

Урок 3.2 Лабиринт. Подпрограммы
Энкодеры
Широколобов И. Ю.
Эти материалы распространяются по лицензии Creative Commons «Attribution-NonCommercial-ShareAlike»
(«Атрибуция — Некоммерческое использование — На тех же условиях») 3.0 Непортированная. Чтобы ознакомиться
с экземпляром этой лицензии, посетите http://creativecommons.org/licenses/by-nc-sa/3.0/ или отправьте письмо
на адрес Creative Commons: 444 Castro Street, Suite 900, Mountain View, California, 94041, USA
Санкт-Петербург, 2015
2.
Лабиринт
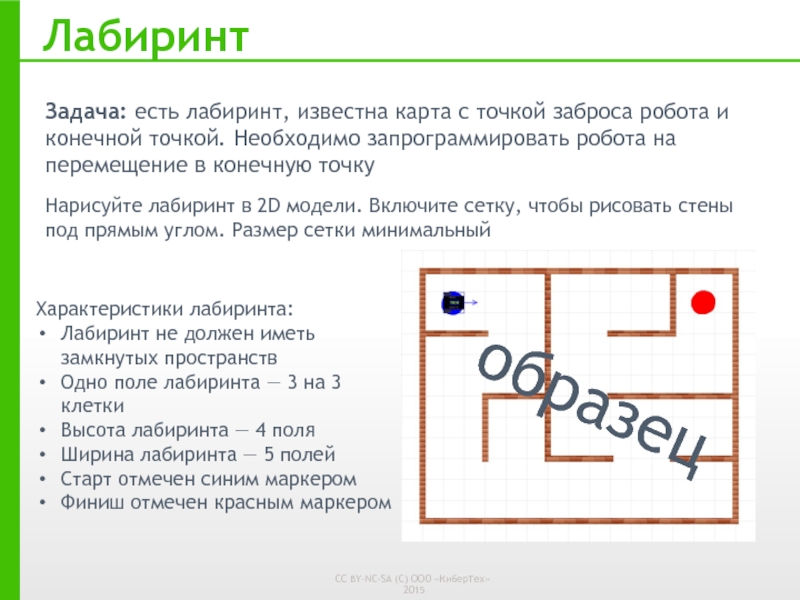
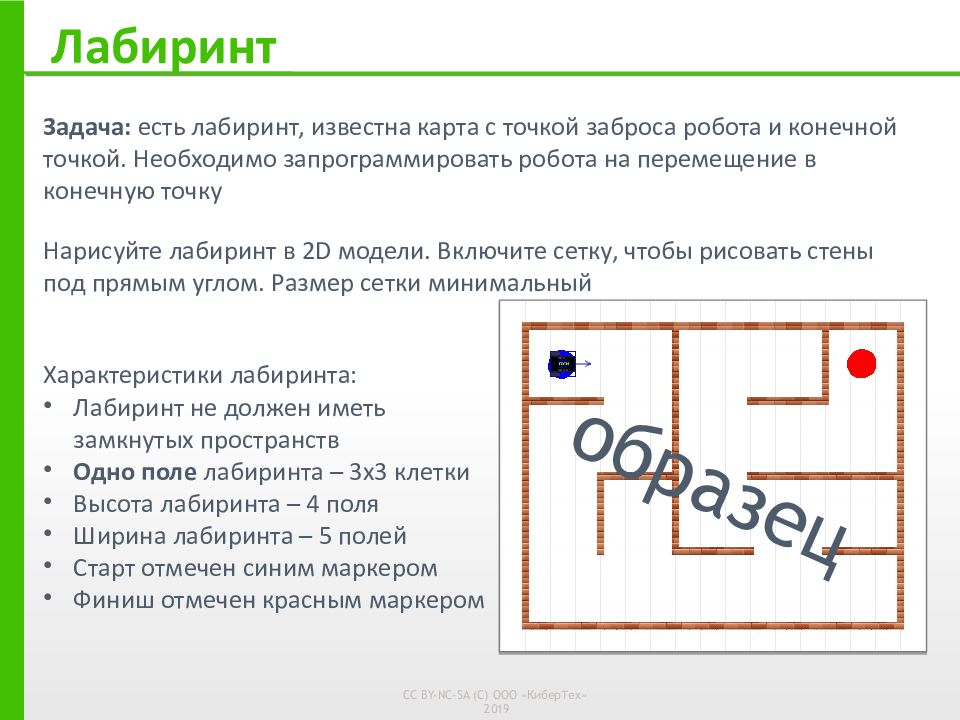
Задача: есть лабиринт, известна карта с точкой заброса робота и
конечной точкой. Необходимо запрограммировать робота на
перемещение в конечную точку
Нарисуйте лабиринт в 2D модели. Включите сетку, чтобы рисовать стены
TRIK Studio Junior / Упражнение «Лабиринт»
под прямым углом. Размер сетки минимальный
Характеристики лабиринта:
• Лабиринт не должен иметь
замкнутых пространств
• Одно поле лабиринта — 3 на 3
клетки
• Высота лабиринта — 4 поля
• Ширина лабиринта — 5 полей
• Старт отмечен синим маркером
• Финиш отмечен красным маркером
CC BY-NC-SA (C) ООО «КиберТех»
2015
3.
