
Следует подчеркнуть, что выявление места неисправности требует, как правило, более высокой квалификации радиомеханика (чем контроль работоспособности аппаратуры).
Для определения технического состояния РЭА (исправное, неисправное) используются два способа:
1) воздействие тестовыми сигналами на входные и промежуточные точки аппаратуры и анализ отклика на них;
2) анализ с помощью контрольно-измерительной аппаратуры (КИА) выходных и промежуточных сигналов в реальных условиях работы аппаратуры. Оба способа можно представить в виде
алгоритма диагностики состояния РЭА (рис. 3.1). Основные шаги алгоритма следующие:
- 1) контроль технического состояния аппаратуры;
- 2) проверка параметров для выявления соответствия номинальным значениям;
- 3) устранение неисправного состояния;
- 4) послеремонтный контроль.
Алгоритм диагностики состояния РЭА отличается высокой экономичностью и поэтому находит широкое применение. Число шагов и структура алгоритма зависят от конфигурации путей прохождения сигналов в блоке обработки сигнала. Различают последовательное, последовательнопараллельное и параллельное прохождение сигналов.
Эффективность поиска багов в коде (разные методы)
В процессе эксплуатации на основании методик и разрабатываемых алгоритмов, приводимых в паспортной документации, эксплуатирующий персонал производит оценку работоспособно-
сти или отыскание неисправностей. Главная цель таких алгоритмов – минимальные затраты по времени и аппаратуре. Применять такие алгоритмы возможно и на производстве – в отделах технического контроля в процессе диагностики изготовленной аппаратуры. Данная методика входит в состав испытаний и служит для отбраковки или приемки изделий. На этапе эксплуатации – для оценки работоспособности аппаратуры.

Рис.3.1 Алгоритм диагностики БРЭА по состоянию
1 Диагностика – процесс контроля некоторых выходных параметров аппаратуры и сравне-
ние их с номинальными значениями параметров и их допусками (производственными или эксплуа-
тационными). Обязательным условием диагностики является подача на вход (имитация) всех вход-
ных воздействий, режимов и сигналов в соответствии с паспортной документацией. В процессе раз-
работки алгоритма (последовательности) диагностики первыми в списке должны оказываться те
выходные параметры, информация о величине и соответствии номинальным у которых потребует:
А) минимум аппаратурных затрат
Б) минимум времени на их исследование
В) даст заключение о работоспособности максимального числа внутренних блоков и о том, что сигналы между ними – номинальные.
Цель диагностики – установление факта наличия неисправности перед отправкой в ремонт или годности изделия после ремонта.
Методика проведения диагностики может быть представлена в различных вариантах: табличном или алгоритмическом.
7 ОШИБОК НЕОПЫТНЫХ РЕКРУТЕРОВ. ПОИСК И ПОДБОР ПЕРСОНАЛА | +18
2. Поиск неисправностей – последовательность действий для отыскания отказавшего элемента.
