
В задании 20 практической части экзаменационной работы по информатике проверяется умение написать короткий алгоритм в среде формального исполнителя (вариант задания 20.1) или на языке программирования (вариант задания 20.2). Каждый участник экзамена самостоятельно выбирает один из двух вариантов задания 20.1 или 20.2. Выполнение обоих вариантов не приносит дополнительных баллов экзаменуемому, в протокол проверки выставляется одна оценка.
Приведем последовательность действий при решении задания 20.1 ОГЭ по информатике и ИКТ.
Для выполнения задания рекомендуется использование учебной среды исполнителя «Робот». В качестве такой среды может использоваться, например, учебная среда разработки «Кумир», разработанная в НИИСИ РАН (http://www.niisi.ru/kumir), или любая другая среда, позволяющая моделировать исполнителя «Робот».
Рассмотрим пример задания.
В бесконечном поле расположена горизонтальная стена, в которой имеются два разрыва. Точное расположение разрывов и их длины неизвестны. Робот находится в одной из клеток, прилегающей сверху к левому участку стены. На рисунке указан один из возможных способов расположения стен и Робота (Робот обозначен буквой «Р»).
РОБОТ Оказался Человеком! Что скрывает Робот в Ангаре?

Напишите для Робота алгоритм, закрашивающий клетки, расположенные непосредственно под разрывами в стене. Робот должен закрасить только эти клетки. Например, для приведенного выше рисунка робот должен закрасить следующие клетки.

При исполнении алгоритма Робот не должен разрушиться, выполнение алгоритма должно завершиться. Конечное расположение Робота может быть произвольным.
Алгоритм должен решать задачу для любого допустимого расположения разрывов. Алгоритм может быть выполнен в среде формального исполнителя или записан в текстовом редакторе.
Решение.
1. Необходимо оценить какие особенности обстановки могут изменяться, а какие точно известны. Придумать несколько обстановок, удовлетворяющих условию, но отличных от приведенной в задании.
Точно известно, что Робот находится в одной из клеток, прилегающей сверху к левому участку стены. Затем идет разрыв, вторая часть стены, разрыв, третья часть стены. Точное расположение разрывов и их длины неизвестны.
2. Редактируем обстановку в соответствии с заданием. В программе Кумир версии 2.1.0 (rc7) команда Робот – Редактировать обстановку…


3. Описываем алгоритм словесно, разделяя его на смысловые части: Робот движется до конца левой части стены, спускается вниз, закрашивает клетки до начала второй части стены, далее движется вправо до конца средней части, снова закрашивает клетки разрыва до начала правой части стены.
Так как длины стен неизвестны, то чтобы их преодолеть потребуется использовать повторение команды движения вправо пока Робот не дойдет до конца стены. Так как длины разрывов неизвестны, то чтобы их закрасить все клетки разрыва потребуется повторять команды закрашивания клетки и движения вправо до начала следующей стены.
ОГЭ информатика. Задание 20.1. Исполнитель Робот
Поскольку Робот может находиться в любой клетке над левой частью стены, то рационально добраться сначала до первого разрыва, потом спуститься вниз, чтобы оказаться в ряду клеток, которые должны быть закрашены. Таким образом, Робот движется вправо, контролируя наличие стены снизу. Цикл заканчивается, когда Робот находится в первой клетке над разрывом в стене. Робот опускается на клетку вниз и оказывается под началом разрыва.
| . нц пока не снизу свободно . . вправо . кц . вниз |
Далее следует закрасить клетки до второй части стены, выполняя сначала команду закрашивания, а потом движения вправо.
| . нц пока сверху свободно . . закрасить . . вправо . кц |
Теперь можно двигаться по клеткам снизу стены до второго разрыва.
В отличие от движения по первой части стены, Робот движется вправо, контролируя наличие стены сверху.
| . нц пока не сверху свободно . . вправо . кц |
Клетки второго разрыва закрашиваются аналогично первому.
Таким образом алгоритм состоит из 4 циклов и одного внециклического действия.

Примечание: в задачах, требующих закрашивать клетки, например, вверху (внизу) ступенек лестницы для фиксирования повторяющихся команд можно использовать пульт управления Роботом.
4. Изменить обстановку, проверить алгоритм. В случае если алгоритм не работает должным образом, то нужно провести проверку работоспособности каждой части цикла, используя команду пошагового выполнения, исправить ошибки.


