
TRIK Studio — это среда визуального и текстового программирования образовательных конструкторов роботов.
Общие сведения об учебном программировании роботов
Сегодняшнее состояние школьного образования в сфере информатики можно считать сбывшимися пророчествами Сеймура Пейперта. Еще в 1967-ом году он предложил в качестве исполнителя «черепашку Logo», которая до сих пор повсеместно применяется для обучения школьников азам программирования. Не столь известным является тот факт, что наряду с виртуальным исполнителем, Пейперт в своих экспериментах применял механического робота-черепашку, который управлялся при помощи компьютера. Это обстоятельство помогало сделать процесс обучения программированию более увлекательным.
Задача программирования робота, сформированного из конструктора, считается более сложной, чем управление виртуальной «черепашкой», поскольку программы должны быть реализованы в терминологии мощностей моторов и величин сигналов с датчиков вместо фактических перемещений и поворотов. Поэтому при реализации внедрения подобных конструкторов в учебные процессы большое внимание должно быть уделено средствам их программирования. Причем достаточно популярными считаются визуальные языки, так как они являются более наглядными, чем текстовые языки и более простые в изучении.
Занятие №4 по TRIK Studio. Кегельринг только с ультразвуковым датчиком
Процесс программирования в подобных средах выполняется, как правило, «перетаскиванием» графических примитивов при помощи компьютерной мышки, иногда это позволяет программировать роботов даже детям, еще не умеющим читать. Популярность визуальных языков в образовательной робототехнике подтверждается количеством сред программирования учебных роботов, использующих такие языки.
Сегодня научная сфера образовательной робототехники является очень перспективной, о чем свидетельствует, к примеру, тот факт, что в течение последнего десятилетия практически все ведущие университеты мира занимались разработкой собственных решений. На основании подробного обзора всех ранее созданных сред можно сделать вывод о том, что невзирая на обширный набор инструментов в данной области, ни один из них не способен удовлетворить требованиям большинства образовательных учреждений. Практически все такие среды способны реализовать лишь самый общий и необходимый функционал (редактор визуальных диаграмм и возможность исполнения их на роботе с отладкой на компьютере или в автономном режиме). Тем не менее в них нет более специализированных средств обучения программированию, таких как, возможность генерации читаемого кода по визуальной диаграмме, позволяющей облегчить переход с визуального языка на текстовый, возможность отладки программы на виртуальном симуляторе робота или встроенные средства проверки правильности исполнения задания, что позволило бы автоматизировать часть обязанностей, входящих в компетенцию преподавателя.
«Программирование роботов в среде TRIK Studio»
Готовые курсовые работы и рефераты
Решение учебных вопросов в 2 клика
Помощь в написании учебной работы
Программирование роботов в среде TRIK Studio
TRIK Studio является средой визуального и текстового программирования образовательных конструкторов роботов. TRIK Studio возникла как продолжение проекта кафедры системного программирования СПбГУ QReal:Robots. В официальной версии присутствует поддержка конструкторов Lego Mindstorms NXT, Lego Mindstorms EV3 и ТРИК. Любой из этих конструкторов можно запрограммировать на одном из двух визуальных языков, а именно, на более простом, построенном на модели потока управления, или более сложном языке программирования потоков данных. А также можно программировать на одном из нескольких текстовых языков.
Знакомство с TRIK Studio
Программа на визуальном языке, то есть, визуальная диаграмма, обладает следующими режимами работы:
- Режим отладки на симуляторе.
- Режим отладки на компьютере с отправкой пакетов роботу по одному из имеющихся каналов (USB, Bluetooth, Wi-Fi).
- Режим генерации кодов на текстовом языке с дальнейшим автономным выполнением их на роботе.
В режиме отладки на симуляторе диаграмма должна быть интерпретирована на двумерной имитационной модели робота. Пользователям предоставляется возможность изобразить двумерную модель мира из стенок, цветных компонентов и разметки регионов.
Данная возможность, по замечаниям пользователей, представляется чрезвычайно удобной для первоначальной отладки программы перед каким-нибудь взаимодействием с роботом. Опыт применения показал, что в редакторе модели мира можно создавать очень много полей и полос препятствий, которые используются на соревнованиях по спортивной робототехнике. Наличие симулятора предоставляет возможность обучать пользователей программированию и кибернетике в образовательных учреждениях, не имеющих реальных роботов. Имеется также экспериментальная поддержка отладки при помощи трехмерного симулятора роботов V-Rep.
