
Приветствую Вас на моем канале, посвященному разработке прикладного программного обеспечению для программируемых логических контроллеров и панелей оператора.
В прошлом обзоре мы создали проект в ТИА портал версии 15.1, а также рассмотрели документацию на основе которой будет вестись разработка прикладного программного обеспечения для контроллера.
Сегодня рассмотрим подробнее схему электрическую принципиальную, выделим в ней контроллер и его модули расширения, сравним каталожные номера оборудования в схеме и спецификации, а также создадим аппаратную конфигурацию в среде ТИА портал версии 15.1.
На втором листе схемы электрической принципиальной мы видим «корзину» контроллера. Она представляет собой механически закрепленную в одной плоскости в ряд оборудование контроллера и его сигнальных, функциональных, коммуникационных модулей, электрически связанных между собой коннекторами.
Корзина контроллера
В данной схеме указанно, что в качестве основного контроллера применяется ПЛК фирмы сименс, линейки S7-300. Сигнальные модули к нему и блок питания.
S7-1200. Пример программы для конвейера
Также на схеме указаны источники питания различных цепей. Каждое оборудование на схеме имеет условное обозначение, наименование производителя, каталожный номер и наименование и тип применяемого модуля. Те же данные должны фигурировать и в спецификации.
В спецификации на первом и втором листе можно проследить соответствие указанных заказных номеров оборудования на схеме электрической принципиальной. Следовательно, на основании схемы будем создавать аппаратную конфигурацию в ТИА портал версии 15.1.
Открываем проект, созданный в прошлом обзоре.
В дереве проекта необходимо развернуть меню, если оно свернуто. Как можно увидеть в нашем проекте еще нет ни ПЛК, ни панелей оператора, ни других устройств.
Давайте теперь добавим ПЛК станцию и заполним его аппаратную конфигурацию.
Щелкаем по пункту меню Эд Нью Девайс в дереве каталога проекта. В появившимся окне выбираем ТАБС «контроллерс». Далее находим из списка серию S7-300, раскрываем список и ищем наш контроллер.
Как видно здесь два контроллера на выбор, они имеют разные каталожные номера. Обращаемся к проекту и уточняем номер. Согласно нашего номера, на выбор нам представляют контроллер с двумя версиями прошивки. Выбираем тот что наш. Кстати, номер версии прошивки контроллера указано на его корпусе.
Версия прошивки указана на корпусе
Если же нам неизвестна версия прошивки. То можно логически рассуждать, когда закупалось оборудование, закупилось ли на момент написания ПО оно вообще. Какой срок реализации проекта, если разработка ПО входит в состав рабочей документации, а реализация планируется в следующем году или еще дольше. То здесь необходимо выбирать контроллер с более высокой версией прошивки.
Если же наоборот, контроллер приобретен давненько, а написать ПО решили только сейчас, или нужно модернизировать его, а исходников нет и пишем с нуля, или на аутсорсинге выполняем работу, то необходимо уточнить версию прошивки, установленного контроллера. Ведь программа, написанная для более высокой версии прошивки, не сможет корректно выполнятся на ПЛК с низшей версией. Здесь нужно быть осторожным.
В нашем случае, ПЛК еще не закуплен, он будет приобретаться после передачи заказчику всех документов, в том числе и прикладного программного обеспечения для ПЛК. В этом случае применяем версию прошивки наиболее высокой версии.
Добавляем контроллер простым нажатием кнопки ОК. Создается корзина контроллера, в нее будем добавлять сигнальные модули.
В правой части имеется хардвей каталог, из которого необходимо выбирать и добавлять модули расширения.
Начнем заполнять корзину согласно схемы электрической принципиальной. Первым модулем идет сигнальный входной модуль аналоговых сигналов. Ищем его по названию, сравнивая каталожный номер со схемой.
Добавляем его простым перетаскиванием в корзину. Повторяем процедуру. Так как у нас таких модулей два.
Поиск модуля можно осуществлять в строке поиска. Вбиваем каталожный номер. Нужный нам модуль разворачивается и выделяется автоматом. Перетаскиваем его, также два раза.
Поиском находим модули дискретного ввода и вывода. Добавляем в корзину.
Также можно добавить и сам блок питания в корзину. Находим по каталожному номеру и добавляем.
Дальше необходимо конфигурировать сами сигнальные модули и контроллер. Это будет в следующем обзоре. Предлагаю вам пока самостоятельно ознакомиться со всеми имеющимися аппаратными настройками контроллера и модулей.
На сегодня у меня все. Дополнительные материалы и описание вы найдете под видео.
В комментариях пишите интересующие вопросы. А также не забываем делится данным материалом и ставить лайки.
Друзья, до следующих встреч.
Источник: dzen.ru
Уроки TIA Portal, STEP7 и HMI
В TIA Portal Разработать программу PLC и HMI управления дискретной задвижкой.