Главная цель – наикратчайшим путем отыскать неисправный элемент. Как и в случае с диагностикой используют табличный (текстовый) или алгоритмический способы представления алгоритма по ремонту

Рис 3.6 Алгоритм поиска неисправности блока питания телевизора
Для расчета последовательности диагностики и отыскания неисправности используется программа TOTEX v1.5.9.exe
Рис 3.9 Данные о программе
Для ее использования следует выполнить следующие шаги (Рис 3.10 )
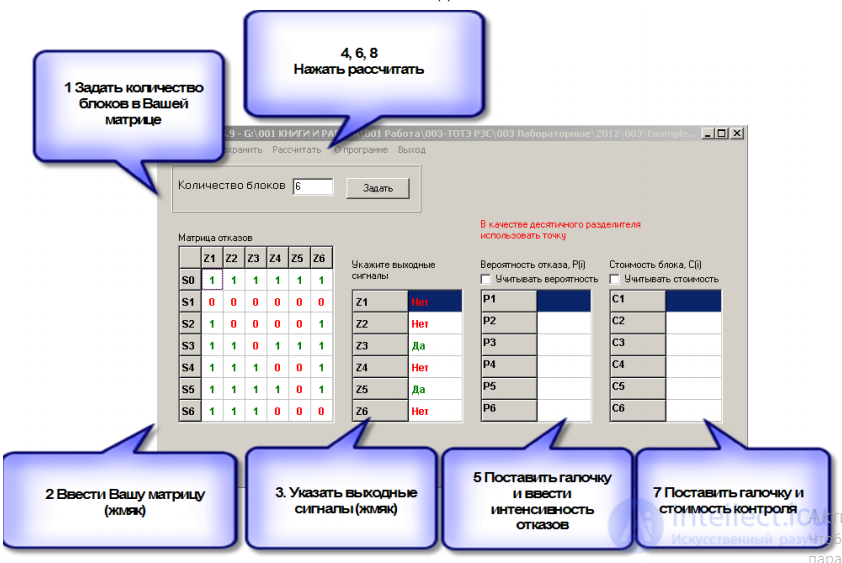
Рис 3.10 Порядок использования программы
ОБРАТИТЕ ВНИМАНИЕ! Расчет повторяется трижды. По их окончании их следует сравнить и сохранить (Рис 3.11) (в закладке сохранить – экспорт в *bmp).
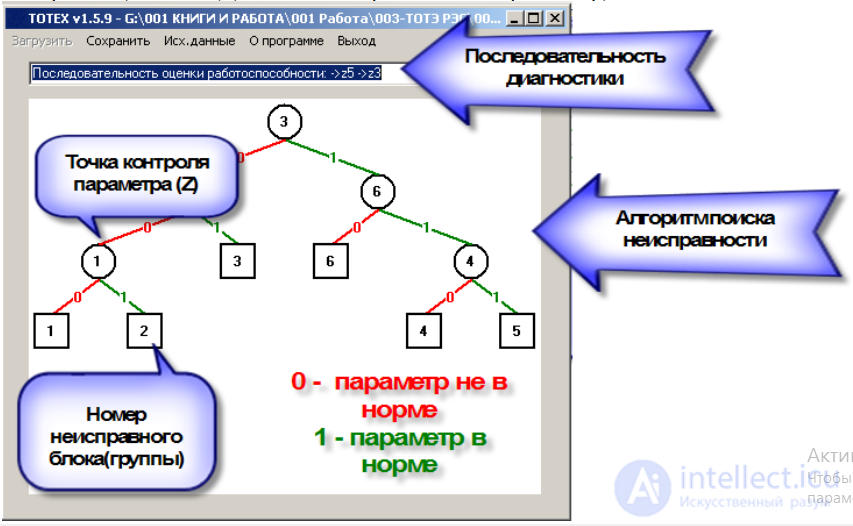
Рис 3.11 Полученные данные
Преобразовать (адаптировать) выведенный алгоритм в форму на примере, приведенном ниже
на рисунке . Об этом говорит сайт https://intellect.icu . Рис 3.12
Правила оформления алгоритмов можно найти в литературе Электротехнические чертежи и
схемы(Александров 1990) стр 237
Задание 1. Для заданной функциональной модели составить таблицу состояний
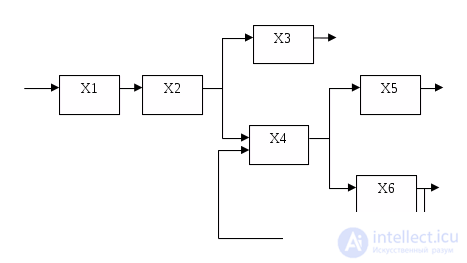
Рис.1
Таблица 1
Источник: intellect.icu
Методы использования диагностической информации;
При построении алгоритмов (программ) поиска неисправностей различают последовательный, комбинационный и комбинационно-последовательный методы использования диагностической информации.