Процесс отладки на компьютере с отправкой команд роботу (в режиме интерпретации в терминах среды) удобен, поскольку позволяет отследить поведение программы на целевом устройстве в реальном масштабе времени. В режиме интерпретации возможно отследить величины переменных в соответствующем окне среды (аналогичном, к примеру, окну поддержки отладчика gdb в разных текстовых IDE), а, кроме того, строить в реальном масштабе времени графики величин сигналов с датчиков.
Режим генерации кода дает возможность перехода от визуального отображения программы к текстовому. Тестовый код может отображаться во встроенном редакторе qscintilla, который имеет возможности полноценного редактора кода (подсветка синтаксиса, автоматическое дополнение, подсветка скобок, отмена, повтор и так далее). В дистрибутиве среды имеются весь необходимый инструментарий для формирования и передачи программ на робота (набор кросскомпиляторов, WinSCP, Putty и так далее), поэтому процесс компиляции и взаимодействия с контроллером робота становится целиком прозрачным для пользователя. Необходимо отметить, что пользователи, выступающие в роли новичков, до определенного момента могут даже не догадываться о его существовании.
Источник: spravochnick.ru
Движение робота по контуру TRIK Studio Доцент Пустыльник

Управление объектом Уставка – желаемое значение (высота, расстояние и т. д. Регулятор – система, вырабатывающая управляющее воздействие на основе данных обратной связи Управляющее воздействие –сигнал, задающий новое состояние объекта Обратная связь – измеряемые параметры, подающиеся на регулятор
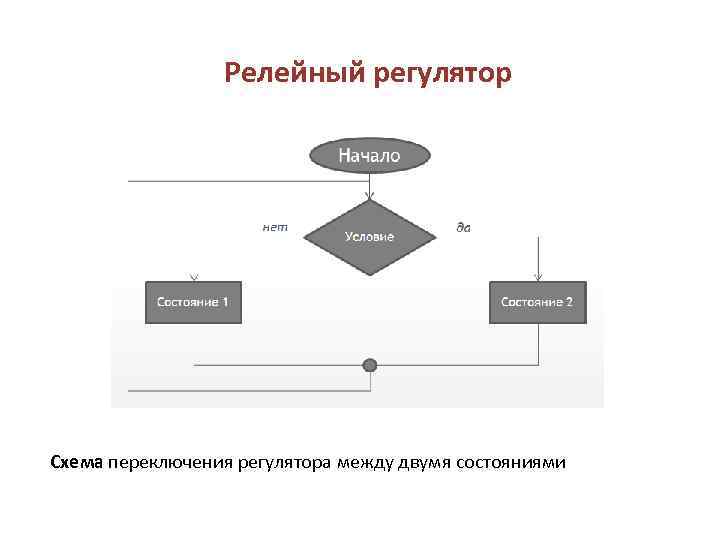
Релейный регулятор Схема переключения регулятора между двумя состояниями
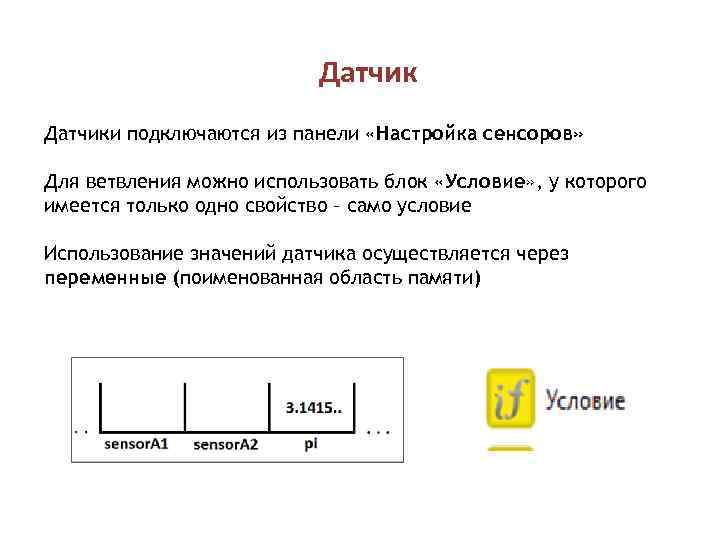
Датчики подключаются из панели «Настройка сенсоров» Для ветвления можно использовать блок «Условие» , у которого имеется только одно свойство – само условие Использование значений датчика осуществляется через переменные (поименованная область памяти)
Датчик (англ. sensor) При подключении датчиков к портам обычно используются: А 1, А 2 — инфракрасный датчик, (см) (переменные: sensor. A 1, sensor. A 2); А 3, А 4 – датчик касания, (1 или 0) (переменные: sensor. A 3, sensor. A 4); А 5, А 6 – датчик освещенности, (%) (переменные: sensor.