По отзывам ребят, сдающих ОГЭ по информатике и ИКТ, написать алгоритм движения для Робота намного проще, чем программу на одном из языков программирования. Синтаксис алгоритмического языка воспринимается ими гораздо легче, чем, например, синтаксис Pascal. Безусловно, при подготовке к экзамену необходимо уделить достаточно времени для решения задания 20.2, особенно тем ребятам, которые планируют в будущем сдавать ЕГЭ. А на экзамене в 9 классе для решения лучше выбрать задание 20.1.
Примеры заданий в галерее:
Источник: informaticsdairy.wordpress.com
Самостоятельная работа № 18 «Цикл с заданным условием окончания работы»
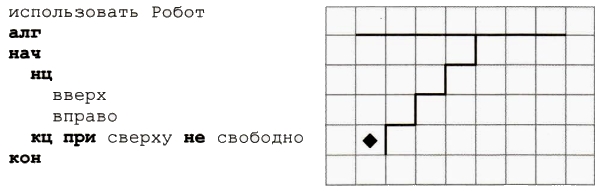
1. В какой клетке окажется Робот после исполнения программы? Начальное положение Робота отмечено ромбиком.
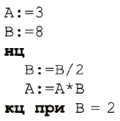
2. Определите значение переменной А после выполнения фрагмента алгоритма.
3. Составьте блок-схему, соответствующую одному из алгоритмов, рассмотренных в предыдущих заданиях.
4. Дополнительное задание. Составьте блок-схему решения следующей задачи.
Медведь, впадая в зимнюю спячку, весил 200 кг. Каждый день во время сна он худеет на 1700 г. Через сколько дней медведь проснётся, если условием его выхода из зимней спячки является снижение веса на 50% от первоначального?
Вариант 2
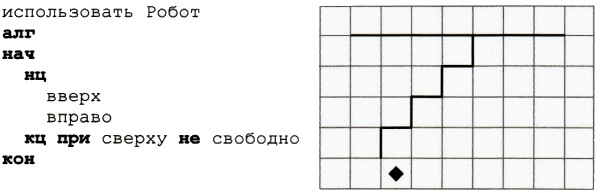
1. В какой клетке окажется Робот после исполнения программы? Начальное положение Робота отмечено ромбиком.
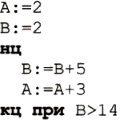
2. Определите значение переменной А после выполнения фрагмента алгоритма.
3. Составьте блок-схему, соответствующую одному из алгоритмов, рассмотренных в предыдущих заданиях.
4. Дополнительное задание. Составьте блок-схему решения следующей задачи.
Медведь, впадая в зимнюю спячку, весил 160 кг. Каждый день во время сна он худеет на 1200 г. Через сколько дней медведь проснётся, если условием его выхода из зимней спячки является снижение веса до 80 кг?
Источник: xn—-7sbbfb7a7aej.xn--p1ai
04-05.05.2022 8-10 класс Пригласительный школьный этап по технологии Робототехника 2022-2023
Задания и ответы пригласительного этапа 2022 года ВОШ (Сириус) по Технологии для 8-10 класса всероссийская олимпиада школьников, дата проведения онлайн олимпиады: 04-05.05.2022 (04-05 мая 2022 г.).
Подпишись на телеграмм канал — pndexam.me/
Приобрести задания | Приобрести задания и ответы
Задание 1
Станция московского метро «Новослободская» украшена витражами, сделанными по эскизам художника Павла Корина. Витражи изготавливали в специальных мастерских, которые располагались в Риге. Бо́льшую часть композиции занимает рисунок из различных цветов, растений и звёзд. В верхней части витражей вставлены небольшие медальоны с изображением людей различных профессий. Рассмотрите предложенные фрагменты витражей.
Установите соответствие между изображениями представителей профессий, изображённых на фотографиях витражей, и названиями профессий.