Решение
Для примера рассмотрим задвижку с физическим интерфейсом:
| Открыть* | Управляющие входы настраиваем на потенциальный режим работы |
| Закрыть* | |
| Авария (Trip) | Переводит задвижку в безопасное состояние, которое выбирается с помощью настроек |
| Стоп | Останавливает привод задвижки, если входы Открыть и Закрыть настроены на импульсный режим работы |
| Открыто* | Нормально-открытые контакты концевых выключателей |
| Закрыто* | |
| М1 | Многофункциональные выходы |
| М2 | |
| Готовность* | Готовность = дистанционное управление + отсутствие неисправности |
| Неисправность |
* Сигналы со звёздочкой войдут в интерфейс ПЛК.
Входы ПЛК физически связаны с выходами задвижки для получения информации о состоянии задвижки), а выходы ПЛК физически связаны с входами задвижки для управления состоянием задвижки.
| Открыто |
| Закрыто |
| Готовность |
| Открыть |
| Закрыть |
| Программные кнопки | ||
| Ручной режим | Зелёный фон, если режим активен | Задвижкой управляет оператор через HMI |
| Автоматический режим | Задвижка управляется автоматически программой ПЛК | |
| Открыть | Задвижка открывается/закрывается при коротком нажатии на кнопку | |
| Закрыть | ||
| Стоп | Движение задвижки прекращается | |
| Сброс | Сброс ошибки «Превышено время хода» | |