При последовательном методе информация о техническом состоянии отдельных функциональных элементов диагностируемого объекта вводится в систему контроля и диагностики, в том числе и в автоматизированные системы контроля, и логически обрабатывается последовательно. При последовательном методе использования диагностической информации программа поиска неисправностей может быть жесткой или гибкой.
Жесткой называется программа поиска, когда выходные параметры функциональных элементов контролируются в строгой, заранее определенной последовательности независимо от результатов их контроля.
При комбинационном методе использования диагностической информации результаты контроля логически обрабатываются только после накопления информации обо всех параметрах диагностируемой аппаратуры, при этом применяется матрица поиска неисправностей рассмотренная раньше.
Комбинационно-последовательный метод предусматривает последовательную обработку информации, получаемой в результате одновременного контроля нескольких из всей совокупности контролируемых параметров диагностируемой аппаратуры.
Выбор того или иного метода использования информации о техническом состоянии диагностируемой аппаратуры обусловлен структурой объекта диагностики и требуемой глубиной поиска неисправностей. Он накладывает определенные требования на принципы построения и структуру системы контроля и диагностики.
Вид алгоритма (программы) поиска неисправностей существенно влияет на эффективность процесса контроля и диагностики. При разработке алгоритма поиска обычно решают две задачи:
· определяют наилучший набор контролируемых параметров;
· получают наилучшую последовательность изменения контролируемых параметров.
Рассмотрим наиболее распространенные способы построения алгоритмов поиска неисправностей.
Способ последовательного функционального анализа. При построении алгоритма способом последовательного функционального анализа предварительно определяются, исходя из назначения объекта, основные функции, характеризующие исправность диагностируемой аппаратуры, например:
· приема и преобразования сигналов заданной частоты;
Как правило, для всех физических параметров объекта известны допустимые пределы их изменения. Следовательно, контроль работоспособности будет состоять из контроля параметров, от которых зависят основные функции. Если какая-либо основная функция не выполняется, то возникает задача поиска неисправности. В этом случае параметр, значения которого вышли за границы допусков, следует считать функцией некоторых других параметров, которые являются физическими параметрами более мелких устройств, или смежных, конструктивных элементов бытовой техники. Продолжая аналогичные рассуждения, составляется схема контроля работоспособности и поиска неисправностей.
Рассмотрим составление алгоритма поиска неисправностей до каскада на примере канала звукового сопровождения телевизора типа УПИМЦТ (см. рис. 3.4).
Рис 3.4 Функциональная модель канала звукового сопровождения телевизора
Основной функцией этого канала является усиление и преобразование сигналов звукового сопровождения. Эта функция выполняется, если при входном сигнале с фиксированными параметрами на выходе будет наблюдаться вполне определенный сигнал. В процессе контроля этого сигнала принимается решение об исправности или неисправности канала.
Последовательно контролируя сигналы на выходе каждого каскада, можно определить неисправный каскад. Получающуюся при этом схему поиска называют деревом функций (рис. 3.5).
Рис. 3.5 Схема поиска неисправностей
Обозначения по схеме
Р0 Канал звука исправен
Р1 Неисправен УЗЧ
Р2 Неисправен РГ
P3 Неисправен фильтр
Р4 Неисправна ИМС
Р5 Неисправна схема РГ
Р6 Неисправна ИМС
Р7 Неисправен контур 6,5 МГц
Р8 Неисправен контур частотного дискриминатора
Способ последовательного функционального анализа для построения алгоритма контроля работоспособности и поиска неисправности прост, нагляден, требует минимум информации от диагностируемой аппаратуры. Однако полученный с использованием этого способа алгоритм поиска неисправностей не оптимален ни по времени, ни по средним затратам.
Способ половинного разбиения.