Задание 2
Рассмотрите приведённую фотографию. Определите, какой бытовой прибор на ней изображён.
фритюрница
мультиварка
соковыжималка
кухонный комбайн
стиральная машина
микроволновая печь
электрический чайник
Задание 3
Из использованных пластиковых бутылок (ПЭТ) в результате переработки можно изготовить много полезных вещей, например, мебель, одежду и обувь. Узнать пластиковые изделия (ПЭТ), пригодные для переработки, можно по специальной экомаркировке (см. маркировку).
На изготовление 25 новых пластиковых стульев уходит 2500 пластиковых бутылок (ПЭТ).
Сколько стульев можно будет изготовить из 128 000 таких пластиковых бутылок?
Задание 4
Установите соответствие между изделиями народных промыслов, изображёнными на рисунках, и названиями росписи, в которой они выполнены.

Задание 5
Для подарка Маша решила собрать набор из одной синей ручки, одного простого карандаша, одного ластика и одной линейки. После просмотра ассортимента интернет-магазина Маша выбрала следующие товары (см. таблицу покупок).
| № | Название | Цена в руб. за 1 шт. |
| 1 | Ручка шариковая синяя | 40* |
| 2 | Карандаш чёрнографитный Эко НВ заточенный | 23 |
| 3 | Ластик каучуковый прямоугольный | 35 |
| 4 | Линейка 30 см пластиковая | 32* |
∗ На сайте на все линейки и шариковые ручки действует скидка 7 %.
Определите, сколько можно купить таких наборов на 2,7 тысячи рублей.
Задание 6
Рассмотрите приведённую фотографию. Определите, какого рода рычаг используется в данном механизме.
Щипцы для выпечки
рычаг 1-го рода
рычаг 2-го рода
рычаг 3-го рода
рычаг 4-го рода
Задание 7
С помощью двух шкивов и ремня Даша собрала ременную передачу. Диаметр ведущего шкива равен 30 мм. За три минуты ведущий шкив делает 60 оборотов. Ведомый шкив делает 40 оборотов в минуту. Определите, чему равен диаметр ведомого шкива.
Ответ дайте в миллиметрах.
Задание 8
Серёжа выпилил из фанеры деталь (см. чертёж детали).
На чертеже размеры указаны в миллиметрах. Серёжа решил покрасить деталь с двух сторон синей масляной краской. Определите, сколько краски для этого понадобится (см. расход краски).
| № п/п | Цвет масляной краски | Площадь, которую можно покрасить 1 г краски (в кв. дециметрах) |
| 1 | Белая | 1 |
| 2 | Жёлтая | 1 |
| 3 | Зелёная | 1,3 |
| 4 | Синяя | 1,5 |
| 5 | Чёрная | 2 |
Ответ дайте в граммах.
Задание 9
Миша собрал из резисторов следующую схему (см. схему участка цепи AB).
Схема участка цепи АВ
| № | Обозначение | Номинал (Ом) |
| 1 | R1 | 10 |
| 2 | R2 | 15 |
| 3 | R3 | 20 |
| 4 | R4 | 25 |
| 5 | R5 | 30 |
| 6 | R6 | 35 |
Определите величину сопротивления участка AB. Ответ дайте в Омах, округлив результат до десятых.
Величина сопротивления участка AB —
Такое подключение резисторов, как представлено на участке цепи AB, называется смешанным подключением. Его можно представить в виде комбинации участков, на которых резисторы соединены последовательно или параллельно.
При последовательном соединении резисторов общее сопротивление участка цепи можно посчитать, сложив номиналы резисторов.
При параллельном соединении резисторов общее сопротивление участка можно посчитать следующим образом:1Rпаралл.=1R1+1R2+…
Задание 10
Робот оснащён двумя отдельно управляемыми колёсами. Левым колесом управляет мотор AA, правым колесом управляет мотор BB. Колёса напрямую подсоединены к моторам (см. схему робота).
Робота устанавливают на поле, разделённом на равные квадратные клетки (см. схему поля).
Длина и ширина робота меньше длины стороны клетки поля. Направление вперёд на схеме показано направлением стрелки.
Робот может выполнить следующие команды:
| № | Команда | Описание | Пример выполнения |
| 1 | ВПЕРЁД | Робот проезжает вперёд на 1 клетку. Направление «вперёд» для робота при этом не меняется | |
| 2 | ВПРАВО | Робот перемещается на 1 клетку вперёд, а затем на 1 клетку вправо. Направление «вперёд» для робота при этом меняется | |