| Уставки | ||
| Время полного хода задвижки | ||
| Индикаторы состояния | ||
| Местный режим | Зелёный фон, если режим активен | Выбирается с помощью переключателя режимов на самой задвижке Дистанционный-Местный. Задвижкой управляет оператор с помощью кнопок Открыть-Закрыть на самой задвижке. |
| Среднее положение задвижки | Серый | Не сработал ни один конечный выключатель |
| Задвижка открывается | Мигает: белый-серый | |
| Задвижка закрывается | Мигает: чёрно-серый | |
| Задвижка открыта | Белый | |
| Задвижка закрыта | Чёрный | |
| Превышено время хода задвижки | Жёлтый | Время открытия или закрытия задвижки превысило уставку времени хода |
| Авария концевых выключателей | Красный | Одновременно сработали оба концевых выключателя |
Входы графического интерфейса получают информацию о состоянии с выходов программного блока управления задвижкой, а выходы HMI управляют задвижкой через входы программного блока.
Алгоритм управления задвижкой
Задвижка управляется с местного пульта (Local) или дистанционно от ПЛК (Remote). Если полевой оператор переводит переключатель режима работы на местном пульте управления в положение «Дистанционный режим», то панельный оператор может выбрать с помощью HMI один из двух дистанционных режимов управления задвижкой: ручной или автоматический.
