
Роса разрабатывается Российской компанией ООО «НТЦ ИТ РОСА», внесена в список отечественного программного обеспечения. Имеет как свободный «домашний» дистрибутив, установку которого мы и рассмотрим, так и коммерческие решения. В преддверии массового перехода госорганов на отечественное сертифицированное ФСТЭК-ом ПО, есть смысл начать изучать российские дистрибутивы заранее.
Дистрибутив Rosa Desktop Fresh R11 является некоммерческим решением и находится в свободном доступе. Скачать актуальный дистрибутив с нужной вам графической оболочкой всегда можно на официальном сайте по ссылке. В данный момент на выбор предлагаются 4 оболочки — KDE4, Plasma 5, LXQt, XFCE. Когда мы закончим установку, внизу я прикреплю скриншоты графических оболочек + потребляемую ими оперативную память.
Перед началом установки
Вам потребуется создать носитель (загрузочную флешку), если вы собираетесь ставить ОС на сам комп, или простой образ если устанавливаете на виртуальную машину. С виртуальной машиной всё понятно — скачали ISO по ссылке чуть выше и смонтировали образ перед установкой. С загрузочной флешкой всё чуть сложнее.
Простой способ установки программ в Rosa Linux
Первоначально я записывал ISO образ из под Windows — rufus и его альтернативы при установке дистрибутива сыпали ошибками. Разработчики не зря рекомендуют использовать для записи образа на флешку их личное ПО — ROSA Image Writer. Носитель записанный официальным ПО без проблем справился с установкой.
Нужно упомянуть — ROSA Image Writer превратит ваш носитель как в средство для установки ОС, так и в LiveCD. При этом будут переписаны все её разделы, а размер накопителя якобы сократится. Для дальнейшего использования флешки в качестве накопителя потребуется снова запустить ROSA Image Writer и прожать кнопку «Очистить».
Так же порой на винде проявляется баг — прерывание записи образа на флешку почти сразу после начала копирования. Лечится отключением антивируса и перетыком флешки.
Начало установки
Установка Rosa Linux
Rosa Linux — это российский дистрибутив, основанный на Mandriva и развиваемый компанией НТЦ ИТ РОСА. У дистрибутива есть версия для сервера и для обычного компьютера. Кроме свободной и бесплатной версии дистрибутива есть сертифицированные в ФСТЭК и Министерстве обороны РФ дистрибутивы. Что касается окружения рабочего стола, то официально выпущены сборки для таких окружений, как KDE 4, Plasma 5, LXQT, XFCE.
В этой статье мы рассмотрим, как проходит установка Rosa Linux редакции для дома (Fresh) самой последней версии (R11). Разберём особенности установщика и подготовки системы.
Системные требования Rosa Desktop
Вот основные системные требования для Rosa с оболочкой KDE Plasma:
- Место на жёстком диске: 10 Гб;
- Оперативная память: 1 Гб для 32 бит и 2 Гб для 64 бит;
На официальном сайте разработчики сообщают, что после старта 32-битная система занимает до 250 Мб ОЗУ, а 64-битная 300-400 Мб.
Установка приложений в РОСА ОС
Подготовка к установке Rosa
1. Загрузка образа
Первым делом необходимо скачать образ. Для этого откройте официальный сайт программы, выберите пункт меню Продукты, а потом выберите Rosa Fresh:
Далее нажмите кнопку Скачать Rosa Fresh, а в следующем окне выберите нужную версию:
Как я уже писал, доступны версии с KDE 4, Plasma 5, XFCE, LXQT. Кроме того, поддерживаются как 32-, так и 64-битные версии.
2. Запись образа на флешку
Для записи Rosa на флешку разработчики рекомендуют использовать утилиту RosaImageWriter. Скачать её можно на странице выбора редакции дистрибутива.
