75rc
Мы в социальных сетях:
Источник: ardupilot.su
Использование Geoscan Planner¶
В правом нижнем углу появится пиктограмма антенны и количество подключенных бортов.

Индикатор работы программы MdmDisp ¶
3.1 При первом подключении необходимо настроить соединение с БВС, запустив программу NetTopology:
- Нажмите на значок Поиск новых устройств.

Значок поиска новых устройств ¶
Программа отобразит список обнаруженных модемов.
Эфир сканируется до тех пор, пока кнопка Поиск новых устройств не будет нажата повторно.
- Выберите появившийся Борт №xxx и нажмите на значок Добавить устройство.

ARDUPILOT. Обзор возможностей по созданию миссий
Значок добавления устройства ¶
Программа сохраняет список добавленных устройств.
При проведении повторных полетов достаточно запустить MdmDisp и убедиться, что подключение выполнено успешно.
Если БВС не обнаружен, запустить поиск бортовых модемов, нажав на значок MdmDisp правой кнопкой мыши и выбрав Переподключить.

Контекстное меню MdmDisp ¶
- Запустите программу Geoscan Planner.
- В окне ввода логина и пароля введите свой логин и пароль пользователя продукта.
- Во вкладке Полет выберите Подключить БВС — Поиск….*

- Выбрать тип подключения MdmDisp. Задать IP-адресlocalhost. В списке Борт установить для БВС — Порт 2.

Окно подключения БВС ¶
Параметры достаточно установить один раз. При последующих подключениях БВС воспользуйтесь кнопкой Подключить БВС панели инструментов. Приемник автоматически определит координаты и отобразит местоположение БВС на карте. В окне программы появятся панель телеметрии (слева) и панель приборов (справа).

Проектирование полетного задания¶

Создание нового проекта ¶
Укажите имя проекта, параметры съемки, модель БВС и фотоаппарата.

Создание нового проекта полетного задания ¶
Площадная аэрофотосъемка¶
Площадная аэрофотосъемка – съемка полигонов. Полигон – это область, ограниченная многоугольником. Оператор задает вершины многоугольника (не менее 3), а программа автоматически рассчитывает маршрут обхода.
- Нажмите на значок Создать площадную аэрофотосъемку панели инструментов.

Создание площадной аэрофотосъемки ¶
- Щелчками кнопки мыши задайте на карте угловые точки исследуемого участка местности. Программа автоматически рассчитает маршрут обхода полигона.

Пример построения площадной аэрофотосъемки ¶
Добавление и удаление вершин полигона¶
В готовый полигон можно добавлять вершины.
- С зажатой левой кнопкой мыши переместите среднюю точку стороны полигона.

Вершина будет создана автоматически. В плавающем окне рядом с вершиной отобразятся ее координаты.

Результат добавления вершины ¶
Для удаления вершины:
- нажмите на вершину правой кнопкой мыши;
- в контекстном меню выберите Удалить вершину.

Изменение направления линий облета¶
Необходимость оптимизировать полигон «по направлению» возникает, например, если на месте проведения работ сила и направление ветра неблагоприятны (сильный ветер вдоль линий облета полигона). Для изменения типа оптимизации щелкните правой кнопкой мыши на полигоне и выберите в контекстном меню вариант Оптимизация «направление».

Оптимизация по направлению ¶
Одна из вершин полигона будет подсвечена. На ней появится бегунок для задания направления.

Корректировка направления облета ¶
В результате будет построен новый маршрут облета полигона по заданному направлению.

Новый маршрут облета ¶
Изменение точки входа¶
Если необходимо сменить точку входа в полигон, то выполните следующие действия:
- Выделите полигон.

- Правой кнопкой мыши выделите точку, в которой нужно осуществить вход.
- В появившемся контекстном меню выберите Начать здесь.

