
Общие сведения о системе Simulink
Программа Simulink является приложением к пакету MATLAB. При моделировании с использованием Simulink реализуется принцип визуального программирования, в соответствии с которым, пользователь на экране из библиотеки стандартных блоков создает модель устройства и осуществляет расчеты. При этом, в отличие от классических способов моделирования, пользователю не нужно досконально изучать язык программирования и численные методы математики, а достаточно общих знаний требующихся при работе на компьютере и, естественно, знаний той предметной области, в которой он работает.
Основным понятием системы моделирования Simulink является сигнал. По умолчанию, сигналы — это скалярные безразмерные переменные, связывающие компоненты модели. Однако, существуют и специальные сигналы, например электрические, гидравлические, механические и т.д., которые определенным образом описывают конкретное физическое влияние одних элементов моделируемой системы на другие. Компоненты модели — это элементы библиотеки Simulink или другие модели, которые осуществляют изменения сигналов (например, интегрирование, усиление, сложение двх сигналов и т.д.).
Simulink 01 Начало работы
Simulink является достаточно самостоятельным инструментом и при работе с ним совсем не требуется знать сам MATLAB и остальные его приложения. С другой стороны доступ к функциям MATLAB и другим его инструментам остается открытым и их можно использовать в Simulink. Часть входящих в состав пакетов имеет инструменты, встраиваемые в Simulink (например, LTI-Viewer приложения Control System Toolbox — пакета для разработки систем управления). Имеются также дополнительные библиотеки блоков для разных областей применения (например, Power System Blockset — моделирование электротехнических устройств, Digital Signal Processing Blockset — набор блоков для разработки цифровых устройств и т.д).
При работе с Simulink пользователь имеет возможность модернизировать библиотечные блоки, создавать свои собственные, а также составлять новые библиотеки блоков.
При моделировании пользователь может выбирать метод решения дифференциальных уравнений, а также способ изменения модельного времени (с фиксированным или переменным шагом). В ходе моделирования имеется возможность следить за процессами, происходящими в системе. Для этого используются специальные устройства наблюдения, входящие в состав библиотеки Simulink. Результаты моделирования могут быть представлены в виде графиков или таблиц.
Преимущество Simulink заключается также в том, что он позволяет пополнять библиотеки блоков с помощью подпрограмм написанных как на языке MATLAB, так и на языках C++, Fortran и Ada.
Для запуска программы необходимо предварительно запустить пакет MATLAB. Основное окно пакета MATLAB показано на рисунке 2.2. Там же показана подсказка, появляющаяся в окне при наведении указателя мыши на ярлык Simulink в панели инструментов.
После открытия основного окна программы MATLAB нужно запустить программу Simulink. Это можно сделать одним из трех способов:

Рисунок 2.2. Основное окно программы MATLAB
- • Нажать кнопку (Simulink) на панели инструментов командного окна MATLAB.
- • В командной строке главного окна MATLAB напечатать Simulink и нажать клавишу Enter на клавиатуре.
- • Выполнить команду Open. в меню File и открыть файл модели (mdl — файл).
Последний вариант удобно использовать для запуска уже готовой и отлаженной модели, когда требуется лишь провести расчеты и не нужно добавлять новые блоки в модель. Использование первого и второго способов приводит к открытию окна библиотеки Simulink (рисунок 2.3).

Рисунок 2.3. Окно библиотеки Simulink. Цифрами обозначены: 1 — строка поиска компонентов, 2 — дерево библиотек Simulink, 3 — содержимое библиотеки (разделы или компоненты библиотеки)
На рисунке 2.3 выделена основная библиотека Simulink (в левой части окна) и показаны ее разделы (в правой части окна). Библиотека Simulink в MATLAB 2010 содержит следующие основные разделы:
- 0. Commonly Used Blocks — часто используемые компоненты из различных разделов основной библиотеки Simulink.
- 1. Continuous — компоненты для моделирования систем в непрерывном времени.
- 2. Discontinuities — компоненты для моделирования негладких и разрывных нелинейных функций.
- 3. Discrete — компоненты для моделирования систем в дискретном времени.
- 4. Logic and Bit Operations — компоненты для моделирования логических (двоичных) операций.
- 5. Lookup Tables — компоненты для моделирования функциональных и табличных зависимостей.