| 3 | ВЛЕВО | Робот перемещается на 1 клетку вперёд, а затем на 1 клетку влево. Направление «вперёд» для робота при этом меняется |
Робота установили в центр клетки D4, расположив его так, что если робот проедет ВПЕРЁД, то он окажется в центре клетки E4.
Робот выполнил программу:
НАЧАЛО
ПОВТОРИТЬ 3 РАЗА
ВПРАВО
КОНЕЦ ПОВТОРИТЬ
ПОВТОРИТЬ 3 РАЗА
ВПЕРЁД
КОНЕЦ ПОВТОРИТЬ
ПОВТОРИТЬ 3 РАЗА
ВЛЕВО
КОНЕЦ ПОВТОРИТЬ
ПОВТОРИТЬ 4 РАЗА
ВПЕРЁД
КОНЕЦ ПОВТОРИТЬ
ВЛЕВО
КОНЕЦ
Определите, в какой клетке окажется робот после завершения выполнения данной программы.
Задание 11
У Кати есть шестерёнки трёх типов (см. таблицу свойств шестерёнок).
Таблица свойств шестерёнок
Она собрала из них зубчатую передачу, использовав все имеющиеся у неё шестерёнки (см. зубчатую передачу).
Катя соединила ведущую ось с валом мотора, который за 2 минуты совершает 90 оборотов.
Определите, сколько оборотов в минуту будет делать ведомая ось передачи, которую собрала Катя.
Задание 12
Робот оснащён двумя отдельно управляемыми колёсами, радиус каждого из колёс робота равен 5 см. Левым колесом управляет мотор A, правым колесом управляет мотор B. Колёса напрямую подсоединены к моторам (см. схему робота).
Определите, на сколько градусов должна повернуться ось мотора A (при выключенном моторе B), чтобы робот повернулся направо вокруг колеса B на 135∘. Длина колёсной базы робота равна 40 см. При расчётах примите π≈3,14
Ответ дайте в градусах, округлив результат до целого. Чтобы получить более точный ответ, округление стоит производить только при получении финального ответа.
Задание 13
Робот-чертёжник движется по ровной горизонтальной поверхности и наносит на неё изображение (см. траекторию) при помощи кисти, закреплённой посередине между колёс. Из-за крепления кисти робот не может ехать назад. Все повороты робот должен совершать на месте, вращая колёса с одинаковой скоростью в противоположных направлениях.
Робот должен нарисовать четырёхугольник, углы которого равны 55∘, 72∘, 100∘ и 133∘.
Робот оснащён двумя отдельно управляемыми колёсами, расстояние между центрами колёс составляет 25 см, радиус колеса робота 7 см.
Определите, на какой минимальный суммарный угол должен повернуться робот, чтобы начертить данную фигуру.
Ответ дайте в градусах.
Задание 14
Робот оснащён двумя отдельно управляемыми колёсами, радиус каждого из колёс робота равен 6 см. Левым колесом управляет мотор A, правым колесом управляет мотор B. Колёса напрямую подсоединены к моторам (см. схему робота).
Определите, на сколько градусов должна повернуться ось мотора A (при работающем моторе B), чтобы робот проехал прямолинейный участок трассы длиной 2 м 5 см. Длина колёсной базы робота равна 40 см. При расчётах примите π≈3,14.
Ответ дайте в градусах, округлив результат до целого. Чтобы получить более точный ответ, округление стоит производить только при получении финального ответа.
Задание 15
Робот оснащён двумя отдельно управляемыми колёсами. Левым колесом управляет мотор A, правым колесом управляет мотор B. Колёса напрямую подсоединены к моторам (см. схему робота). На роботе установлен один датчик освещённости.
Саша написал программу, чтобы робот ехал по чёрной линии. Этот фрагмент кода отвечает за движение по чёрной линии:
При калибровке на чёрном датчик робота показал 7, при калибровке на белом показал 91. В качестве значения границы серого Саша взял среднее арифметическое показаний датчика на чёрном и на белом.
Определите, какая мощность будет подана на моторы A и B при показаниях датчика s1, равных 40.
Мощность мотора A –
Мощность мотора B –
Справочная информация
Пропорциональный закон выглядит следующим образом: U=k(O–B).
U– это управляющее воздействие – это то, что корректирует величину мощности моторов в данный момент времени.
k – это коэффициент усиления воздействия.
O – текущее показание датчика.
B – желаемое состояние – это граница серого.
Источник: pndexam.ru