В дистанционном ручном режиме задвижка управляется панельным оператором с помощью программных кнопок на фейсплате HMI, в дистанционном автоматическом режиме задвижка управляется по программе ПЛК.
Если в автоматическом режиме задвижка открывается или закрывается дольше времени, заданного уставкой «Время полного хода задвижки», то выдаётся предупредительное сообщение «Превышено время хода задвижки».
Если одновременно сработали оба концевых выключателя, то выдаётся аварийное сообщение «Авария концевых выключателей».
-
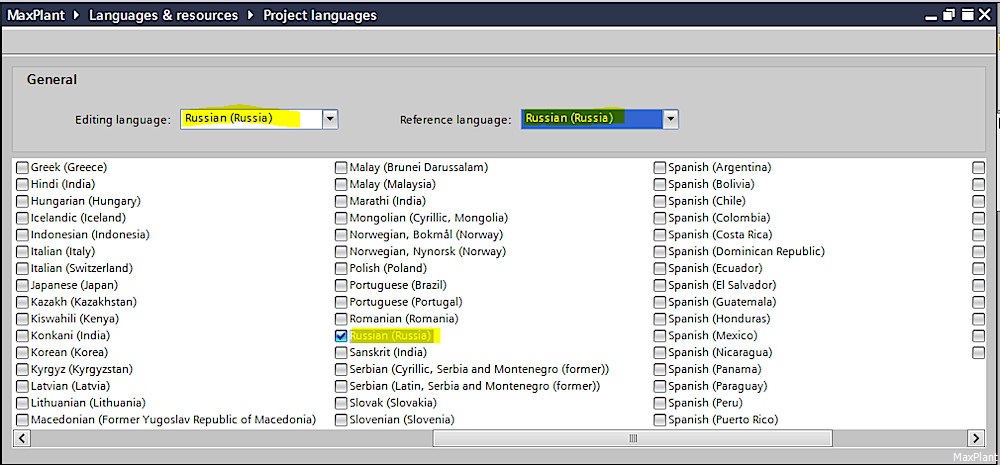
Выбираем язык проекта:
Tools > Project languages
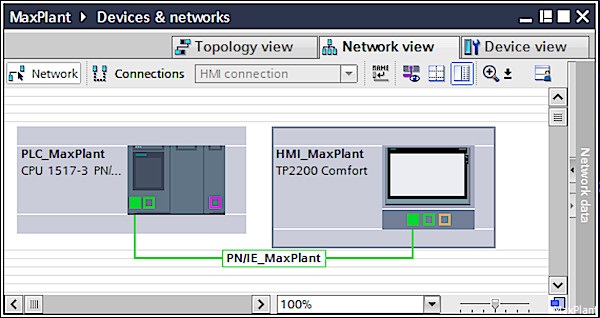
В редакторе Device Configuration конфигурируем контроллер S7-1500 и панель оператора:
| Краткое описание | Артикул | |
| 1 | CPU 1517-3 PN/DP | 6ES7 517-3AP00-0AB0 |
| 2 | DI 16x24VDC HF | 6ES7 521-1BH00-0AB0 |
| 3 | DQ 8x24VDC/2A HF | 6ES7 522-1BF00-0AB0 |
| 4 | TP2200 Comfort | 6AV2 124-0CX02-0AX0 |
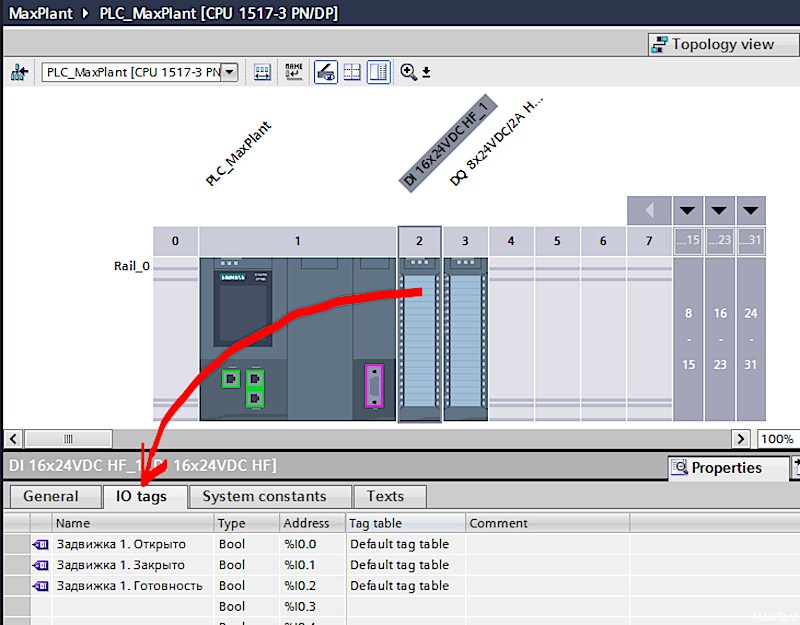
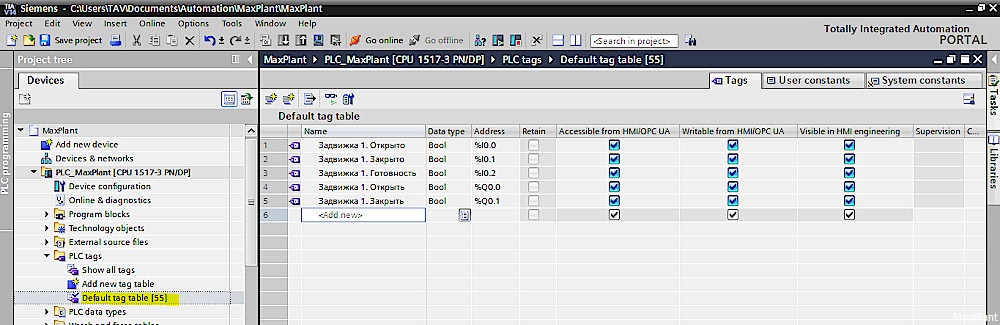
Присваиваем символьные имена тегам дискретных входов ПЛК:
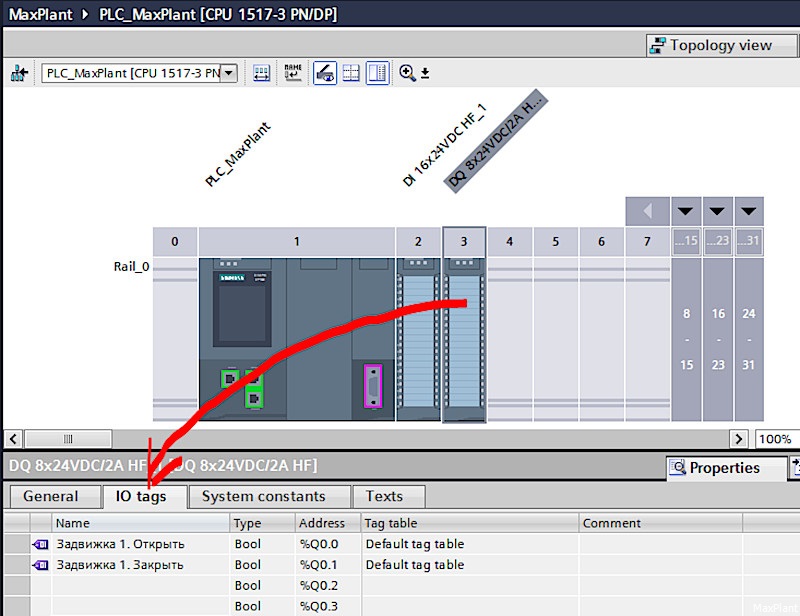
Присваиваем символьные имена тегам дискретных выходов ПЛК:
В результате получаем таблицу ПЛК-тегов:
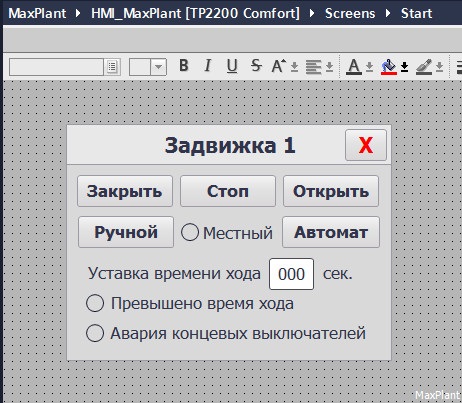
В редакторе экранов панели оператора создаём новый экран с именем Start и конфигурируем графический HMI интерфейс управления задвижкой (пока без привязки к тегам):
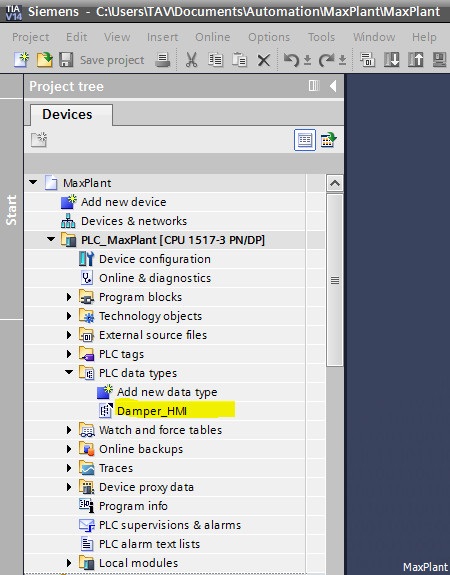
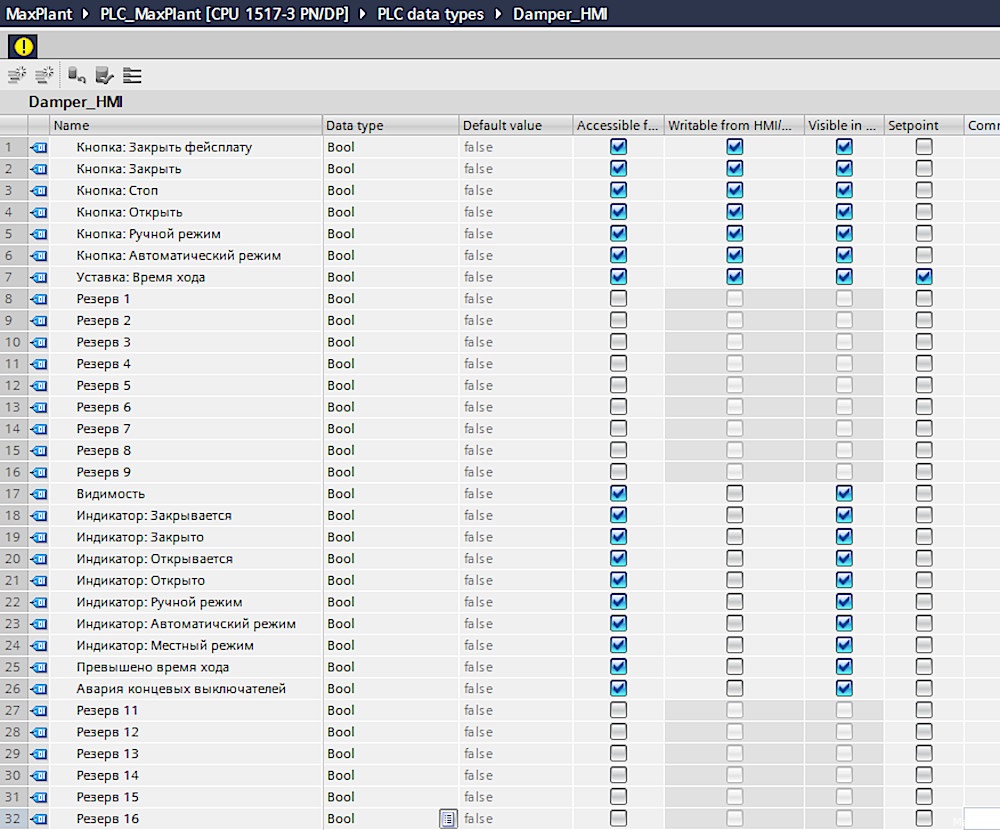
Создаём тип данных PLC data type с именем Damper_HMI, который пригодится для создания фейсплаты HMI задвижки:
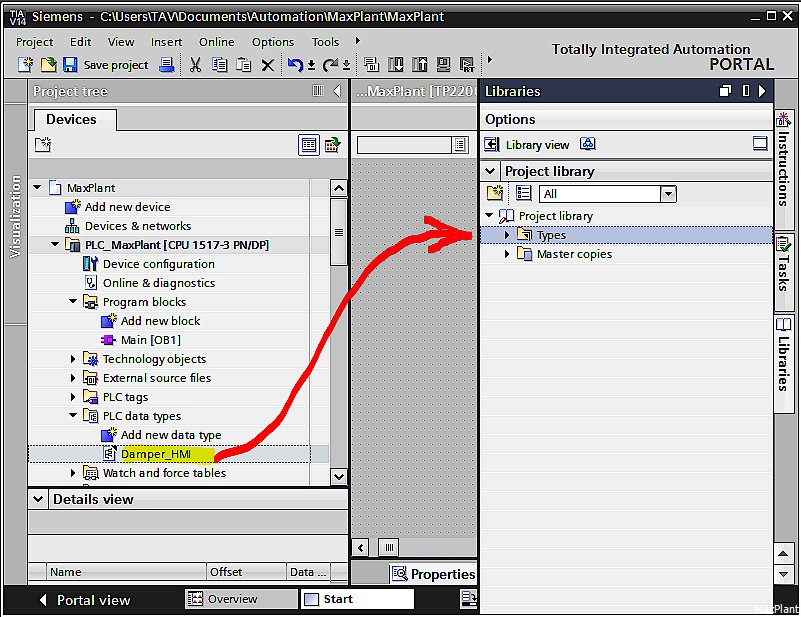
Генерируем глобальный блок данных, через который HMI будет обмениваться данными с программным функциональным блоком:
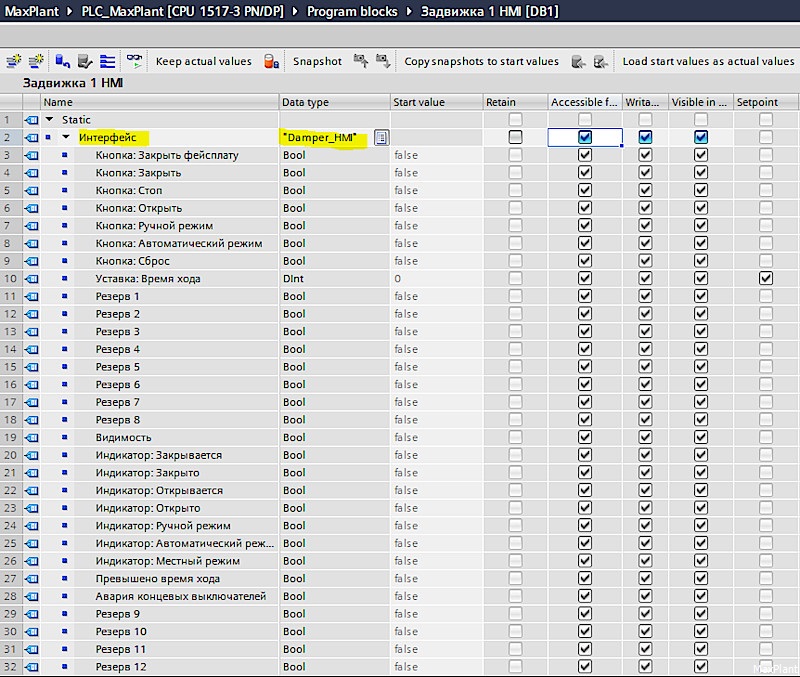
Добавляем в блок данных один тег с именем «Интерфейс» и структурным типом Damper_HMI:
-
Тег «Интерфейс» состоит из двух слов по 16 бит:
- Данные ввода HMI задвижки передаются в первое слово
- Данные вывода HMI задвижки передаются из второго слова
- создание фейсплаты HMI задвижки
- программирование управления задвижкой.
Источник: www.maxplant.ru
Контроллер YASKAWA MICRO, как клиент Modbus TCP

YASKAWA VIPA Controls контроллер MICRO как клиент (Мастер) Modbus TCP
Видео презентация ПЛК MICRO:
Для начала работы в TIA Portal v14 (Siemens AG) необходимо скачать конфигурационные файлы (GSDML) и библиотеки Modbus с сайта YASKAWA VIPA Controls. Распакуйте скачанные файлы в рабочую папку.