- 6. Math Operations — компоненты для моделирования математических операций.
- 7. Model Verification — компоненты для тестирования и верификации поведения моделей.
- 8. Model-Wide Utilities — вспомогательные компоненты для документирования и линеаризации моделей.
- 9. Ports https://studref.com/396855/tehnika/obschie_svedeniya_sisteme_simulink» target=»_blank»]studref.com[/mask_link]
МАТЛАБ – Симулинк
Simulink – это среда моделирования и проектирования на основе моделей для динамических и встроенных систем, интегрированная с MATLAB. Simulink, также разработанный MathWorks, представляет собой инструмент языка графического программирования потоков данных для моделирования, моделирования и анализа многодоменных динамических систем. В основном это графический инструмент для построения блок-схем с настраиваемым набором библиотек блоков.
Это позволяет включать алгоритмы MATLAB в модели, а также экспортировать результаты моделирования в MATLAB для дальнейшего анализа.
- системный дизайн
- моделирование
- автоматическая генерация кода
- тестирование и проверка встроенных систем
Существует несколько других дополнительных продуктов, предоставляемых MathWorks и сторонними аппаратными и программными продуктами, которые доступны для использования с Simulink.
Следующий список дает краткое описание некоторых из них –
- Stateflow позволяет разрабатывать конечные автоматы и блок-схемы.
- Simulink Coder позволяет генерировать исходный код на C для автоматической реализации систем в реальном времени.
- xPC Target вместе с системами реального времени на базе x86 обеспечивают среду для имитации и тестирования моделей Simulink и Stateflow в реальном времени на физической системе.
- Встроенный кодер поддерживает определенные встроенные цели.
- HDL Coder позволяет автоматически генерировать синтезируемые VHDL и Verilog.
- SimEvents предоставляет библиотеку графических строительных блоков для моделирования систем массового обслуживания.
Stateflow позволяет разрабатывать конечные автоматы и блок-схемы.
Simulink Coder позволяет генерировать исходный код на C для автоматической реализации систем в реальном времени.
xPC Target вместе с системами реального времени на базе x86 обеспечивают среду для имитации и тестирования моделей Simulink и Stateflow в реальном времени на физической системе.
Встроенный кодер поддерживает определенные встроенные цели.
HDL Coder позволяет автоматически генерировать синтезируемые VHDL и Verilog.
SimEvents предоставляет библиотеку графических строительных блоков для моделирования систем массового обслуживания.
Simulink способен систематически проверять и проверять модели посредством проверки стиля моделирования, отслеживания требований и анализа охвата модели.
Simulink Design Verifier позволяет выявлять ошибки проектирования и генерировать сценарии тестирования для проверки модели.
Использование Simulink
Чтобы открыть Simulink, введите рабочее пространство MATLAB –
simulink
Simulink открывается с помощью браузера библиотеки . Браузер библиотеки используется для построения имитационных моделей.
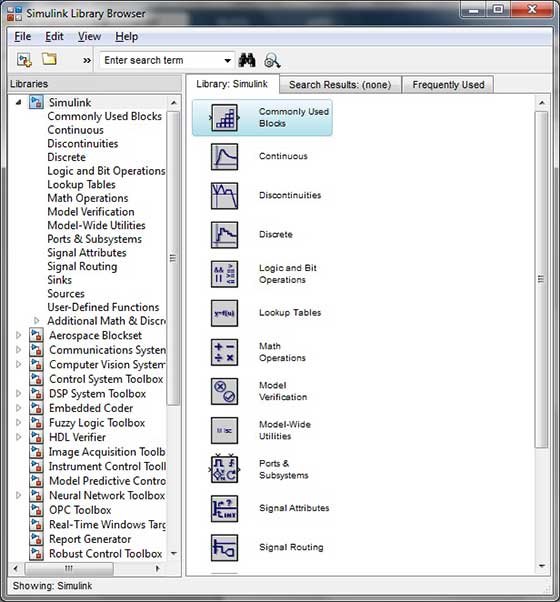
В левой части окна вы найдете несколько библиотек, распределенных по категориям на основе различных систем, щелкнув по каждой из них, вы увидите блоки дизайна на правой панели окна.
Модели зданий
Чтобы создать новую модель, нажмите кнопку « Создать» на панели инструментов браузера библиотеки. Это открывает новое безымянное окно модели.