Лабиринт
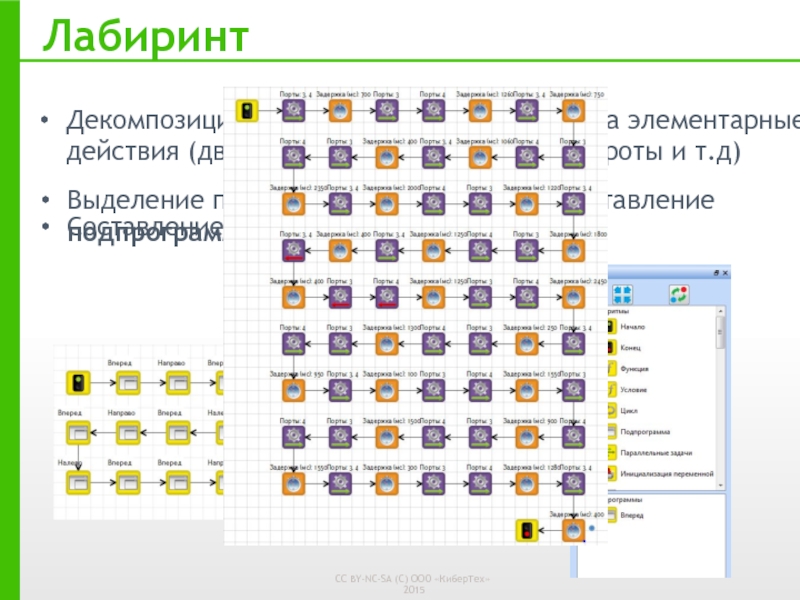
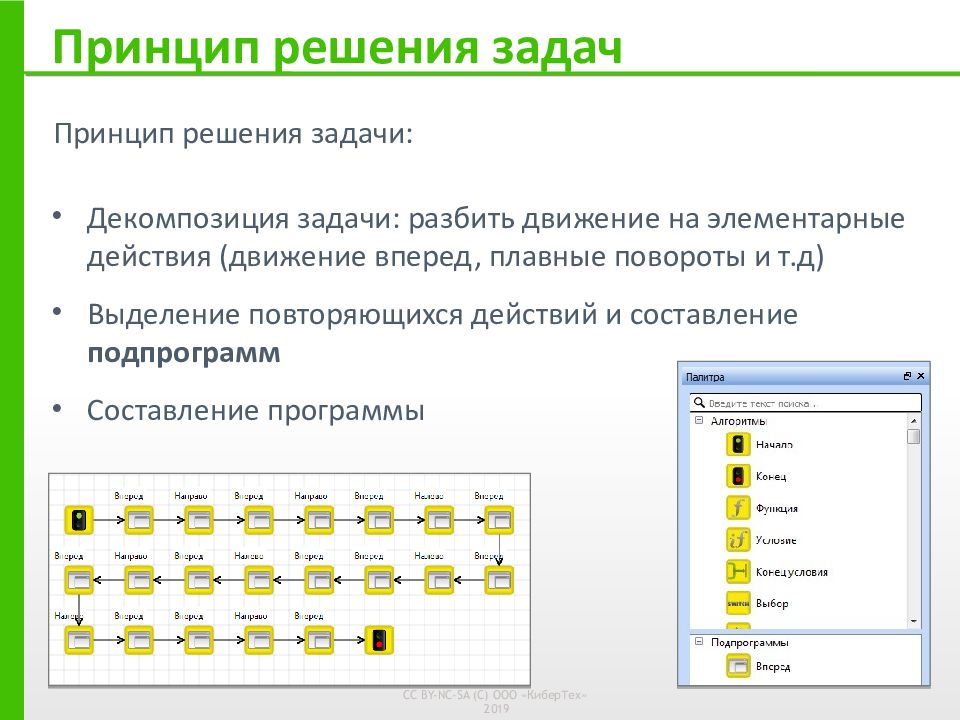
• Декомпозиция задачи: разбить движение на элементарные
действия (движение вперед, плавные повороты и т.д)
• Выделение повторяющихся действий и составление
• Составление
программы
подпрограммы
CC BY-NC-SA (C) ООО «КиберТех»
2015
4.
Лабиринт
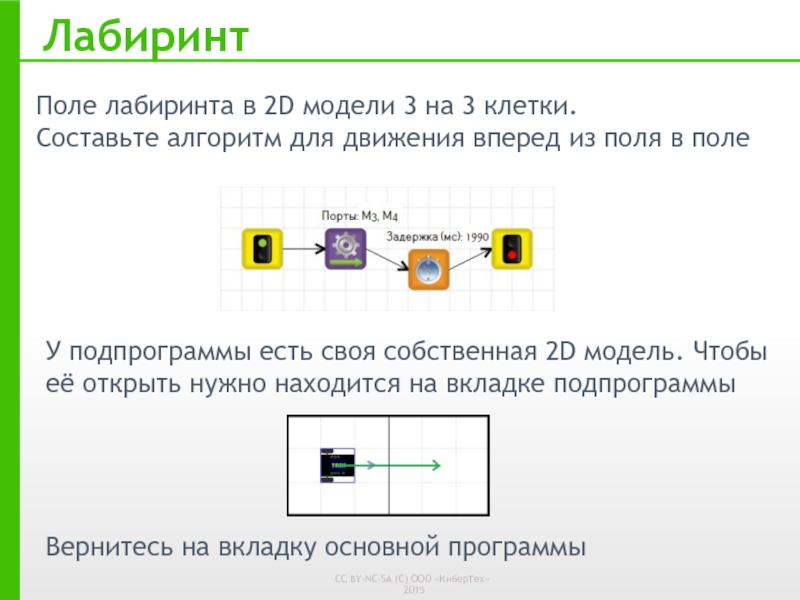
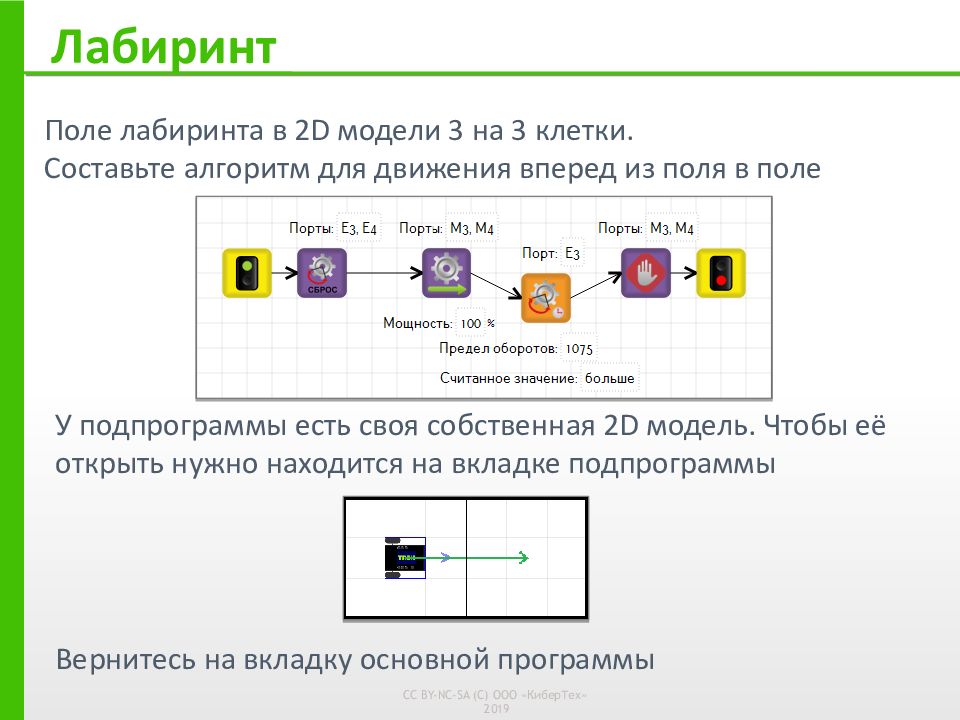
Поле лабиринта в 2D модели 3 на 3 клетки.