Изменение точки входа в полигон ¶

У выбранной точки входа появится флажок
Линейная аэрофотосъемка¶
Команда Создать линейную аэрофотосъемку служит для облета линейных протяженных объектов, таких как: реки, дороги, нефтепроводы и т.п..
- Нажмите на значок Создать линейную аэрофотосъемку панели инструментов.

Создание области линейной аэрофотосъемки ¶
- Однократными щелчками задайте маршрут обхода протяженного объекта по точкам разворотов. Программа автоматически построит линии облета.

Пример линейной аэрофотосъемки ¶
Полет по точкам¶
Команда Создать полет по точкам может использоваться для обследования территорий или облета высотных объектов.
- Нажмите на значок Создать полет по точкам на панели инструментов.

Значок создания полета по точкам ¶
- Однократными щелчками задайте маршрут полета по точкам.

Задание маршрута полета по точкам ¶
По умолчанию фотографирование во время полета по точкам не осуществляется. При необходимости настройте Режим фотографирования в панели Свойства.
- Щелчком правой кнопки мыши по точке вы можете задать время «зависания» БВС. Выберите Задать задержку в точке и укажите время в секундах.
Точка ожидания¶
Команда Создать точку ожидания служит для удержания БВС в точке на высоте заданное время.
- Нажмите на значок Создать точку ожидания на панели инструментов.

Значок создания точки ожидания ¶
- Щелчком мыши на карте задайте точку, в которой должно осуществляться ожидание.

Точка ожидания на карте ¶
БВС будет на заданной высоте «удерживать» точку в течение указанного времени, после чего отправится по запланированному маршруту.
В экспертном режиме (см. полное руководство Geoscan Planner) можно изменить свойства: задать высоту точки ожидания, длительность ожидания, направление движения и активировать функции измерения ветра и бесконечного ожидания.
При активации варианта Измерение ветра. При этом точка ожидания окрасится в желтый цвет, а длительность измениться на 15с. Квадрокоптер, учитывая измеренные данные о ветре, будет плавнее идти по маршруту полетного задания.
Функция бесконечного ожидания служит для постоянного удержания точки (пока не сработает отказ по низкому заряду АКБ, приводящий к автоматическому возврату). При этом цвет точки ожидания изменится на темно-синий.
Рекомендуется устанавливать точку ожидания с измерением ветра перед каждым полетным элементом на высоте полетного элемента. Если элементы полетного задания находятся на значительном удалениии, рекомендуется дополнительно провести измерение ветра рядом с этим полетным элементом.
Комплексы Геоскан не являются сертифицированными приборами измерения ветра, поэтому не могут быть использованы в качестве надежных источников данных о состоянии окружающей среды.
Панорамная съемка¶
Команда Создать панорамную съемку служит для съемки серии фотографий с последующим программным преобразованием в единую панораму.
- Нажмите на значок Создать панорамную съемку на панели инструментов.

Значок создания панорамной съемки ¶
По умолчанию выполняется съемка в полный оборот по азимуту и в пределах от 0 до 80 по наклону. При необходимости пользователь может изменить параметры панорамной съемки во вкладке Свойства режима эксперта (см. полное руководство по Geoscan Planner).
Точка посадки¶
Команда Создать точку посадки служит для указания места приземления БВС.
При отсутствии заданной точки посадки БВС по окончанию полетного задания вернется в точку старта.
- Нажмите на значок Создать точку посадки на панели инструментов.

Значок создания точки посадки ¶
- Щелчком мыши укажите точку приземления БВС.
Предстартовая подготовка¶
- Запустите Мастер предстартовой подготовки.

Запуск мастера предстартовой подготовки ¶
Следуйте указаниям мастера предстартовой подготовки (большинство проверок выполняются автоматически). Задайте время автономного полета (время, в течение которого осуществляется полет независимо от наличия связи между НСУ и БВС) и высоту возврата после выполнения полетного задания или окончания времения автономного полета.
Высота возврата должна быть такой, чтобы гарантировать отсутствие препятствий.
Полет¶

Убедитесь, что ничего не мешает вращению лопастей и подтвердите запуск двигателей.