Здесь есть версия для Windows, Linux и MacOS. После завершения загрузки нужно распаковать полученный архив и запустить программу RosaImageWriter:
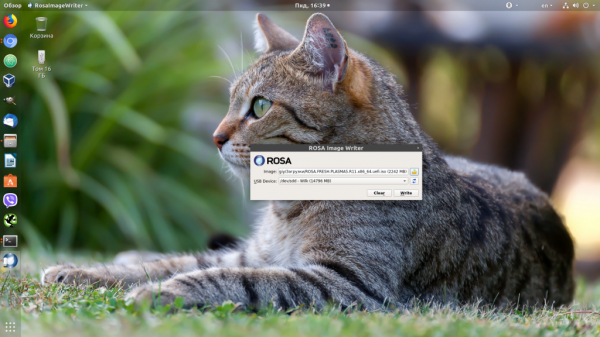
В Linux программу надо запускать от имени суперпользователя. Затем в разделе Image выберите образ Rosa, а в разделе USB Device выберите нужное устройство. Далее нажмите кнопку Write и дождитесь завершения записи:
3. Настройка BIOS
Когда запись образа на флешку будет завершена, можно переходить к установке. В BIOS вашего компьютера нужно установить вашу флешку в качестве первого устройства для загрузки. Чтобы войти в меню BIOS, во время заставки BIOS несколько раз нажмите кнопку Del, F2, Shift+F2 или F8.
Независимо от того, старый у вас BIOS или новый, нужно найти меню Boot и в разделе Boot Device Priority установить на первое место вашу флешку, а затем сохранить настройки и выйти. Флешка должна быть подключена к компьютеру.
Установка Rosa Linux Fresh R11
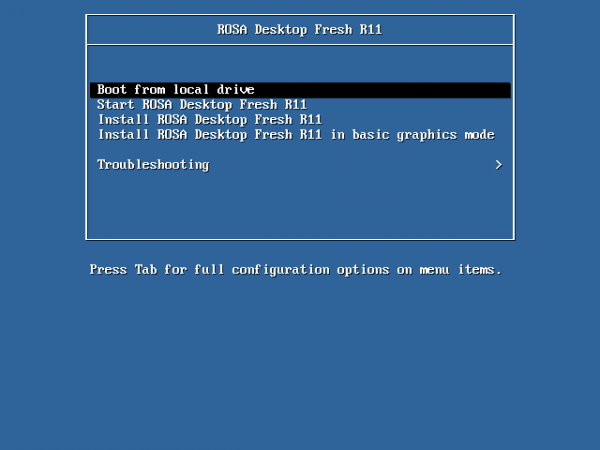
1. Загрузка Live-системы