Составьте алгоритм для движения вперед из поля в поле
У подпрограммы есть своя собственная 2D модель. Чтобы
её открыть нужно находится на вкладке подпрограммы
Вернитесь на вкладку основной программы
CC BY-NC-SA (C) ООО «КиберТех»
2015
5.
Лабиринт
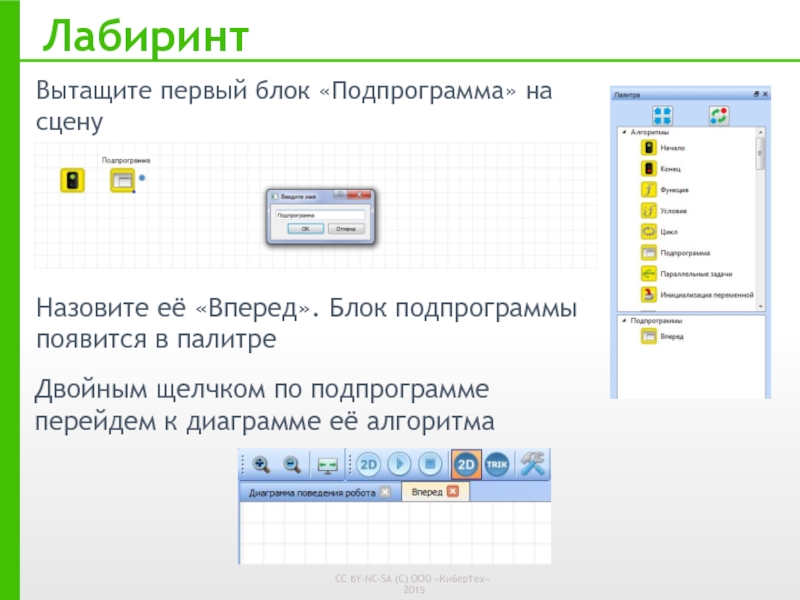
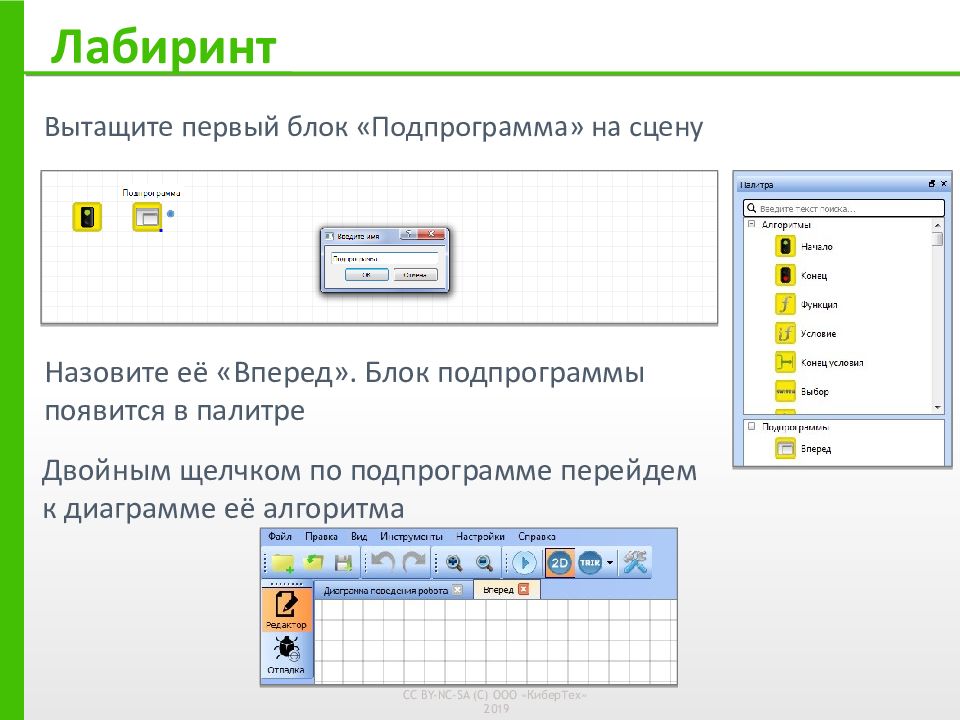
Вытащите первый блок «Подпрограмма» на
сцену
Назовите её «Вперед». Блок подпрограммы
появится в палитре
Двойным щелчком по подпрограмме
перейдем к диаграмме её алгоритма
CC BY-NC-SA (C) ООО «КиберТех»
2015
6.