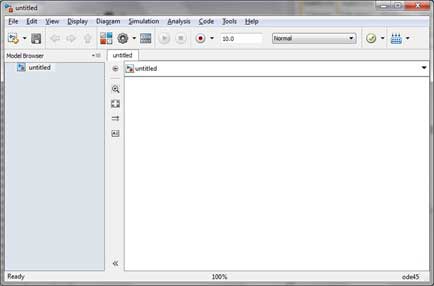
Модель Simulink – это блок-схема.
Элементы модели добавляются путем выбора соответствующих элементов в браузере библиотеки и перетаскивания их в окно модели.
Кроме того, вы можете скопировать элементы модели и вставить их в окно модели.
Примеры
Перетащите элементы из библиотеки Simulink, чтобы создать свой проект.
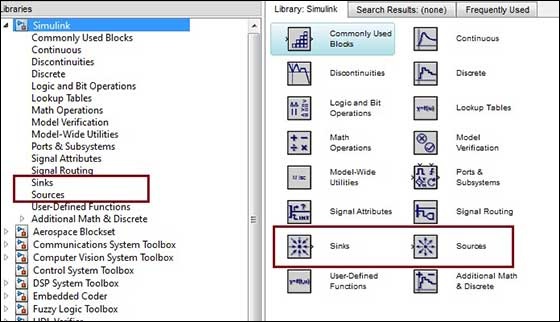
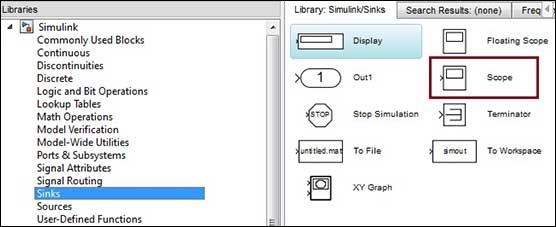
В этом примере для моделирования будут использоваться два блока – Источник (сигнал) и Раковина (область). Генератор сигналов (источник) генерирует аналоговый сигнал, который затем будет графически визуализирован областью действия (приемником).
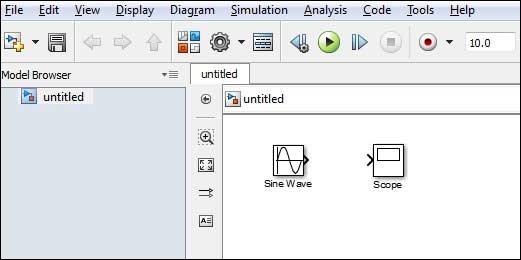
Начните с перетаскивания необходимых блоков из библиотеки в окно проекта. Затем соедините блоки вместе, что можно сделать, перетаскивая соединители из точек соединения одного блока в точки другого.
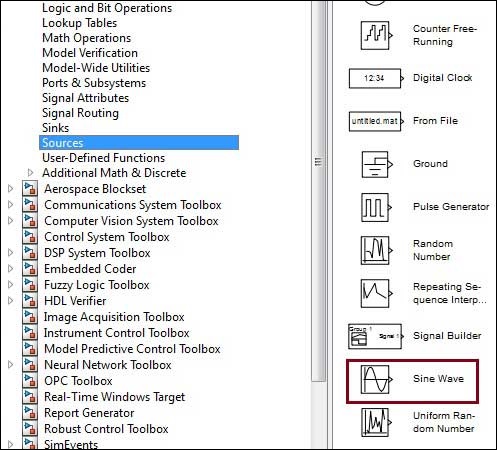
Давайте перетащим блок «Синусоида» в модель.
Выберите «Sinks» из библиотеки и перетащите блок «Scope» в модель.
Перетащите сигнальную линию с выхода блока синусоидальной волны на вход блока Scope.
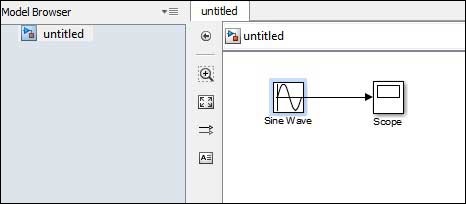
Запустите симуляцию, нажав кнопку « Выполнить », сохраняя все параметры по умолчанию (вы можете изменить их из меню симуляции)
Вы должны получить ниже график из области видимости.