Уже в основном меню образа вы можете выбрать пункт Install ROSA Desktop Fresh R11 и сразу перейти к установке. Но я не рекомендую так делать. Лучше загрузить систему с LiveCD-образа, а уже потом запускать установку. Так вам проще будет исправлять ошибки, если они возникнут. Поэтому выберите пункт Start ROSA…
Затем дождитесь завершения загрузки системы:

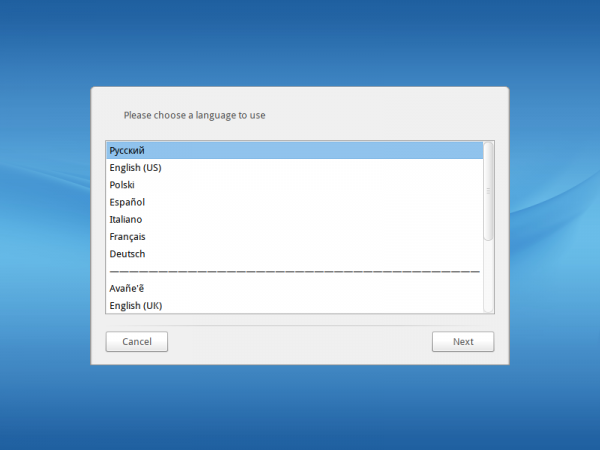
2. Выбор языка
Перед тем, как вы сможете воспользоваться Live-окружением, необходимо его немного настроить. Сначала выберите язык:
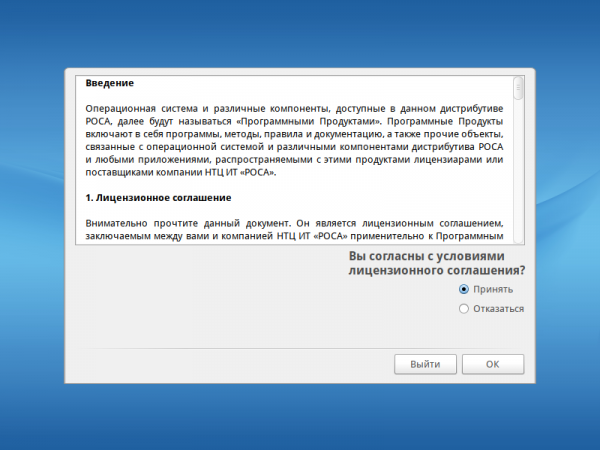
3. Лицензионное соглашение
Прочитайте и примите лицензионное соглашение:
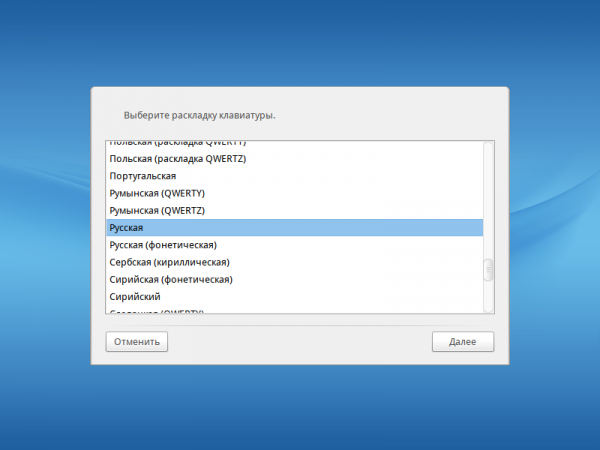
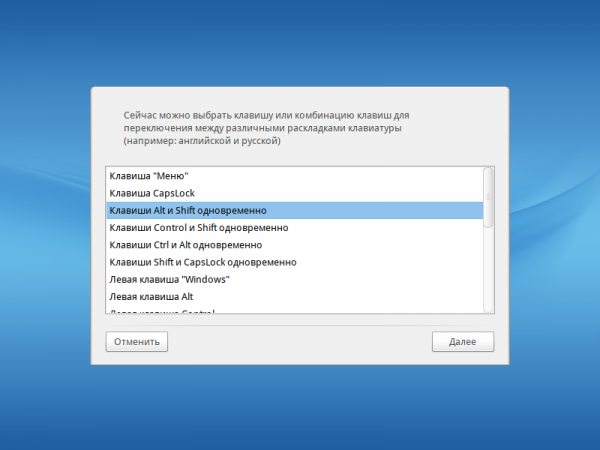
4. Раскладка клавиатуры
Выберите раскладку клавиатуры, а затем клавишу для переключения раскладки:
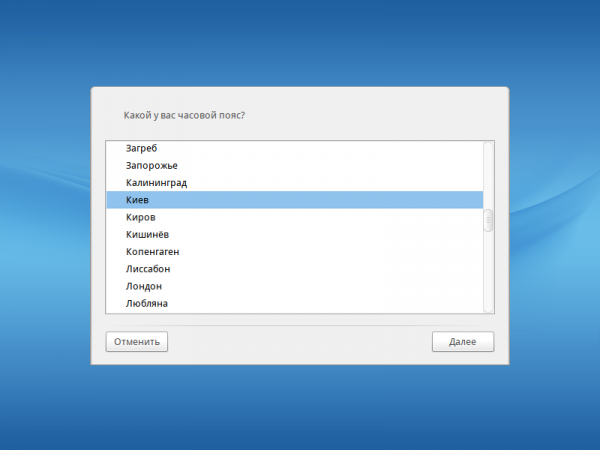
5. Настройка часового пояса и времени
Выберите часовой пояс. Меню выбора не очень удобное, так как нет значений отклонения от GMT:
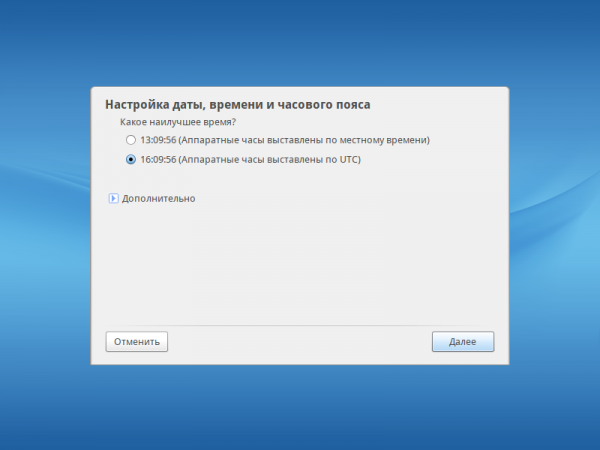
Затем выберите, каким образом нужно сохранять и восстанавливать дату между перезагрузкамип: по местному времени или по UTC:
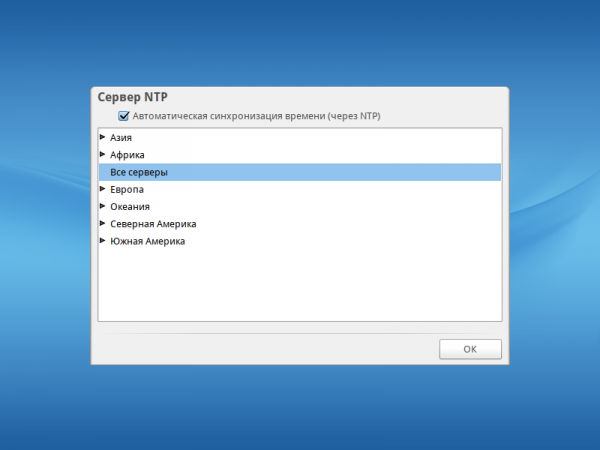
Раскрыв вкладку дополнительно, вы можете включить синхронизацию времени с интернетом с помощью NTP-сервера:
6. Запуск установщика
Только после всех этих настроек вы окажетесь в Live-окружении. Здесь вы можете посмотреть, что из себя представляет система, запускать программы и так далее. Чтобы запустить установку, выполните двойной клик по ярлыку Установщик в режиме Live:

На первом шаге установщика просто нажмите кнопку Далее:

7. Способ разметки диска
Здесь у вас есть два варианта. Либо позволить дистрибутиву разбить диск автоматически и использовать всё свободное пространство, или создать разделы вручную:
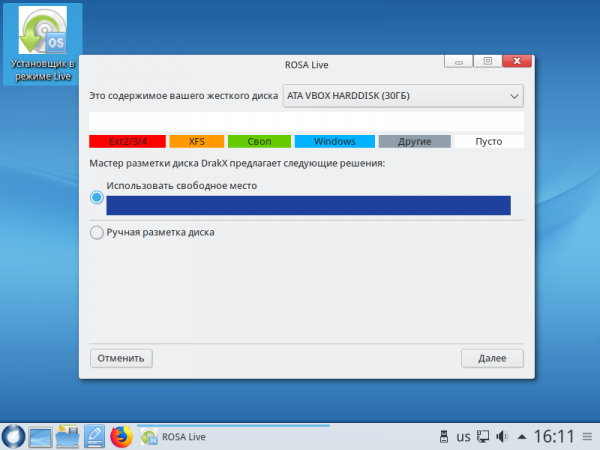
В этой инструкции мы будем разбивать диск вручную. Поэтому выберите Ручная разметка диска.
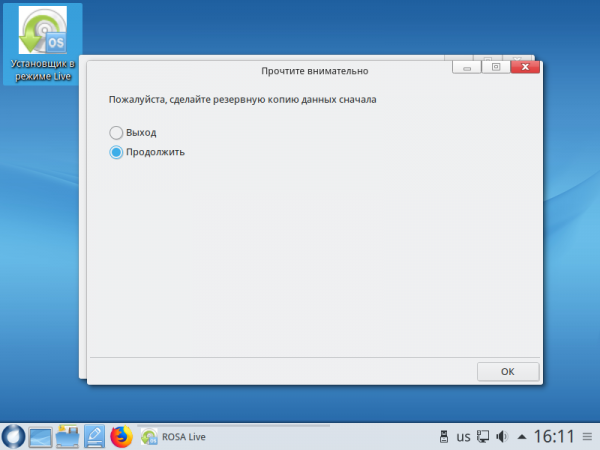
8. Создание корневого раздела
Для установки дистрибутива Linux на компьютер достаточно создать только корневой раздел. Но для удобства использования я рекомендую также создавать домашний раздел. Более подробно про разбивку диска читайте в этой статье. После выбора метода разметки система предложит сделать резервную копию данных. Перед тем, как продолжать, нажмите Ок:
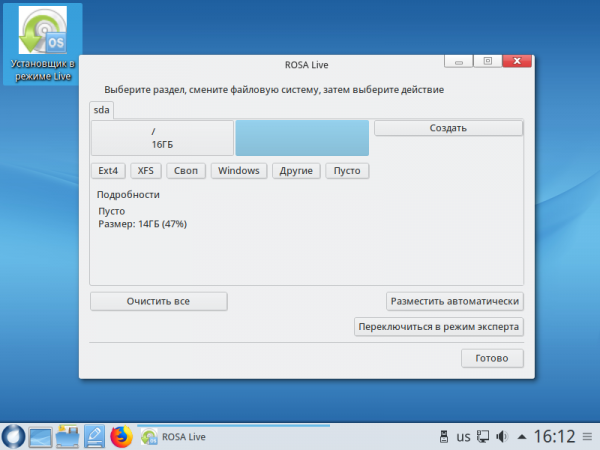