Лабиринт
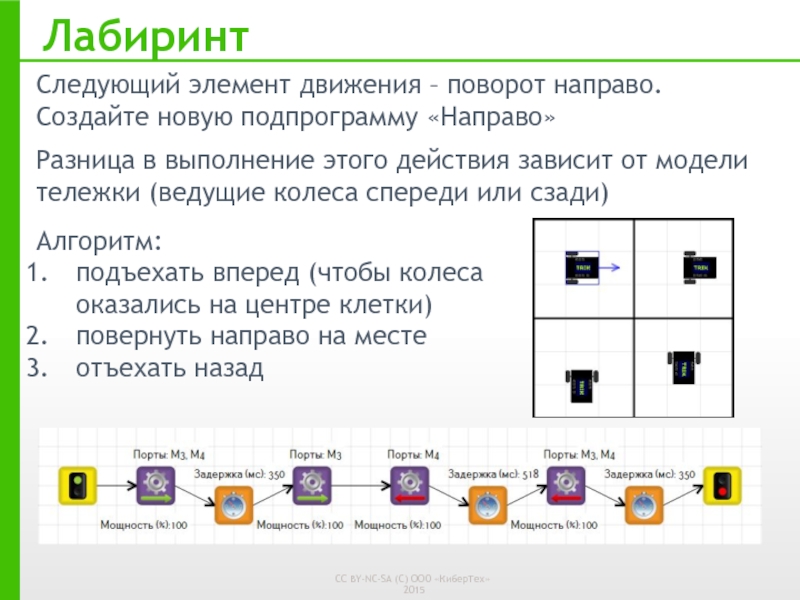
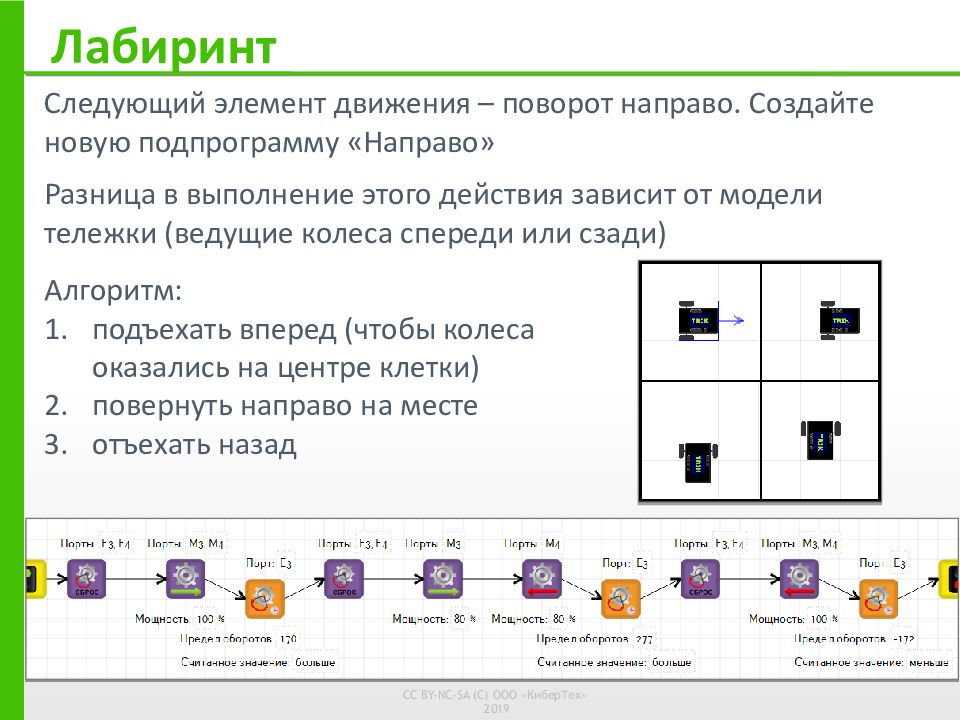
Следующий элемент движения – поворот направо.
Создайте новую подпрограмму «Направо»
Разница в выполнение этого действия зависит от модели
тележки (ведущие колеса спереди или сзади)
Алгоритм:
1. подъехать вперед (чтобы колеса
оказались на центре клетки)
2. повернуть направо на месте
3. отъехать назад
CC BY-NC-SA (C) ООО «КиберТех»
2015
7.
Лабиринт
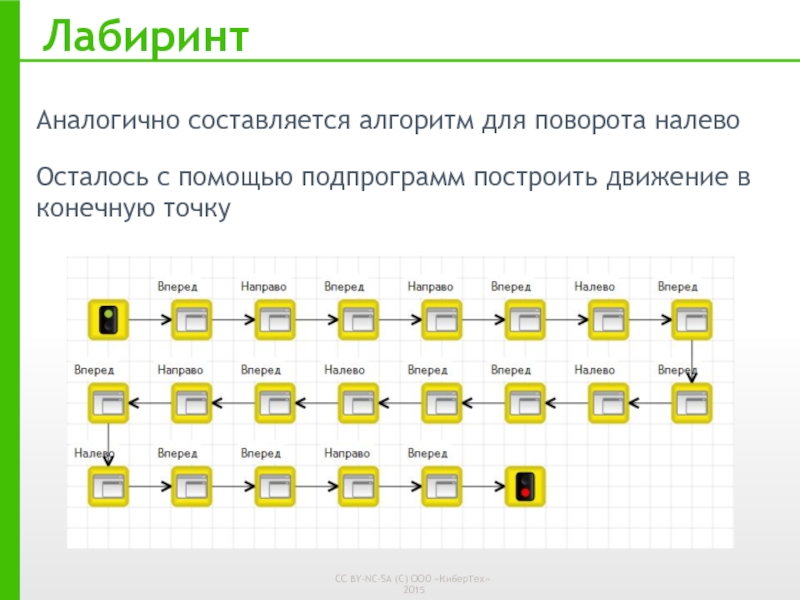
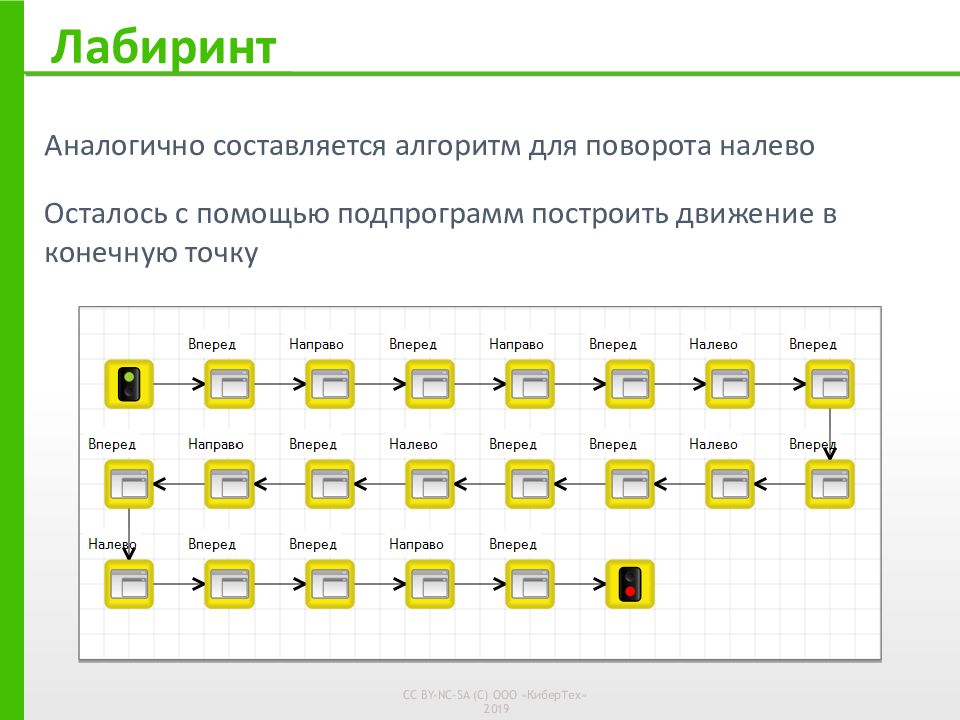