Подтверждение запуска двигателей ¶
Автопилот проверит работу двигателей. На экране НСУ появится окно подтверждения взлета.

БВС осуществит взлет.
БВС выполняет полет в автоматическом режиме, однако это не освобождает оператора от обязанностей по наблюдению за процессом полета. Постоянное наличие связи по радиолинии не является необходимым для успешного выполнения задания.
Возврат¶
Команда Возврат отправляет борт к стартовой точке. Достигнув положения напротив стартовой точки на высоте, БВС выполняет посадку.

Значок возврата БВС ¶
Посадка¶
Команда Посадка служит для выполнения снижения и немедленной посадки.

Значок посадки БВС ¶
Автоматическое замедление при посадке срабатывает по барометрической высоте. Не рекомендуется указывать точку посадки в месте, сильно отличающемся по высоте рельефа от места взлета.
Полет по требованию¶
Команда Полет по требованию позволяет отправить БВС на указанную точку на карте (с указанием высоты). По достижении указанной точки БВС начнет удержание данной точки, пока оператор не вмешается в выполнение полетного задания, либо пока не сработает автоматический возврат по отсечке батареи.
- Нажмите на значок Полет по требованию.

Значок полета по требованию ¶
- Укажите точку на карте и задайте высоту полета над землей (Превышение).

Задание высоты полета по требованию ¶
По достижении точки БВС будет удерживать указанные координаты.

Пример полета по требованию ¶
Дистанционное управление¶
Активация режима дистанционного управления возможна после прохождения предстартовой подготовки и взлета.
- Нажмите на Значок Дистанционное управление.

Значок дистанционного управления ¶
При активации ручного режима БВС прервет выполнение задания по площадной или линейной АФС. После отключения ручного режима выполнение будет продолжено.
Будет осуществлен переход в ручной режим управления.
По умолчанию дистанционное управление осуществляется через Управление скоростями. В таком случае выполняется векторный контроль отклонений кнопками в окне дистанционного управления или клавиш:

Окно дистанционного управления ¶
- W – полет прямо по курсу (вперед)
- A — изменить направление полета в левую сторону (влево)
- S — полет в обратную сторону относительно курса (назад)
- D — изменить направление полета в правую сторону (вправо)
- T — набор высоты (вверх)
- G — снижение (вниз)
- [ – изменить курс в левую сторону (вращение влево)
- ] – изменить в правую сторону (вращение вправо)
Источник: www.geoscan.aero
Mission Planner
Mission Planner — программное обеспечение для настройки и управления ЛА, оснащённого полётным контроллером ArduPilot Mega.
Полное название: Mission Planner Ground Control Station или Mission Planner GCS.
Главный экран
Он же экран полётных данных, также содержащий окно HUD (Heads-up Display).
На нём отображаются следующие параметры полёта:
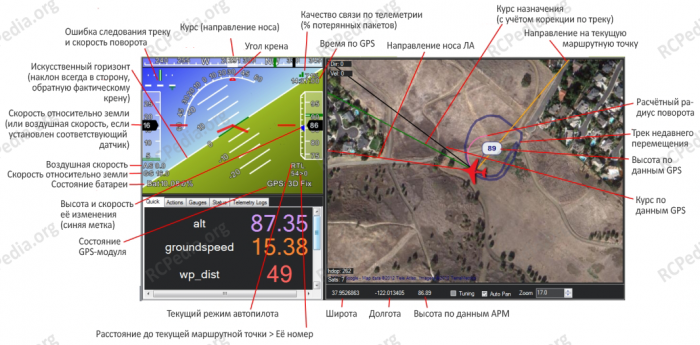
- Красная линия — фактический курс, направление носа (переда) ЛА.
- Зелёная линия — курс назначения с учётом коррекции по треку.
- Чёрная линия — курс, определённый по данным, полученным от GPS (обычно отличается от фактического).
- Жёлтая линия — направление на текущую маршрутную точку, к которой исполняется полёт.
- Desired turn radius — расчётный радиус поворота
- GPS reported altitude — высота по данным GPS
- Latitude — широта
- Longitude — долгота
- Track of recent travel — Трек недавнего перемещения
HUD
Вид окна HUD более крупно:
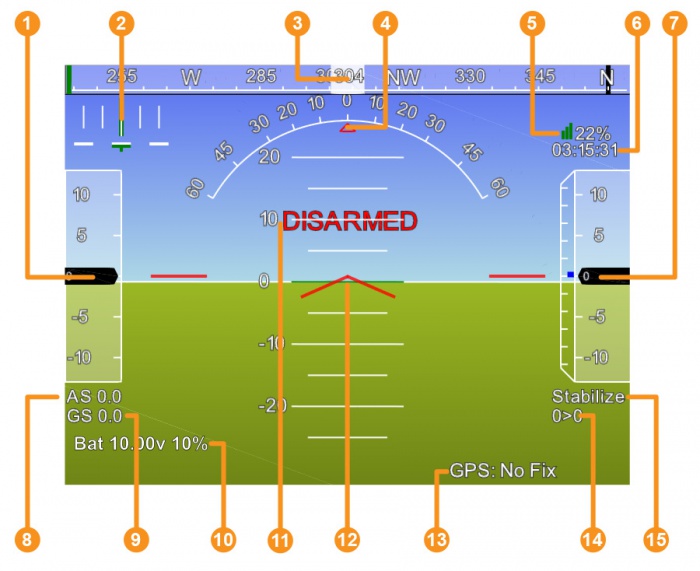
- Air speed или Ground speed — скорость относительно земли (или скорость относительно воздуха, если установлен соответствующий датчик)
- Сrosstrack error and turn rate — ошибка следования треку и скорость поворота
- Heading direction — Курс (направление носа ЛА)
- Bank angle — Угол крена
- Wireless telemetry connection — Качество передачи телеметрийных данных (% потерянных пакетов)
- GPS time — время по данным, полученным от GPS
- Altitude — высота по данным APM (синяя метка показывает скорость изменения высоты).
- Air speed — воздушная скорость (относительно воздуха), показывается только при наличии датчика.
- Ground speed — скорость относительно земли
- Battery status — состояние батареи
- Artificial Horizon — искусственный горизонт, (всегда реверсивен по отношению к крену ЛА).
- Pitch angle — Угол тангажа
- GPS status — состояние GPS-модуля
- Distance to current waypoint > Current waypoint number — расстояние до текущей точки маршрута и её номер
- Current autopilot mode — текущий режим автопилота
Полезно знать о главном экране
- На карте будет показываться текущая позиция только после того, как произойдёт определение координат по GPS. Или в любом случае — при использовании симулятора полёта.
- Как работает искусственный горизонт: когда ЛА кренится вправо, горизонт наклоняется влево. То есть всегда наклоняется в противоположную сторону. Часто это настораживает новичков: дескать, что-то перепутано, но на самом деле всё в норме.
- Следует в любой момент понимать, какой режим автопилота включен. Для того, чтобы полётный контроллер корректно воспринимал команды MAVlink от Mission Planner, он должен работать в одном из «автопилотных» режимах: Stabilize, Fly-by-Wire, Auto и т.п. Если же контроллер находится в режиме Manual, то все команды будут игнорироваться.