A 5, sensor. A 6) Рабочее расстояние для аналоговых датчиков (на реальном роботе): От 8 до 80 см — инфракрасный датчик; От 8 до 15 мм — датчик освещенности. Аналоговый датчик – вырабатывает аналоговый (непрерывный) сигнал, пропорционально изменению входной величины Бинарный датчик – имеет два состояния: включено/выключено Цифровой датчик – генерирует последовательность импульсов (двоичное слово)
Датчик (продолжение) При подключении датчиков к портам (A 1 -А 6) используется переменная sensor. A 1, к A 2 – sensor. A 2 и т. д. Ввод переменных осуществляется через блок «Функция» . Для объявления и инициализации новой переменной просто введите в свойства этого блока: имя_переменной = значение Пример 1. grey = 0 Пример 2. err=70 -5 Переменным можно присваивать другие переменные, если последние были объявлены и инициализированы ранее (u=5*err) Датчик света – аналоговый датчик для измерения освещенности. Показывает значения от 0 до 100.

Операторы Для задания различных условий роботу необходимо использовать операторы сравнения и логические операторы
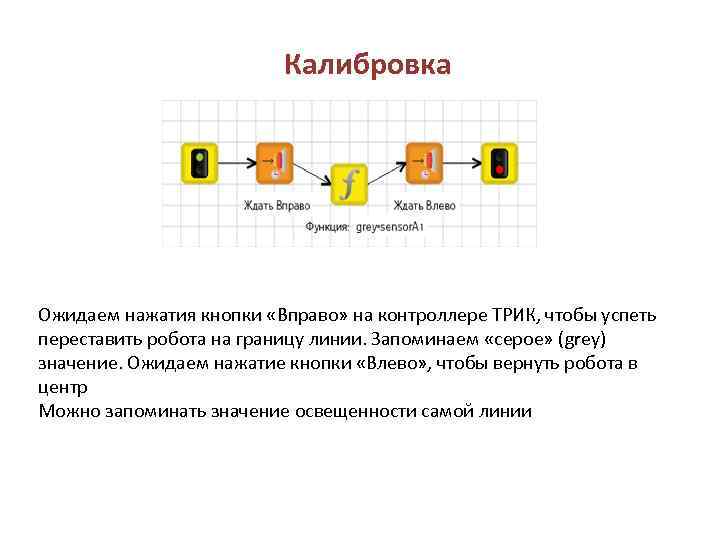
Калибровка Ожидаем нажатия кнопки «Вправо» на контроллере ТРИК, чтобы успеть переставить робота на границу линии. Запоминаем «серое» (grey) значение. Ожидаем нажатие кнопки «Влево» , чтобы вернуть робота в центр Можно запоминать значение освещенности самой линии