Аналогично составляется алгоритм для поворота налево
Осталось с помощью подпрограмм построить движение в
конечную точку
CC BY-NC-SA (C) ООО «КиберТех»
Трик Студия Лабиринт копированием
2015
8.
Правило правой руки
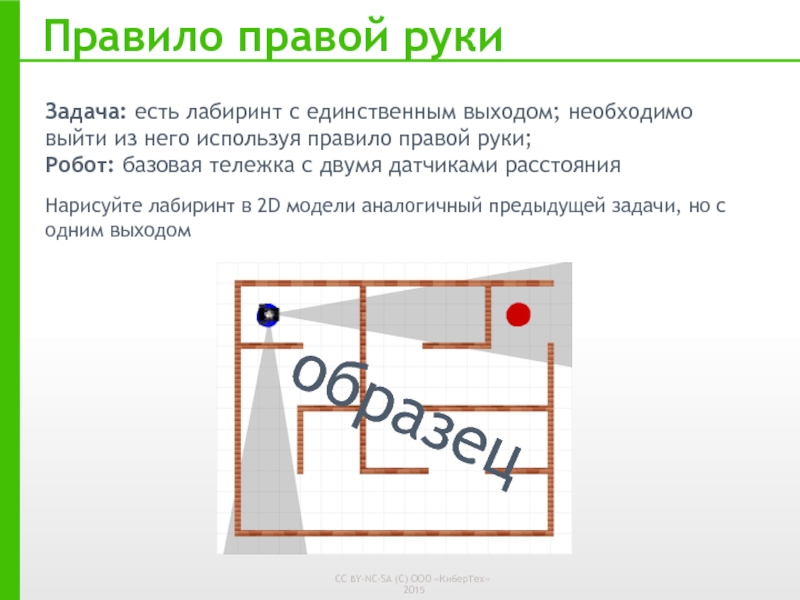
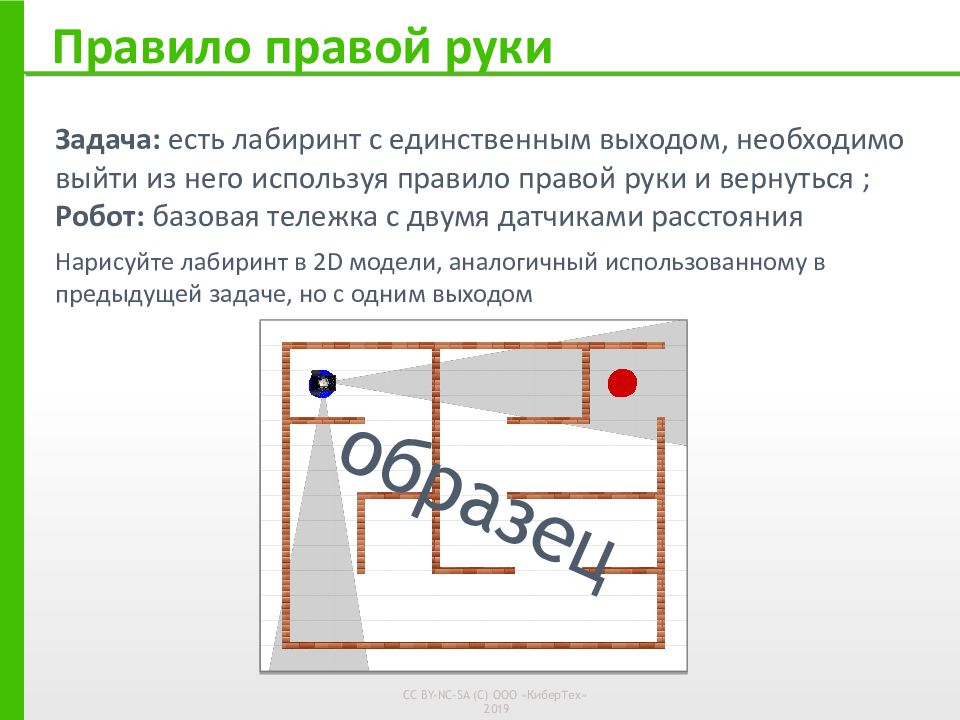
Задача: есть лабиринт с единственным выходом; необходимо
выйти из него используя правило правой руки;
Робот: базовая тележка с двумя датчиками расстояния
Нарисуйте лабиринт в 2D модели аналогичный предыдущей задачи, но с
одним выходом
CC BY-NC-SA (C) ООО «КиберТех»
2015
9.