- Двойной клик на окне HUD позволит его распахнуть на весь экран на втором экране.
- Для того, чтобы использовать другие карты взамен Google Maps, нужно нажать Ctrl-F и загрузить собственные карты, которые должны быть подготовлены программой Global Mapper.
Guided Mode
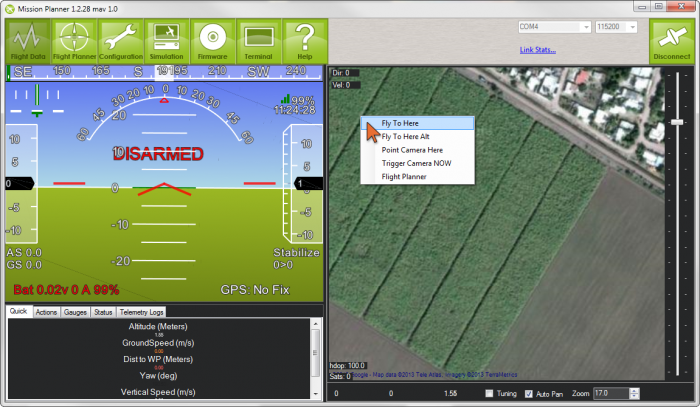
Одной из самых интересных особенностей Mission Planner является возможность управлять ЛА не прибегая к помощи пульта и не готовя заранее маршрут полёта. В окне карты в любом месте можно кликнуть правой кнопкой мыши и выбрать “Fly To Here”, то есть «лети сюда». ЛА полетит в заданную точку и зависнет в ожидании следующей команды. Это и есть режим “Guided Mode”, который обладает и другими интересными возможностями.
Внимание: “Guided Mode” — это самостоятельный режим полёта. Выбрав его, полётный контроллер будет оставаться в этом режиме до тех пор, пока не будет выбран какой-либо другой режим. К примеру, если выбрать точку на карте и дать команду “Fly To Here”, то после прибытия в неё ЛА будет зависать над ней до тех пор, пока из Mission Planner не поступит следующей команды, а именно: либо команды переместиться в другую точку, либо переключения в другой режим. Более того, если переключение произойдёт в режим Auto, то миссия (полёт по маршруту) возобновится с той точки, где она была прервана.
FAQ
Коптер наклоняю влево, а горизонт наклоняется вправо
Так работает искусственный горизонт: когда ЛА кренится вправо, горизонт наклоняется влево, так как показывает отклонение ЛА относительно реального горизонта т.е. всегда наклоняется в противоположную сторону. Часто это настораживает новичков: дескать, что-то работает неправильно, но на самом деле всё в норме.
В новых версиях Mission Planner пустые поля
Зайти на основную страницу Mission Planner , нажать комбинацию Ctrl+F, нажать Param Gen — это перезагрузит информацию о параметрах и всё будет нормально отображаться.
Значение настроек не сохраняются
К примеру, параметр Altitude Hold P в CONFIG/TUNING->Extended Tuning можно менять но значение не сохраняется. Так же и другие параметры (в этом или других окнах). Замечено в свежих версиях Mission Planner (глюки?). Как с этим бороться:
- отключиться в Mission Planner от контроллера, затем заново подключиться;
- установить настройки по-умолчанию;
- найти и поменять параметр в полном списке параметров Mission Planner.
Невозможно соединится с удаленным сервером (карта)
Можно попробовать поменять провайдера карт (на экране планировки миссий). Например, Яндекс-карты хорошо работают.
Красные области на карте — что и как


По задумке — это запретные или ограниченные для полётов территории (вокруг аэропортов, режимных объектов и т.п.). По факту, полёты и выполнения миссий не ограничиваются. Но пилотам следует принимать во внимание эти предупреждения и, по возможности, не осуществлять полёты в этих территориях.
В папке Mission Planner есть файл airports.csv, если удалить из него все данные, и вместо них написать «1» в первой строке, то Mission Planner перестанет делать предупреждения на карте.
Параметры Mission Planner
Ссылки
- Разные версии Mission planner
- Сервис просмотра графика
См. также
- Tower (DroidPlanner 3) — приложение для настройки и управления APM на Android-устройствах.
- ArduPilot
Источник: multicopterwiki.ru