Конфигурирование MICRO в TIA Portal
Запустите программный пакет TIA Portal, после перейдите в Project view. Выберите в Options ‘Install general station description file (GSD)’. Перейдите в рабочую папку и выберите для установки требуемый файл GSDML. По завершении установки, будет произведено автоматическое обновление каталога оборудования и TIA Portal закроется.
Для того, чтобы компоненты VIPA отображались, необходимо отключить «Filter» в каталоге оборудования TIA Portal. В конфигураторе контроллер MICRO может быть выбран в Other field devices > PROFINET > IO > VIPA GmbH > VIPA MICRO PLC.
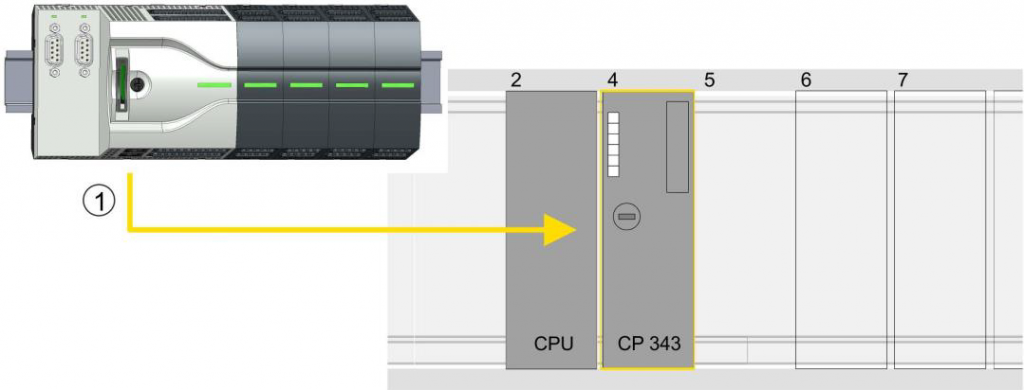
Стойка ПЛК в ПО TIA Portal
Для добавления контроллера MICRO в проект перейдите в Project tree и выбирите ‘Add new device . ’. Так контроллеры VIPA Controls эмулируют контроллеры S7-300, для работы с MICRO, выберите в диалоговом окне ввода модуль ЦПУ SIMATIC S7-300 > CPU 314C-2 PN/DP (314-6EH04-0AB0 V3.3). После перейдите в Project area к ‘Network view’ и перетащите из раздела ‘Other field devices > PROFINET > IO > VIPA GmbH > VIPA MICRO PLC’ контроллер в поле Network view,и подключив ее виртуально к ЦПУ S7 через PROFINET.
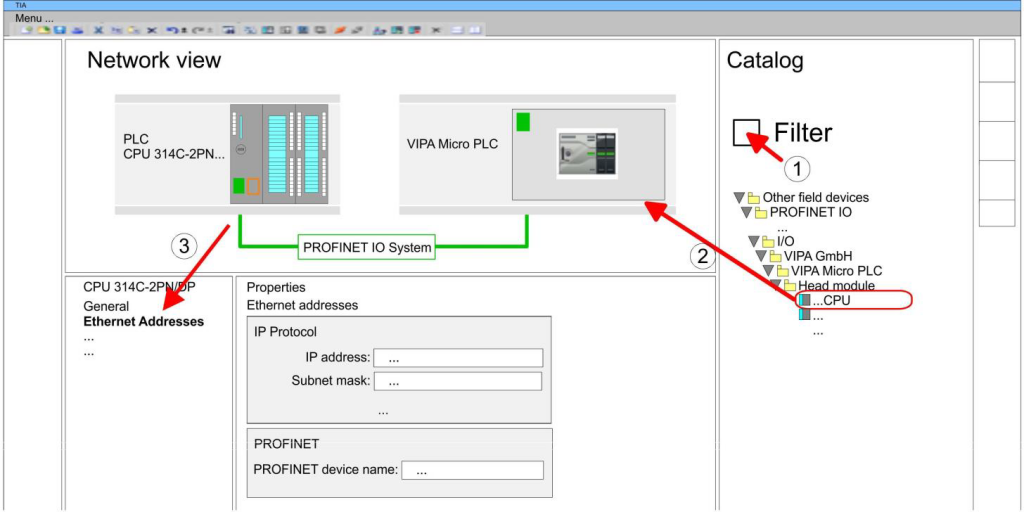
Конфигуратор сетевых подключений Network view и добавление MICRO
В Network view кликните по линии PROFINET модуля Siemens CPU и введите требуемое значение IP-адреса в поле ‘Ethernet address’ окна ‘Properties’ раздела ‘IP protocol’. Введите в поле ‘PROFINET device name’ окна ‘PROFINET’ уникальное (в рамках подсети Ethernet) имя сетевого устройства.