Правило правой руки
Алгоритм
Начало
нет
Есть ли
справа
стена?
да
нет
Повернуть
направо
Вперед
Вперед
ожидание
CC BY-NC-SA (C) ООО «КиберТех»
2015
Есть ли
впереди
стена?
да
Повернуть
налево
10.
Правило правой руки
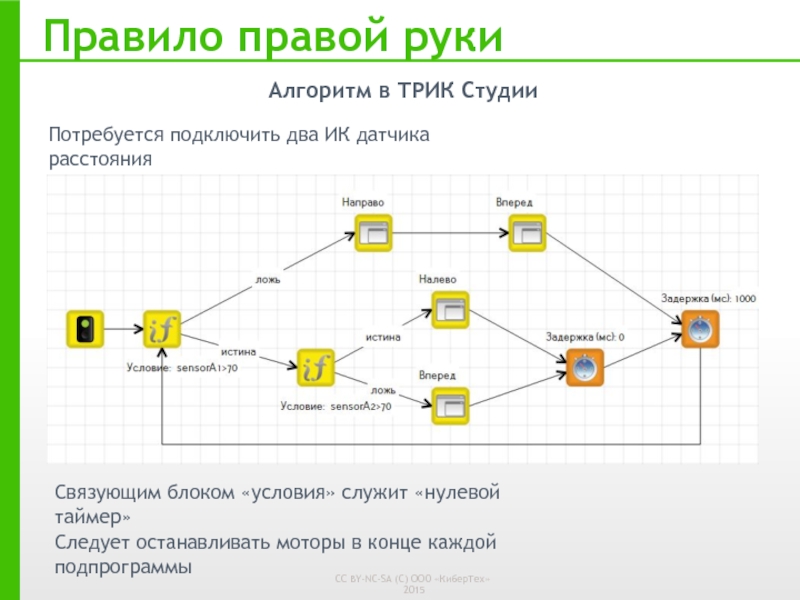
Алгоритм в ТРИК Студии
Потребуется подключить два ИК датчика
расстояния
Связующим блоком «условия» служит «нулевой
таймер»
Следует останавливать моторы в конце каждой
подпрограммы
CC BY-NC-SA (C) ООО «КиберТех»
2015
11.
Тайм-модель и энкодерная модель
Тайм-модель – модель с движением по таймеру
минус: сильно зависит от заряда батареи
Энкодерная модель (правильная) – модель с движением по энкодерам
Энкодер – датчик угла поворота
Важно: нужно сбрасывать энкодеры перед
подсчетом.
CC BY-NC-SA (C) ООО «КиберТех»
2015
Источник: ppt-online.org
Презентация на тему 3.2. Лабиринт. Подпрограммы. Энкодеры [ТРИК]
Лабиринт Нарисуйте лабиринт в 2D модели. Включите сетку, чтобы рисовать стены под прямым углом. Размер сетки минимальный Характеристики лабиринта: Лабиринт не должен иметь замкнутых пространств Одно поле лабиринта — 3 на
- Главная
- Разное
- 3.2. Лабиринт. Подпрограммы. Энкодеры [ТРИК]
Слайды и текст этой презентации
Слайд 1Урок 3.2 Лабиринт. Подпрограммы Энкодеры
Широколобов
И. Ю.
Слайд 2Лабиринт
Нарисуйте лабиринт в 2D модели. Включите сетку,
чтобы рисовать стены под прямым углом. Размер
сетки минимальный
Характеристики лабиринта:
Лабиринт не должен иметь замкнутых пространств
Одно поле лабиринта — 3 на 3 клетки
Высота лабиринта — 4 поля
Ширина лабиринта — 5 полей
Старт отмечен синим маркером
Финиш отмечен красным маркером
Задача: есть лабиринт, известна карта с точкой заброса робота и конечной точкой. Необходимо запрограммировать робота на перемещение в конечную точку
Слайд 3Лабиринт
Декомпозиция задачи: разбить движение на элементарные действия
(движение вперед, плавные повороты и т.д)
Составление программы
Выделение
повторяющихся действий и составление подпрограммы
Слайд 4Лабиринт
Поле лабиринта в 2D модели 3
на 3 клетки. Составьте алгоритм для движения вперед
из поля в поле
У подпрограммы есть своя собственная 2D модель. Чтобы её открыть нужно находится на вкладке подпрограммы
Вернитесь на вкладку основной программы
Слайд 5Лабиринт
Вытащите первый блок «Подпрограмма» на сцену
Назовите её
«Вперед». Блок подпрограммы появится в палитре
Двойным щелчком
по подпрограмме перейдем к диаграмме её алгоритма
Слайд 6Лабиринт
Следующий элемент движения – поворот направо.
Создайте новую подпрограмму «Направо»
Разница в выполнение этого
действия зависит от модели тележки (ведущие колеса спереди или сзади)
Алгоритм:
подъехать вперед (чтобы колеса оказались на центре клетки)
повернуть направо на месте
отъехать назад
Слайд 7Лабиринт
Аналогично составляется алгоритм для поворота налево
Осталось с
помощью подпрограмм построить движение в конечную точку
Слайд 8Правило правой руки
Задача: есть лабиринт с единственным
выходом; необходимо выйти из него используя правило
правой руки;
Робот: базовая тележка с двумя датчиками расстояния
Нарисуйте лабиринт в 2D модели аналогичный предыдущей задачи, но с одним выходом
Слайд 9Правило правой руки
Алгоритм
Есть ли справа стена?
Повернуть направо
Вперед
Начало
Есть
ли впереди стена?