Дальше откроется окно редактора разделов. Щёлкните по свободному месту, чтобы его выделить. У меня никаких систем больше не установлено, поэтому все место свободное:
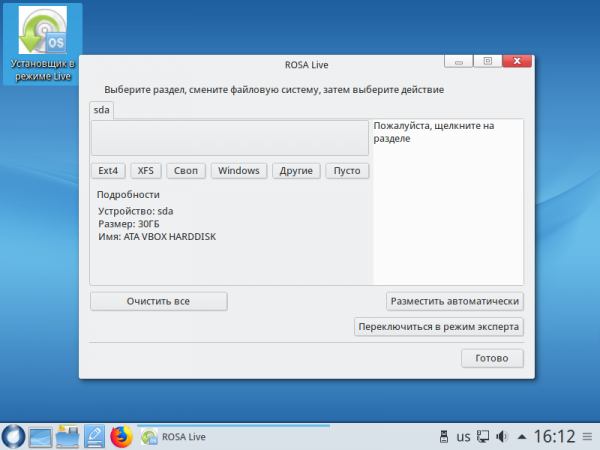
Затем кликните по кнопке Ext4, чтобы создать новый раздел с этой файловой системой.
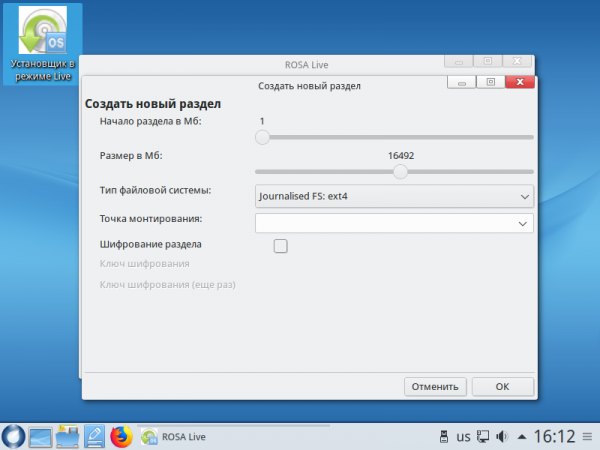
В окне настроек раздела нужно выбрать его размер. Для корневого раздела я рекомендую брать не менее 20 гигабайт, так как здесь будут хранится все системные файлы, журналы и файлы приложений. Начало раздела оставляем там, где оно есть, а в параметре Размер в мб устанавливаем нужный размер корневого раздела. В качестве точки монтирования нужно выбрать /. Затем нажмите Ок.
9. Создание домашнего раздела
У вас появился корневой раздел. Теперь создадим домашний. Для этого кликните по свободному месту, чтобы оно стало выделенным:
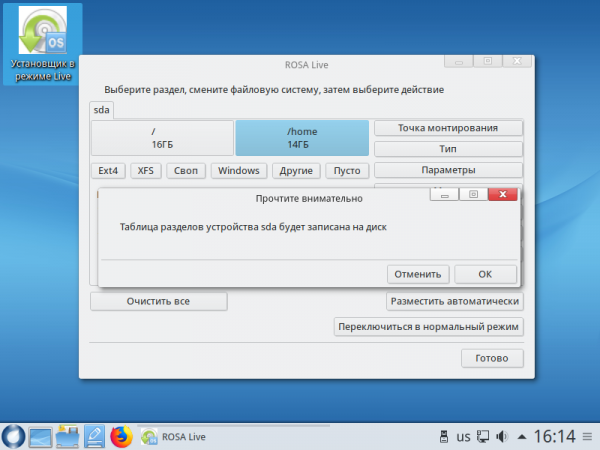
И снова нажмите Ext4. Домашний раздел создаётся аналогичным образом, только в качестве точки монтирования нужно выбрать /home, а его размер уже выбирайтет такой, как вам нужно, — там будут ваши файлы, видео, фильмы, музыка и всё, с чем вы будете работать. Можно выделить всё доступное пространство.