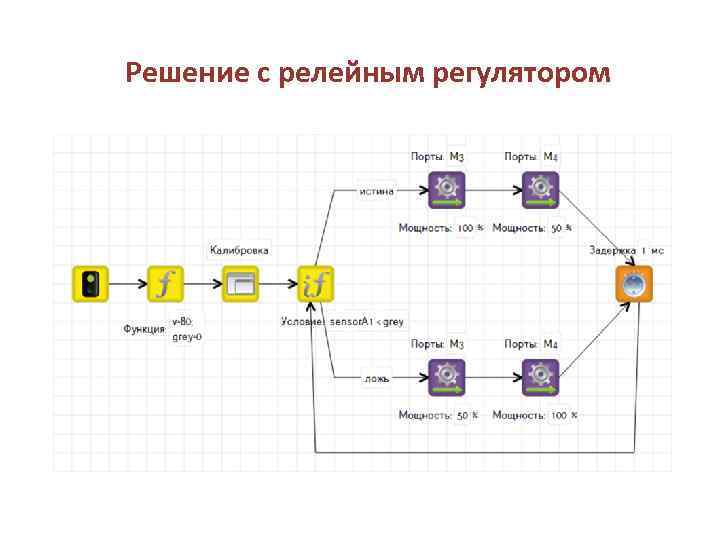
Решение с релейным регулятором
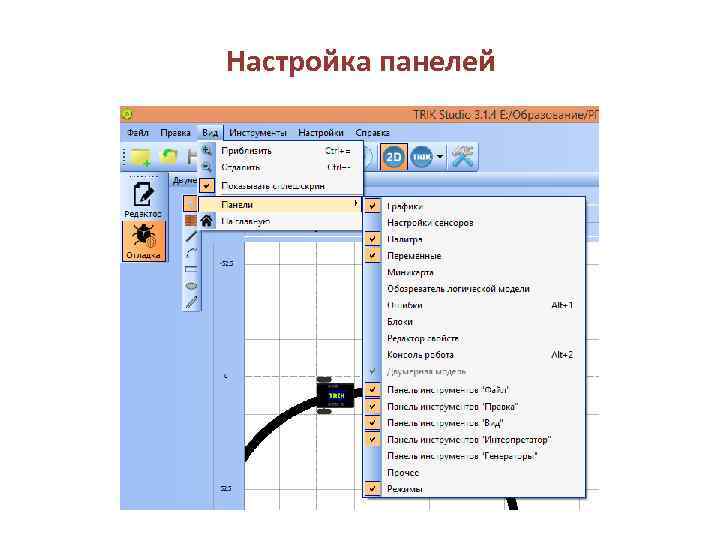
Кто понял, почему робот не поехал? 1. Толщина линии не должна быть менее 12 – тонкие линии датчик плохо отслеживает 2. Кнопки управления надо нажимать на панели ТРИК. А где она спрятана?
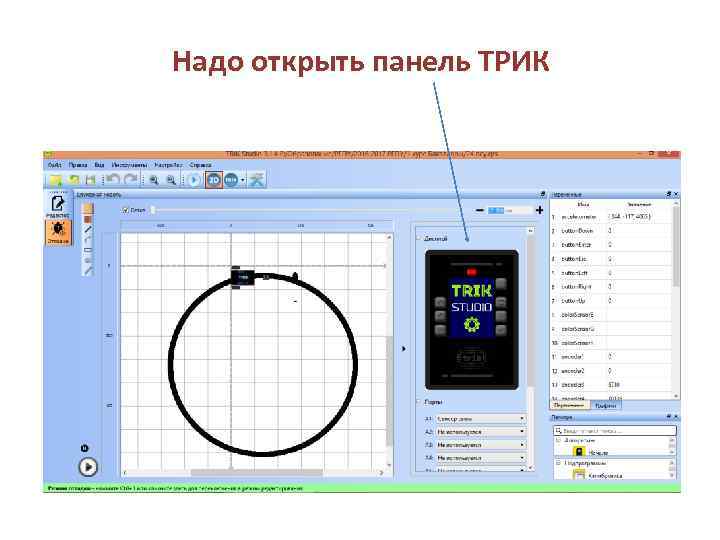
Надо открыть панель ТРИК
Источники информации 1. Сайт www. trikset. com 2. Платформа открытых уроков https: //stepik. org/explore/lessons 3. Датчики и микроконтроллеры https: //geektimes. ru/post/255116/ 4. О проектах ТРИК https: //github. com/trikset
Источник: present5.com
Конструкторы роботы
Разработка команды из Санкт-Петербурга, российский кибернетический конструктор ТРИК, появился в 2014 году. На сегодня он состоит из электронных блоков и металлических деталей (балок и панелей с перфорацией под М4 с шагом 10мм по типу Meccano) и полностью совместим с классическими советскими и российскими металлическими конструкторами. ТРИК предназначен для образования и творчества детей старше 12 лет. В его основе контроллер отечественной разработки, способный одновременно обрабатывать аудио и видеоинформацию, синтезировать речь, активировать навигацию, управлять модулями движения, обмениваться информацией с управляющим ПК по беспроводной сети.