Вперед
Повернуть налево
ожидание

Слайд 10Правило правой руки
Алгоритм в ТРИК Студии
два ИК датчика расстояния
Связующим блоком «условия» служит
«нулевой таймер»
Следует останавливать моторы в конце каждой подпрограммы
Слайд 11Тайм-модель и энкодерная модель
Тайм-модель – модель
с движением по таймеру
минус: сильно зависит от
заряда батареи
Энкодерная модель (правильная) – модель с движением по энкодерам
Энкодер – датчик угла поворота
Важно: нужно сбрасывать энкодеры перед подсчетом.
Источник: thepresentation.ru
Лабиринт. Подпрограммы — презентация

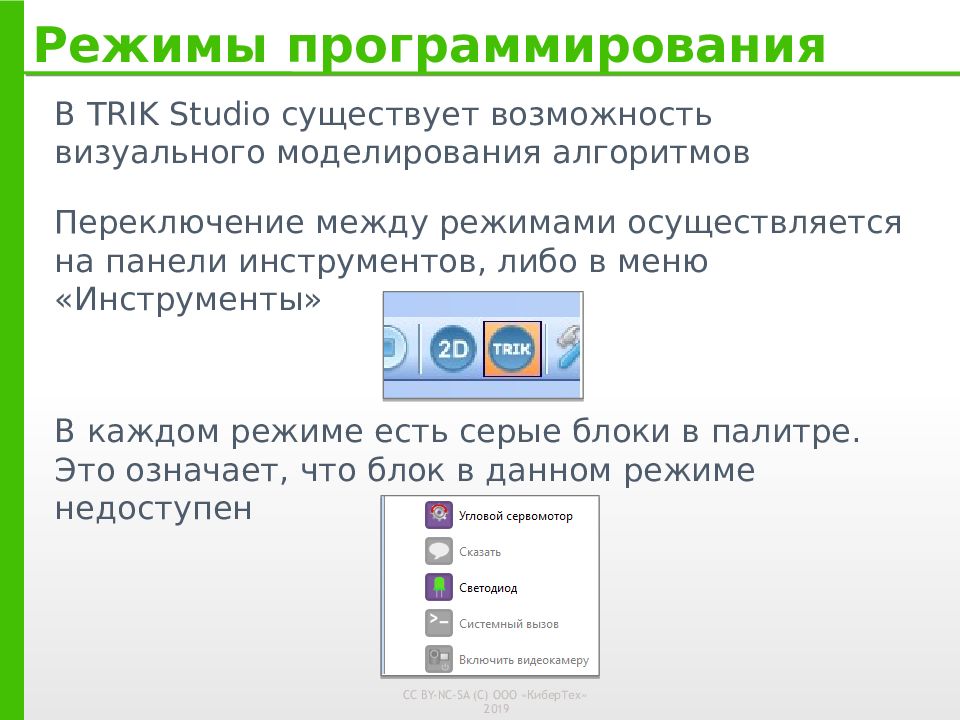
В TRIK Studio существует возможность визуального моделирования алгоритмов Переключение между режимами осуществляется на панели инструментов, либо в меню «Инструменты» В каждом режиме есть серые блоки в палитре. Это означает, что блок в данном режиме недоступен
Изображение слайда
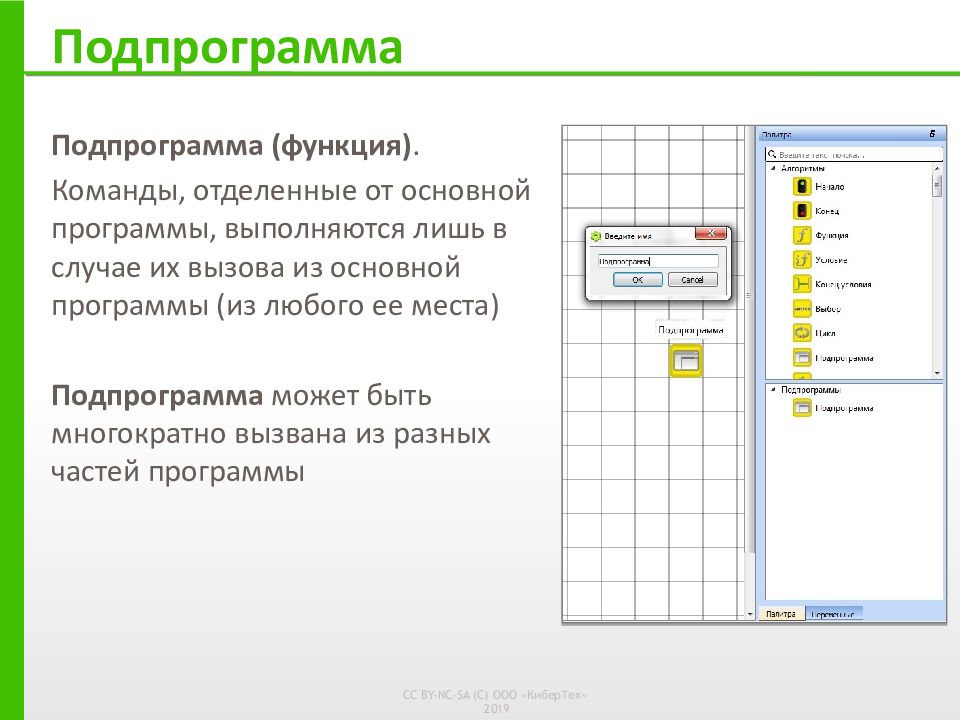
Слайд 6: Подпрограмма
(функция). Команды, отделенные от основной программы, выполняются лишь в случае их вызова из основной программы (из любого ее места) Подпрограмма может быть многократно вызвана из разных частей программы Подпрограмма
Изображение слайда
Слайд 7: Лабиринт
Нарисуйте лабиринт в 2 D модели. Включите сетку, чтобы рисовать стены под прямым углом. Размер сетки минимальный Характеристики лабиринта: Лабиринт не должен иметь замкнутых пространств Одно поле лабиринта – 3х3 клетки Высота лабиринта – 4 поля Ширина лабиринта – 5 полей Старт отмечен синим маркером Финиш отмечен красным маркером Задача: есть лабиринт, известна карта с точкой заброса робота и конечной точкой. Необходимо запрограммировать робота на перемещение в конечную точку образец
Изображение слайда
Слайд 8: Принцип решения задач
Декомпозиция задачи: разбить движение на элементарные действия (движение вперед, плавные повороты и т.д ) Составление программы Как обычно решают задачи?