10. Подтверждение разметки
После того, как разбивка будет завершена, нажмите кнопку Готово, а затем согласитесь с тем, что таблица разделов будет записана на диск:
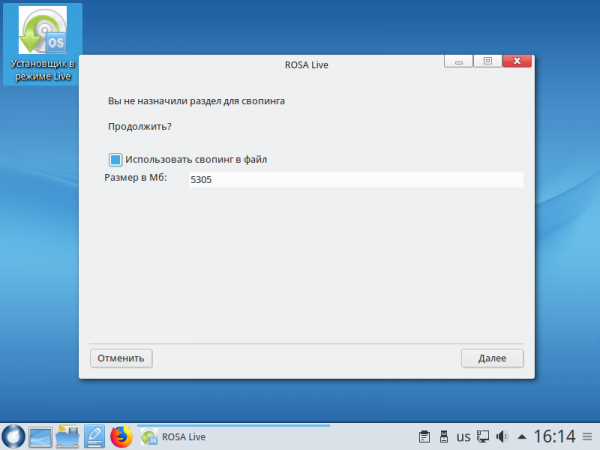
11. Создание файла подкачки
Если вы не создали раздел подкачки во время разбивки диска, то утилита предложит вам создать файл подкачки. Его размер должен быть не меньше размера оперативной памяти, если вы хотите использовать режим сна или гибернацию.
12. Установка системы
Дождитесь, пока закончится распаковка файлов и установка:
13. Установка загрузчика
Выберите диск, на который нужно установить загрузчик и интервал до начала загрузки с пунктом по умолчанию:
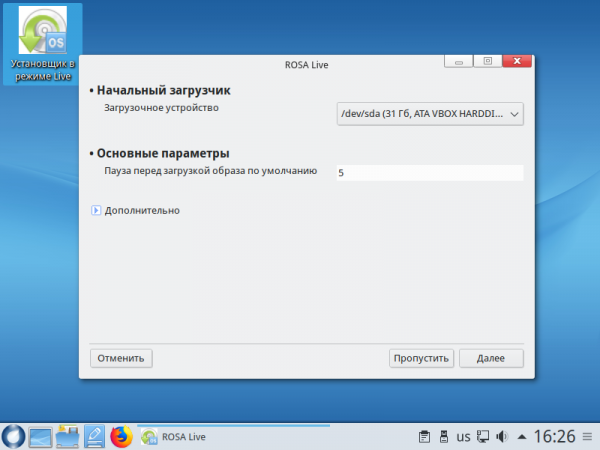
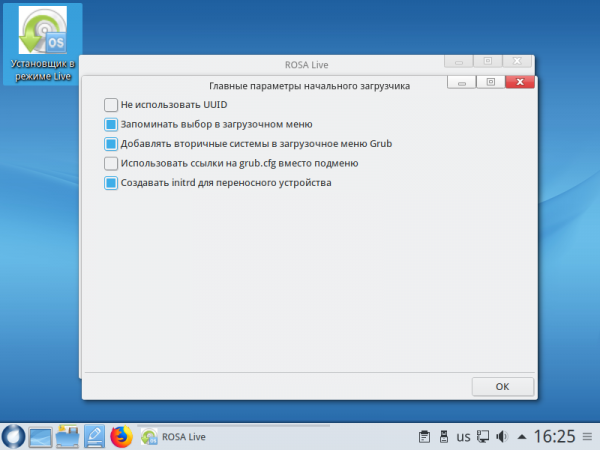
Нажав кнопку Дополнительно, вы можете настроить дополнительные параметры загрузчика:
14. Настройка суперпользователя
Введите пароль для пользователя root:
15. Создание пользователя
Введите имя, логин и пароль для пользователя, от имени которого вы будете пользоваться системой:
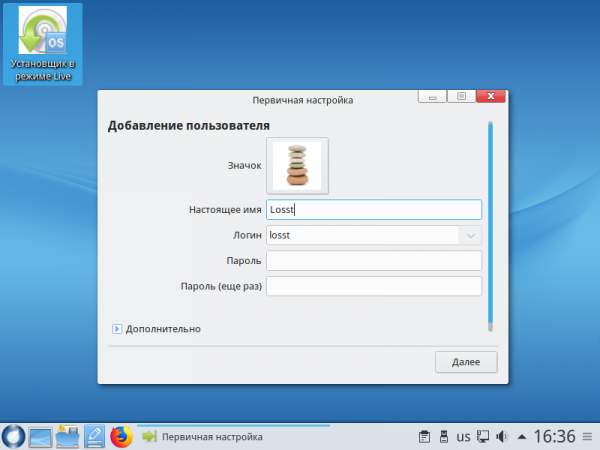
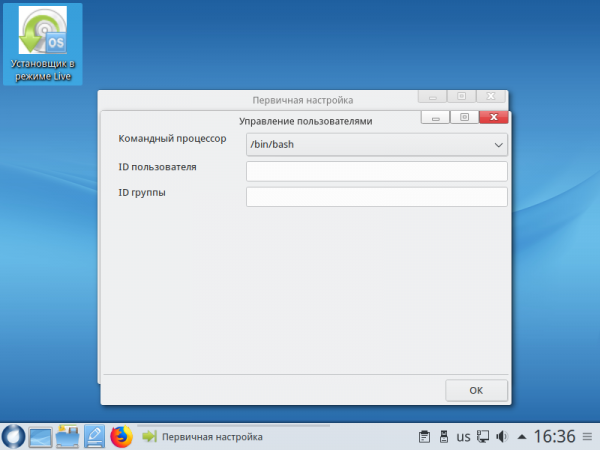
Нажав кнопку Дополнительно, вы можете выбрать интерпретатор команд и указать ID пользователя и группы вручную:
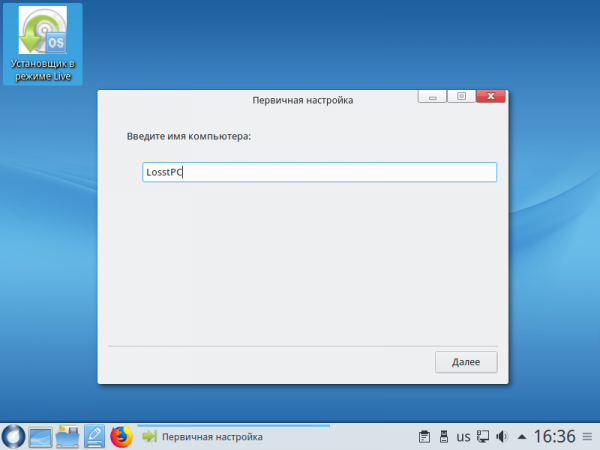
16. Имя компьютера
Введите имя компьютера, оно будет отображаться в терминале, а также для других устройств в локальной сети:
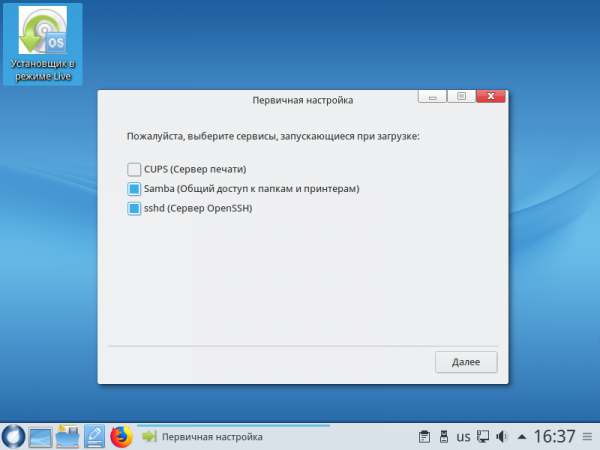
17. Автозагрузка
На последнем пункте мастера установки нужно выбрать службы, которые будут запускаться по умолчанию при старте системы:
18. Завершение установки
Закройте мастер установки и перезагрузите компьютер:
19. Авторизация
Введите логин и пароль пользователя, которого вы создавали во время установки:
20. Готово
Вот так выглядит рабочий стол только что установленной Росы с графическим окружением Plasma 5:
Источник: winzen.ru
Блог Александра Толстого

В этой заметке я хочу сделать небольшой обзор дистрибутива ROSA Desktop Fresh, указав на его особенности и преимущества. Чтобы не повторять уже ранее опубликованные материалы, начну с мини-подборки полезных ссылок:
- Официальный пресс-релиз дистрибутива: http://www.rosalab.ru/products/desktop_fresh
- Промо-ролик по случаю выходы новой версии: http://www.youtube.com/watch?v=leT6N7TAGPs
- Официальная Wiki системы: http://wiki.rosalinux.com/ru/index.php/ROSA_Desktop_2012
- Обзоры системы: раз, два
- Видео-обзор системы: http://www.youtube.com/watch?v=jKldJQZgzT4
- Подборка статей о ROSA на FOSS-blog: http://foss-blog.ru/?cat=50
Почитав и посмотрев материалы по этим ссылкам, вы сможете понять, что из себя представляет система и откуда она взялась. Я сделаю краткий дайджест:
После того, как в сентябре 2010 года из французской компании Mandriva S.A. были уволены все разработчики, сложилась странная ситуация: юрлицо в Париже по-прежнему живёт, но разрабатывать оно ничего уже не может. В это время фактический контроль над дистрибутивом получила российская компания Роса (Rosa Lab), которая привела свою команду разработчиков.