Способ половинного разбиения используется часто при разработке алгоритмов поиска неисправностей в технической системе с последовательно соединенными элементами.
Диагностируемая аппаратура состоит из N последовательно соединенных функциональных элементов, неработоспособна из-за отказа i-го элемента (i = 1,2. n). Вероятности состояний P(Si) одинаковы для всех функциональных элементов, стоимости контроля выходных параметров Zi также одинаковы. При этих условиях первым следует контролировать параметр, несущий максимум информации о состоянии диагностируемой аппаратуры, неопределенность состояния которой до контроля оценивается величиной энтропии Ho.
Таким образом, целесообразно контролировать такой параметр Zк, который разбивает объект диагностики пополам, т.е. чтобы H(Zk) = Hо/2 при положительном и отрицательном результатах контроля. Каждый последующий параметр для контроля выбирается аналогично, т.е. делят пополам образующуюся систему после выполнения предыдущей проверки в зависимости от результатов ее исхода.
Алгоритм поиска неисправности для функциональной модели (рис.3.7) приведен на рис. 3.8.
Рис.3.7 Функциональная модель (пример)
Рис.3.8 Алгоритм поиска неисправности.
1 – выходной параметр функционального элемента в допуске;
0 — выходной параметр функционального элемента вне допуска.
Способ половинного разбиения применим и для случаев, когда в диагностируемой аппаратуре неисправно несколько элементов.
Способ «время—вероятность». Этот способ находит применение для технической системе, в которой функциональные элементы соединены произвольно и имеют разные вероятности P(Si) состояний и различные стоимости проведения контроля параметров C(Z1,).
Эффективность способа оценивается средним временем поиска неисправного элемента или средним временем контроля одного параметра.
Для определения неисправного элемента выбирают набор параметров, обеспечивающих поиск до заданной глубины. Последовательность контроля параметров устанавливается в порядке уменьшения величин:
Алгоритм, построенный по такому способу, обладает минимальным средним временем поиска любого неисправного элемента.
Способ на основе иерархического принципа.
Построение алгоритмов диагностирования по иерархическому принципу целесообразно использовать для технических систем со встроенными устройствами контроля. При данном способе N первичных функциональных элементов диагностируемого объекта разбиваются на k групп по N1 элементов в каждой группе.
Выходные параметры первичных функциональных элементов объединяются в одной точке с измерительным устройством и индикатором неисправности. Таких индикаторов будет k штук. Последние индикаторы еще разбиваются на r групп по N2 штук. Выходы N2 индикаторов снова объединяются в одной точке с одним индикатором. Таких индикаторов будет r штук и т.д.
В результате придем к одному индикатору неисправности.
В такой системе при выходе из строя функционального элемента объекта диагностики индикатор покажет неисправность диагностируемого объекта. Для обнаружения неисправного функционального элемента просматриваются показания индикаторов первой ступени и при обнаружении индикатора, указывающего на неисправность, просматриваются индикаторы следующей ступени, соединенные только с этим индикатором. Проверки продолжаются в указанной последовательности до тех пор, пока не будет обнаружен неисправный первичный функциональный элемент (рис. 3.9). Поиск неисправного первичного функционального элемента по приведенной схеме позволяет значительно сократить время поиска по сравнению с поиском среди N элементов.
Рис. 3.9 Схема поиска неисправностей по иерархическому принципу
Источник: studopedia.su
Тема 3.4. Основные способы построения алгоритмов поиска неисправностей
При построении алгоритма способом последовательного функционального анализа предварительно определяются, исходя из назначения информационной системы, основные параметры, характеризующие исправность системы. Последовательно контролируя сигналы на выходе каждого элемента системы, можно определить неисправный элемент.
Способ последовательного функционального анализа прост, нагляден. Полученный с использованием этого способа алгоритм поиска неисправностей не оптимален ни во времени, ни по средним затратам.