Настройка порта Ethernet PG/OP MICRO
Выберите в Network view устройство ввода/вывода ‘VIPA MICRO PLC’ и перейдите в Device overview. В окне станции устройства PROFINET IO ‘VIPA MICRO PLC’ модуль ЦПУ будет размещен в слоте 0. Для конфигурирования порта Ethernet PG/OP поместите в слот 4 стойки модуль Siemens CP 343-1 (6GK7 343-1EX30 0XE0 V3.0). Двойным кликом по CP 343-1EX30 откройте диалоговое окно ‘Properties’ и в поле «Ethernet address» введите требуемый IP-адрес. Предварительно необходимо получить у администратора сети допустимый IP-адрес.
Настройка порта Ethernet PG/OP MICRO
Подключение библиотек в ПО TIA Portal
Распакуйте ZIP-файл с библиотекой VIPA Modbus в рабочий каталог Siemens TIA Portal.
Перейдите в Project view в своем проекте и выберите вкладку «Libraries» из вертикального меню справа, выберите «Global library» и потом «Open global library», перейдите в рабочий каталог и загрузите файл . _TIA.al1x. Скопируйте нужные блоки из библиотеки в раздел «Program blocks» менеджера проектов Project tree активного проекта. Теперь специализированные функциональные блоки VIPA готовы для использования в пользовательской программе проекта.
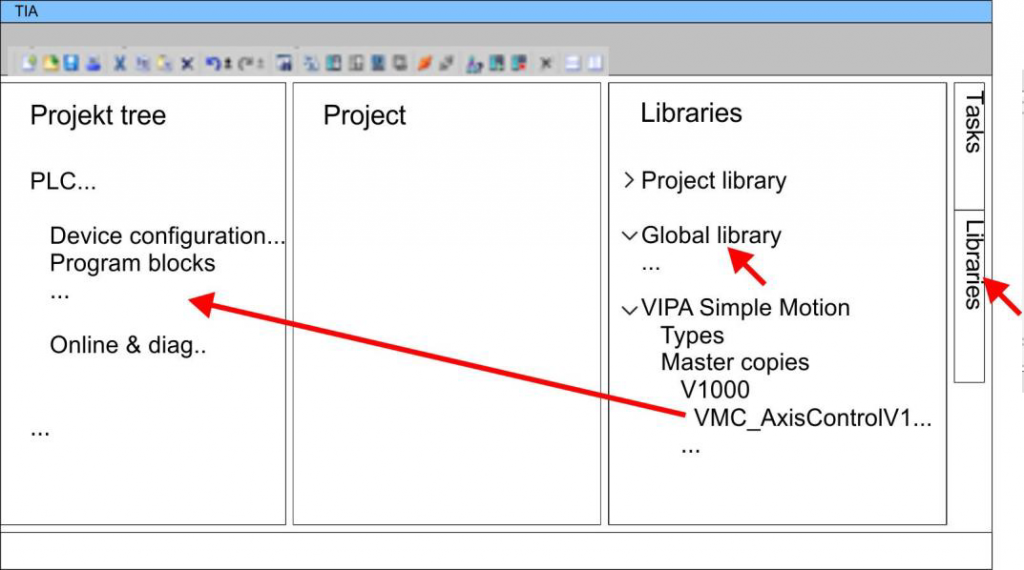
Добавление библиотек в проект в ПО TIA Portal
Программа клиента Modbus TCP
Для организации связи по Modbus TCP используются функциональные блоки, разработанные YASKAWA VIPA Controls для своих контроллеров. Их мы и будем использовать в нашей программе.
FB 70 — TCP_MB_CLIENT – этот функциональный блок позволяет использовать порт Ethernet PG/OP в качестве клиента Modbus/TCP.