Изображение слайда
Слайд 9: Принцип решения задач

Изображение слайда
Слайд 10: Принцип решения задач
Выделение повторяющихся действий и составление подпрограмм Принцип решения задачи: Декомпозиция задачи: разбить движение на элементарные действия (движение вперед, плавные повороты и т.д ) Составление программы Принцип решения задач
Изображение слайда
Слайд 11: Лабиринт
Вытащите первый блок «Подпрограмма» на сцену Назовите её «Вперед». Блок подпрограммы появится в палитре Двойным щелчком по подпрограмме перейдем к диаграмме её алгоритма
Изображение слайда
Слайд 12: Лабиринт
Поле лабиринта в 2 D модели 3 на 3 клетки. Составьте алгоритм для движения вперед из поля в поле У подпрограммы есть своя собственная 2 D модель. Чтобы её открыть нужно находится на вкладке подпрограммы Вернитесь на вкладку основной программы
Изображение слайда
Слайд 13: Лабиринт
Следующий элемент движения – поворот направо. Создайте новую подпрограмму «Направо» Разница в выполнение этого действия зависит от модели тележки (ведущие колеса спереди или сзади) Алгоритм: подъехать вперед (чтобы колеса оказались на центре клетки) повернуть направо на месте отъехать назад
Изображение слайда
Слайд 14: Лабиринт
Аналогично составляется алгоритм для поворота налево Осталось с помощью подпрограмм построить движение в конечную точку
Изображение слайда
Слайд 15: Правило правой руки
Задача: есть лабиринт с единственным выходом, необходимо выйти из него используя правило правой руки и вернуться ; Робот: базовая тележка с двумя датчиками расстояния Нарисуйте лабиринт в 2 D модели, аналогичный использованному в предыдущей задаче, но с одним выходом образец
Изображение слайда
Слайд 16: Правило правой руки
Алгоритм Есть ли справа стена? Повернуть направо Вперед Начало Есть ли впереди стена? Вперед Повернуть налево ожидание нет нет да да

Изображение слайда
Слайд 17: Правило правой руки
Алгоритм в TRIK Studio Потребуется подключить два ИК датчика расстояния Связующим блоком «условия» служит «нулевой таймер» Следует останавливать моторы в конце каждой подпрограммы

Изображение слайда
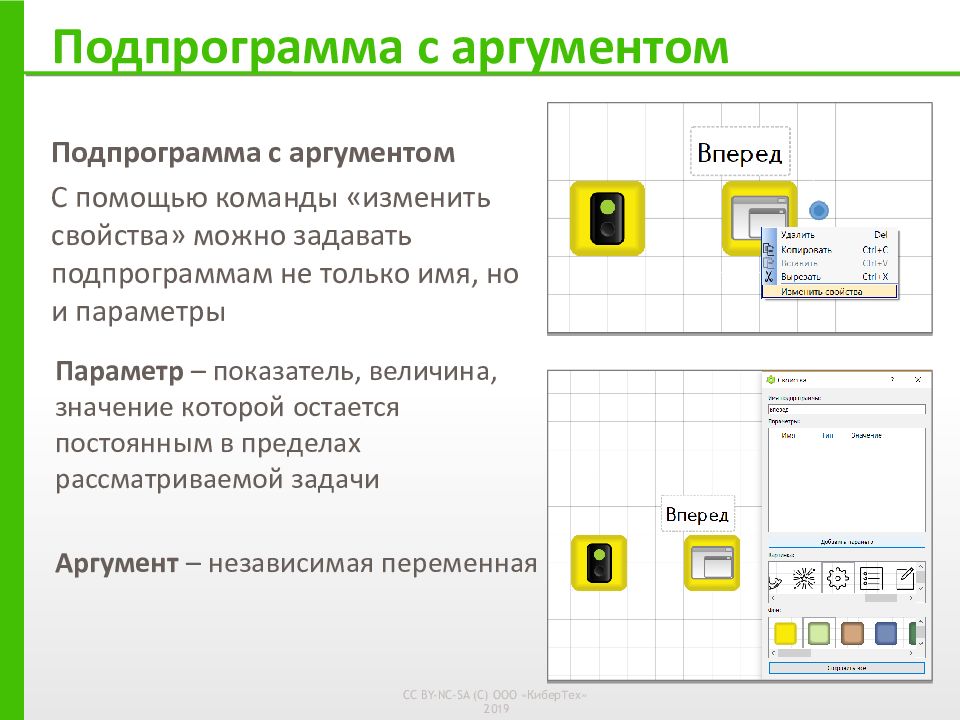
Слайд 18: Подпрограмма с аргументом
С помощью команды «изменить свойства» можно задавать подпрограммам не только имя, но и параметры Подпрограмма с аргументом Параметр – показатель, величина, значение которой остается постоянным в пределах рассматриваемой задачи Аргумент – независимая переменная
Изображение слайда
Слайд 19: Подпрограмма с аргументом
Зададим в подпрограмме «вперед» параметры пути ( s ) и перемещения ( v ). Теперь каждый раз при использовании подпрограммы вперед мы можем передавать разные значения в аргументах ( s ) и ( v ) Подпрограмма с аргументом Типы параметров : int – целый ; b ool – вещественный ; s tring — строка

Изображение слайда
Слайд 20: Задачи
Задача для самостоятельного решения 2: реализуйте разгон в течение 3х секунд и торможение в течение 2ух. Каждое действия оформите в виде подпрограмм Задачи Задача для самостоятельного решения 3: реализуйте движение по «бублику» с разгоном и торможением в 2 D модели и на реальном роботе. Используйте ИК датчик Задача для самостоятельного решения 1: реализуйте ППР с помощью точных перемещений, используя подпрограммы с аргументом
Источник: showslide.ru