Способ половинного разбиения используется при разработке алгоритмов поиска неисправностей в информационных системах с последовательно соединенными элементами.
Диагностируемая информационная система, состоящая из N последовательно включенных элементов, неработоспособна из-за отказа i-го элемента (i = 1,2. N). Целесообразно контролировать такой выходной сигнал, который разбивает объект диагностики пополам. Каждый последующий параметр для контроля выбирается аналогично, т. е. делят пополам образующуюся систему после выполнения предыдущей проверки, в зависимости от результатов её исхода.
Тема 4.1. Общие положения
Под контролем ИС понимают процессы, обеспечивающие обнаружение ошибок в их функционировании, вызванных отказами аппаратуры, ошибками в программах или другими причинами.
В сочетании с мерами по резервированию контроль является одним из самых эффективных средств повышения надежности и достоверности обработки информации.
Ошибки, возникающие в процессе функционирования цифровых систем, можно рассматривать как композицию следующих потоков ошибок:
- ошибки проектирования;
- ошибки операторов ЭВМ;
- ошибки исходных данных;
- ошибки в линиях связи при передаче данных;
- ошибки при хранении информации на машинных носителях;
- сбои в работе аппаратуры.
Ошибки проектирования. К ним относят ошибки в документации, аппаратуре или программном обеспечении, которые не были обнаружены в процессе проектирования и опытной эксплуатации системы, но проявились в процессе работы.
В математическом обеспечении ИС можно выделить следующие типы ошибок:
- программные ошибки ― ошибки, порождаемые неправильным использованием команд, операторов, адресации и т. п. Их количество зависит от квалификации программистов и степени автоматизации проектирования программ;
- алгоритмические ошибки возникают из-за неадекватности модели реальному процессу, неправильного выбора численного метода решения задачи.
- системные ошибки являются следствием неправильного взаимодействия алгоритмов друг с другом при функционировании системы в целом.
Ошибки операторов возникают в работе системы из-за неправильных действий обслуживающего персонала, а также вследствие плохой организации технической эксплуатации. Поэтому важно правильно предусмотреть роль человека в системе, учитывая его возможности по физическим, психическим и другим видам нагрузок.
Ошибки исходных данных возникают в ИС, в которых большое количество исходной информации подготавливается вручную. Например, при обработке экономической информации наиболее характерными являются ошибки из-за неправильного заполнения исходной документации и при вводе данных с исходных документов в ЭВМ.
Ошибки в линиях связи. Линии связи, предназначенные для передачи информации, являются в настоящее время неотъемлемой компонентой большого числа ИС. Средняя вероятность ошибки q для большинства линий связи составляет 10 -3 –10 -5 .
Ошибки, порождаемые неисправностями логических и специальных элементов. Для их вычисления необходимо знать вероятности возникновения ошибок (неисправностей) в отдельных элементах. В инженерной практике, как правило, предполагают, что поток неисправностей в работе элементов является пуассоновским с параметром λ, причем значение λ состоит из двух составляющих, т. е. λ = λ0+λсб, где λ0 ― интенсивность отказов элемента, λсб ― интенсивность сбоев.
Значения λ0, λсб определяют на основании испытаний аппаратуры на надежность или с помощью статистических данных, полученных при эксплуатации. При отсутствии статистических данных по интенсивностям возникновения сбоев для приближенных расчетов можно полагать, что λсб на порядок больше, чем интенсивность отказа.
Суммарный поток рассмотренных ошибок определяет возможность соблюдения временного регламента решения задач в ИС и достоверность информации, получаемой при решении. Выдачу системой недостоверных результатов почти во всех случаях следует рассматривать как отказ в ее работе. Поэтому понятие «ошибка» в ряде случаев целесообразно рассматривать как явление искажения информации, подающееся с определенной вероятностью обнаружению и регистрации.