| Параметры вызова Наименование | Тип переменной | Тип данных | Описание |
| REQ | ВХОД | BOOL (Двоичное значение) | Запуск работы блока по переходу 0-1. |
| ID | ВХОД | WORD (16-разрядное значение) | ID из TCON. |
| MB_FUNCTION | ВХОД | BYTE (Байт) | Modbus: Код функции. |
| MB_DATA_ADDR | ВХОД | WORD (16-разрядное значение) | Modbus: Начальный адрес или код подфункции. |
| MB_DATA_LEN | ВХОД | INT (Целое) | Modbus: Количество регистров/бит |
| MB_DATA_PTR | ВХОД | ANY (любой) | Modbus: Буфер данных (допустима только область флагов или блок данных с типом данных BYTE) при использовании функций с кодами 03h, 06h и 10h. |
| DONE * | ВЫХОД | BOOL (Двоичное значение) | Работа блока завершена без ошибок. |
| BUSY | ВЫХОД | BOOL (Двоичное значение) | Задание выполняется. |
| ERROR * | ВЫХОД | BOOL (Двоичное значение) | Работа блока завершена с ошибкой — Параметр STATUS содержит информацию об ошибке. |
| STATUS * | ВЫХОД | WORD (16-разрядное значение) | Расширенная информация о состоянии и об ошибках. |
| *) Параметр сохраняет свое состояние до следующего вызова FB | |||
| Параметры DB Наименование | Тип переменной | Тип данных | Описание |
| PROTOCOL_TIMEOUT | STAT | INT (Целое) | Время блокировки до того, как пользователь может отменить активное задание. Значение по умолчанию: 3 c |
| RCV_TIMEOUT | STAT | INT (Целое) | Контрольное время для задания. Значение по умолчанию: 2 с |
| MB_TRANS_ID | STAT | WORD (16-разрядное значение) | Modbus: Начальное значение для идентификатора транзакции. Значение по умолчанию: 1 |
| MB_UNIT_ID | STAT | BYTE (Байт) | Modbus: Идентификация устройства. Значение по умолчанию: 255 |
Обратите внимание на следующее:
- Параметры вызова должны быть заданы при вызове блока. Кроме параметров вызова имеются также параметры, содержащиеся в DB.
- Предварительно коммуникационное соединение должно быть инициализировано с помощью FB 65 (TCON).
- Для использования блока требуются FB 63 (TSEND) и FB 64 (TRCV).
- В процессе исполнения задания DB блокируется для других клиентов.
Обратите внимание на то, что в процессе исполнения задания изменение состояния входных параметров не воспринимается.
Исполнение задания завершается или отменяется при одном из следующих условий:
- DONE = 1 (исполнение без ошибки);
- ERROR = 1 (исполнение с ошибкой);
- Превышение интервала RCV_TIMEOUT;
- REQ = FALSE после истечения времени PROTOCOL_TIMEOUT.
Если REQ сбрасывается до того, как установлен выход DONE или ERROR или истекло время PROTOCOL_ TIMEOUT, на выходе STATUS будет установлено значение 8200h. При этом текущее задание будет по-прежнему исполняться.
С помощью функции 03h с сервера Modbus/TCP должны быть считаны 100 регистров, начиная с адреса 2000, и сохраняться в области памяти флагов с начальным адресом MB200. Коды ошибок при их возникновении должны быть сохранены.
Пример программного кода
CALL FB 65 , DB65 REQ :=M100.0 ‘ Вызов FB 65 (TCON) для соединения с сервером
ID :=W#16#1
DONE :=M100.1
BUSY :=
ERROR :=M100.2
STATUS :=MW102 ‘ Если соединение с сервером отсутствует, то содержит код 7000h
CONNECT :=P#DB255.DBX 0.0 BYTE 64
UN M 100.2
SPB ERR1
L MW 102
T MW 104
ERR1: NOP 0 U M 100.1
R M 100.0
CALL FB 70 , DB70 ‘ Вызов блока обработки данных клиента Modbus/TCP
REQ :=M101.0
ID :=W#16#1
MB_FUNCTION :=B#16#3 MB_DATA_ADDR:=W#16#7D0 MB_DATA_LEN :=100
MB_DATA_PTR :=P#M 200.0 BYTE 200 DONE :=M101.1
BUSY :=
ERROR :=M101.2
STATUS :=MW106
UN M 101.2
SPB ERR2
L MW 106
T MW 108 ‘код 0000h – задание выполнено, 7004h FB готов к выполнению нового запроса, другие коды это ошибки
ERR2: NOP 0
U M 101.1
R M 101.0
При включении бита M100.0, если M100.0 автоматически сбрасывается, то это означает, что соединение установлено и ячейка памяти MW108 в этом случае содержит код 7004h.
При включении бита M101.0, посылается запрос Modbus и ожидается ответ. В случае если M101.0 сбрасывается автоматически, задание исполнено без ошибок, а считанные данные сохранены в ЦПУ в области памяти флагов, начиная с байта 200. MW108 содержит код 7004h, что сигнализирует о готовности к выполнению нового запроса. Если M101.0 не сбрасывается автоматически, а MW108 возвращает значение, отличное от 0, то это означает наличие ошибки обмена. Причину ошибки можно определить с помощью кода в MW108 (например, MW108 = 8382h, если начальный адрес 2000 отсутствует на сервере).

YASKAWA VIPA Control контроллер MICRO получил награду IF Award 2018
- О КОМПАНИИ
- Достижения компании
и благодарственные
письма
- РЕШЕНИЯ
- Станкостроение
- Упаковочная промышленность
- Общее машиностроение
- Пищевая промышленность
- ОБОРУДОВАНИЕ
- Приводная техника
- Системы управления
- Роботы
- Комплексные решения
- Редукторы
- Специальные датчики
- Краткие каталоги
Источник: www.cospa.ru