В контроллере ТРИК размером 125х80х25 мм имеется 2 процессора – второй, периферийный предназначен для обработки видеосигнала. Такое решение разгрузило центральный процессор ARM926EJ-S с тактовой частотой 375 мГц и памятью 256 Мб. К контроллеру можно подключить до 4 двигателей напряжением 6-12В, 19 периферийных устройств, 2 порта видеодатчиков.
Имеется возможность подключения двух 26 контактных «щелевых» планок модулей расширения. Контроллер оборудован собственным цветным монитором 2,4” разрешением 320х240 пикс., встроенным динамиком мощностью 1 Вт, трёхосевым акселерометром, 3-х осевым гироскопом, аудиокодеками, конвертером и программируемыми кнопками. Имеются модули беспроводной связи Wi-Fi и Bluetooth, контроллер оборудован встроенными средствами защиты от перегрузки по силе тока. Электропитание моделей осуществляется от внешнего блока или аккумулятора напряжением 6-12В.

На сайте разработчика в открытом доступе выложены программные коды, библиотеки, оболочки, среда программирования TRIK Studio и шаблоны для печати пластиковых деталей конструктора на 3-D принтере. Программное обеспечение позволяет моделировать виртуальных роботов на экране ПК с помощью последовательности картинок, то есть процесс программирования является интерактивным. Имеется возможность программирования роботов LEGO NXT 2.0 и EV3, но с весьма ограниченными возможностями. Для управления моделями с мобильных устройств существует приложение TRIK Gamepad для Android, которое использует Wi-Fi подключение.

В 2017 году компания ТРИК реализует четыре набора конструктора. Первый, ТРИК Стартовый ценой около 39 тыс.руб., включает в себя контроллер, блок питания, камеру-глаз, два мотора-редуктора с энкодерами, датчики расстояния и касания, 3 колеса и 40 металлических деталей. Из него можно собрать роботизированную тележку или балансирующего робота.
Набор ТРИК Малый Образовательный стоит 50 тыс.руб. В него добавлены микрофон с кабелем, угловой сервопривод, 2 датчика для движения по линии, шестерёнки, оси, реечная передача, гусеницы, колёса и хвост манипулятора, а число металлических элементов увеличено до 80. Набор позволяет собрать минимум 3 модели – подъёмный кран, грузовик, робота-манипулятора. Комплектация позволяет собрать несколько авторских моделей с различными функциями, которые можно запрограммировать самостоятельно.

Набор ТРИК Образовательный адаптирован для использования в школах и кружках робототехники. В него добавлен инфракрасный датчик и светодиодная лента. Также в наборе присутствуют 2 сервопривода, 4 мотора, 4 «всенаправленных» омниколеса, хват для манипулятора, большой аккумулятор ёмкостью 4200 мАч. Стоит такая комплектация из 147 элементов около 70 тыс.руб.
Максимальная версия конструктора, ТРИК Учебная пара, предлагается за 114 тыс. руб. Она предназначена для образовательных целей и соревнований роботов. В наборе содержится свыше 200 деталей и электронных компонентов.

К преимуществам ТРИК можно отнести необычайную гибкость контроллера, простоту и наглядность программирования, возможность создания самых разнообразных роботов авторской конструкции и прочность металлического каркаса. Условными недостатками можно считать некую «незаконченность» роботов – висящие провода, открытые датчики, а также немалую цену. Однако все недостатки искупаются широкими возможностями для творчества. Данный конструктор больше адаптирован под юных энтузиастов робототехники, чем для обычных детей, любящих «поиграть в конструктор».
- ← Амперка (Amperka)
- Robo Wunderkind (Робо Вундеркинд) →
- История конструкторов
- О детских конструкторах
- Обзоры конструкторов
- Конструкторы роботы
- СОДЕРЖАНИЕ
Источник: www.fanclastic.ru