Источник: coderlessons.com
Simulink
Simulink – среда динамического междисциплинарного моделирования сложных технических систем и основной инструмент для модельно-ориентированного проектирования. Его основным интерфейсом является графический инструмент для построения диаграмм и настраиваемый набор библиотек блоков. Он предлагает тесную интеграцию с остальной средой MATLAB и может либо использовать MATLAB, либо создавать сценарии из него. Simulink широко используется в автоматическом управлении и цифровой обработке сигналов для многодоменного моделирования и проектирования на основе моделей.
В сочетании с другими своими продуктами Simulink может автоматически генерировать исходный код на языке C для реализации систем в режиме реального времени. Поскольку эффективность и гибкость кода улучшаются, он становится все более широко распространенным для производственных систем, в дополнение к тому, что является инструментом для разработки встроенных систем из-за его гибкости и способности к быстрой итерации, Встроенный кодер создает код, достаточно эффективный для использования во встроенных системах.
Simulink. Начало работыМодельно-ориентированное проектирование: от концепции к коду
Модельно-Ориентированное Проектирование в Simulink
Модельно-Ориентированное Проектирование в Simulink
Simulink предназначен для моделирования и симуляций на системном уровне, что позволяет проводить всестороннее исследование разрабатываемой системы в единой среде проектирования.
Моделирование и симуляции позволяют провести проверку поведения системы в критических условиях или аварийных сценариях. Тем самым происходит снижение затрат на дорогостоящие физические прототипы. Проверка системы осуществляется с помощью полунатурного моделирования и быстрого прототипирования.
Модели Simulink поддерживают автоматическую генерацию кода промышленного качества на языках С, C++ и HDL. Результаты работы сгенерированного кода и модели идентичны. Следующим шагом является развертывание кода на целевом вычислителе или FPGA/ASIC.
Simulink использует преимущества MATLAB
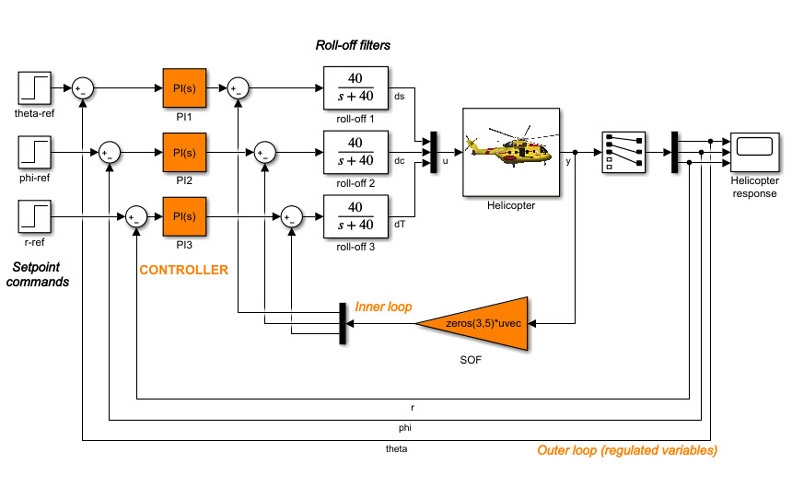
Система управления в Simulink
Алгоритмы, созданные в MATLAB, не требуется переделывать для повторного использования в Simulink. Код MATLAB добавляется в блок Simulink или диаграмму Stateflow без изменений.
Так же MATLAB используется для создания наборов входных данных для симуляций систем. Симуляции масштабируются на кластеры для ускорения таких инженерных задач как перебор параметров или оптимизация, а затем их результаты анализируются и визуализируются в MATLAB.
Система управления в Simulink
Источник: exponenta.ru
SIMULINK, КАК УДОБНОЕ СРЕДСТВО ЦИФРОВОГО МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ И СИСТЕМ
В наши дни компьютерная математика находится на этапе быстрого развития. Она породила специальные программные средства – системы компьютерной математики (СКМ). Среди СКМ выделяется математическая система MATLAB – одна из самых эффективных среди систем для численных вычислений. MATLAB имеет мощные средства диалога, графики и комплексной визуализации вычислений.