Для обнаружения ошибок в работе информационных систем широко используют различные методы контроля, позволяющие зафиксировать наиболее типичные ошибки. Поэтому необходимо знание причин и характеристик возникающих ошибок для правильного выбора метода контроля. Сбои, зафиксированные системой контроля, устраняют, и тем самым не допускается их распространение на выход системы. При обнаружении систематической ошибки требуется локализовать и устранить причину ошибки.
Средства контроля ИС подразделяются на:
- аппаратные;
- программные;
- смешанные.
Они характеризуются тремя основными параметрами:
- Полнотой (глубиной) контроля.
- Временем обнаружения ошибки.
- Сложностью.
Полнота контроля оценивается как доля отказов, обнаруживаемых в результате контроля, от общего их количества:

, (4.1)
где Mk ― множество элементов, подлежащих контролю; M ― множество всех элементов системы; ni ― число элементов i-го типа; λi ― интенсивность отказов элементов i-го типа.
Время обнаружения ошибки (время контроля) определяется как интервал времени от момента возникновения ошибки до момента ее обнаружения.
Сложность средств контроля характеризуется массой, размерами, стоимостью, потребляемой энергией, памятью и другими параметрами аппаратных средств.
По характеру контроль в ИС подразделяется на:
- оперативный контроль осуществляется в ходе решения задач и позволяет в процессе их решения немедленно обнаруживать ошибку. Однако оперативный контроль в принципе является неполным, поскольку выполняется на случайных, не приспособленных для целей контроля задачах;
- тестовый контроль осуществляется в специально отведенные промежутки времени на основе решения специальных, тестовых задач. Он основан на тестах, обеспечивающих контроль всех элементов системы (аппаратуры, команд программы) за короткое время. Недостаток тестового контроля ― затраты дополнительного процессорного времени.
По способу организации различают контроль прямой, обратный и смешанный.
При прямом контроле основной вычислительный процесс О с исходными данными х и результатами у сопровождается параллельным вычислительным процессом П рис. 4.1.1 (а). В случае безошибочной работы системы результаты процессов О и П должны совпадать, что определяется устройством сравнения БС. Если результаты отличаются, то БС выдает сигнал об ошибке.
Если процессы О и П осуществляются по одной и той же программе, то приведенная схема позволяет выявить только сбои и отказы аппаратуры. В случае, когда информация обрабатывается по различным, но функционально эквивалентным программам, прямой контроль позволяет, кроме того, выявлять и ошибки в программах.
Рисунок 4.1.1. Схемы организаци контроля

Недостаток прямого контроля ― большие затраты аппаратных средств. Они могут быть снижены, если параллельный процесс П будет упрощен за счет снижения точности: можно предположить, что большинство ошибок приведет к сильному отклонению результата О от правильного значения, такому, которое перекроет погрешность результата процесса П и ошибка будет обнаружена по расхождению между результатами процессов О и П.
При обратном контролерис. 4.1.1 (б) параллельный процесс П с исходным данными у и результатами х осуществляет обратное преобразование результата контролируемого процесса О. Сопоставление обратного решения с исходными данными позволяет обнаружить ошибку.
Недостаток обратного контроля, кроме ограниченности класса решаемых задач, заключается и в том, что время, необходимое на получение контролируемого решения, будет не меньше суммарного времени выполнения процессов О и П.
По объекту контроля различают контроль аппаратуры (АЛУ, функциональные преобразователи, память, управление, ввод-вывод), программного обеспечения и работы операторов.
Контрольные вопросы
- Что понимается под контролем ИС?
- Какие типы ошибок можно выделить в математическом обеспечении ИС?
- На какие виды подразделяются средства контроля ИС?
- Дайте определение понятия ошибка.
- Каков недостаток прямого контроля?
- Каков недостаток обратного контроля?
- Каков недостаток тестового контроля?
- Какие виды контроля различают в зависимости от объектов контроля?
- Чем характеризуется сложность средств контроля?
Источник: studfile.net