Система MATLAB предлагается разработчиками (корпорация The Math Works, Inc.), как лидирующий на рынке язык программирования высокого уровня для технических вычислений, расширяемый большим числом пакетов прикладных программ – расширений (их существует свыше сотни). Самым известным из них стало расширение Simulink,обеспечивающее блочное имитационное моделирование различных систем и устройств с применением современной технологии визуально-ориентированного программирования.
Особенностью расширения Simulink является то, что в нем реализована возможность решения линейных и нелинейных дифференциальных уравнений численными методами. Для нас это важный момент, так как мы уже говорили, что нам надо будет моделировать динамические объекты, которые описываются дифференциальными уравнениями, а получение решения многих дифференциальных уравнений часто оказывается очень громоздким, так что практическая польза от них становится весьма сомнительной или вообще отсутствует.
В Simulink имеется обширный набор решателей дифференциальных уравнений без ограничение на вид. Итак, пакет расширения Simulink предназначен для математического моделирования динамических систем, представленных блок-схемой, которая называется S-моделью. Для построения функциональной блок-схемы Simulink имеет обширную библиотеку блоков и удобный редактор блок-схем. Используя наборы блоков, пользователь с помощью мыши переносит нужные блоки из библиотеки на рабочий стол пакета Simulink и соединяет линиями входы и выходы блоков. Таким образом, создается блок-схема объекта или системы, то есть модель.
S-модель является фактически программой, которую можно просмотреть с помощью редактора файлов системы MATLAB. Файлы модели имеют расширение .mdl. Однако, эти файлы довольно громоздки и могут содержать, даже для довольно простых моделей, тысячи строк программного кода. Поэтому мы в дальнейшем будем работать только на уровне блоков и составленных из них схем. Это является достоинством визуально-ориентированного программирования.
Итак, Simulink автоматизирует наиболее трудоемкий этап моделирования – он составляет и решает системы сложных алгебраических и дифференциальных уравнений, описывающих собранную функциональную схему, обеспечивая удобный и наглядный визуальный контроль за поведением моделируемого объекта.
Основы работы с пакетом Simulink
1. Запуск пакета Simulink

После инсталляции Simulink (отдельно от MATLAB или в его составе) он автоматически интегрируется с MATLAB. Внешне это выражается появлением кнопки New Simulink Model в панели инструментов системы MATLAB. При нажатии этой кнопки открывается окно браузера библиотек «Library: simulink» и окно для создания новой модели Simulink «untitled».
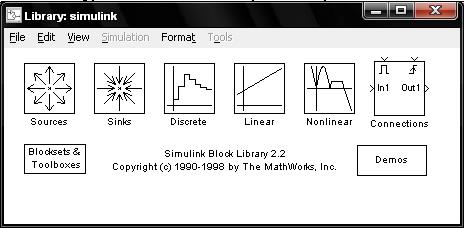
Рис.4.1 – Окно браузера библиотек
Можно также запустить Simulink , выполнив в командной строке MATLAB команду
Работа с Simulink происходит на фоне открытого окна системы MATLAB, в котором нередко можно наблюдать за выполняемыми операциями – если их вывод предусмотрен программой моделирования. Интеграция пакета Simulink с системой MATLAB имеет глубокий смысл. Любые манипуляции с схемой модели выполняются соответствующими командами системы MATLAB.
Решение большинства задач моделирования базируются на решении сложных систем линейных и нелинейных ДУ. Наиболее эффективное решение подобных систем достигается за счет применения аппарата матричных вычислений, реализованных в системе MATLAB. Поэтому сочетание Simulink с системой MATLAB стало столь плодотворным.
2. Особенности интерфейса Simulink
Интерфейс Simulink полностью соответствует стилю интерфейса типичных приложений Windows. Меню окна Simulink содержит следующие позиции:
File –работа с файлами моделей и библиотек (их создание, сохранение, считывание и печать);
Edit –операции редактирования, работа с буфером обмена и создание подсистем;
View –управление отображением панели инструментов и строки состояния;
Simulation –управление процессом моделирования (старт, пауза, вывод окна настройки параметров моделирования);
Format –операции форматирования модели (смена шрифтов, редактирование надписей, повороты блоков, использование тени от блоков, операции с цветами линий блоков, их фоном и общим фоном)
Tools –управление видом анализа (в линейной области и в режиме реального времени).
Источник: studopedia.ru