Релиз Mandriva 2011 (Hydrogen) стал последней версией системы с прежним названием, этот выпуск делала уже новая команда из Росы. Собственно говоря, если вы сравните Rosa Desktop Fresh и Mandriva 2011, то заметите их поразительное сходство :).
Работая параллельно над новой сущностью под именем «Rosa Desktop», команда выпустила несколько технических релизов (один из них попал и под мою критику), а также две официальные новые версии: Rosa Marathon (май 2012) и Rosa Desktop Fresh (декабрь 2012). Первая — это LTS-версия с 5-летним сроком поддержки, вторая — версия для рабочего стола, компьютерных энтузиастов и широкой публики в целом. Технически системы отличаются не только версиями пакетов, но и тем приятным фактом, что для Desktop Fresh, о которой и идёт речь сейчас, подготовлен наполненный прикладном ПО репозиторий Contrib. Это означает, что подавляющее число программ, которые вам захочется доустановить, скорее всего уже будут в стандартном репозитории. В Росалабе также гордятся своей собственной системой сборки пакетов ABF, которая позволила привести репозитории в порядок, избавиться от «мусорных» пакетов и здорово повысить стабильность и управляемость разработкой.
Параллельно этому, «старые» разработчики из Mandriva основали форк — комьюнити-дистрибутив Mageia. По разным причинам, эта система завоевала огромную популярность в среде идейных поклонников Open Source. Кроме того, вплоть до недавнего времени, Mageia превосходила Росу в плане качества релизов.
Достигалось это следующим образом: в то время как Роса производила глобальные перемены, внедряла свои разработки и при этом вела несколько других проектов (включая порт системы на ARM), создатели Mageia просто взяли за отправную точку старую Mandriva 2010 и стали обновлять её пакеты до актуальных версий. Получилось, что особо ничего нового в обеих вышедших версиях Mageia нет, но зато там нет и многих «детских» ошибок Росы, за которые последняя не раз подвергалась насмешкам. И, тем не менее, Росе есть чем похвастаться. Процитирую юзера Pulfer:
Вообще, концептуальное пересечение с Магеей большое (в силу общих корней). Но есть огромное кол-во нюансов, особенно в том, что касается приоритетов дальнейшего развития. В частности:
— В Росе/Мандриве проделывается большая работа по приведению спеков в порядок (в соответствие с действующими policy, новым функционалом RPM и т.д.).
В Магее, к сожалению, спеки в целом скорее деградируют, порой в репы собираются пакеты прямо из Федоры, несмотря на радикально разные policy сборки библиотек и т.д. С точки зрения простого пользователя это может сейчас не важно, но поддерживать такую пакетную базу со временем будет всё труднее и труднее.
— В Росе/Мандриве установлен жёсткий контроль за пересобираемостью и замкнутостью релизных репозиториев (начиная с 2012.1, в Марафоне этого ещё не было, не говоря уже о старых релизах Мандривы, где в репах было полно пакетов, которые последний раз собирались за несколько лет до релиза, а потом перестали собраться новым gcc, с новыми либами и т.д.).
— В Росе/Мандриве очень активно развивается сам RPM, всё больше вещей автоматизируется.
В Магее обычно удачные решения тоже реализуются, но порой с существенным отставанием. В частности, можно вспомнить, как долго в Магее приходилось пользоваться костылями в связке с find_lang для omf-файлов, тогда как в Росе/Мандриве не надо было дополнять find_lang костылями.
— В Росе/Мандриве идёт очистка базовой части системы от перлового кода (хотя скорее начата, т.к. сделать надо ещё ОЧЕНЬ много, т.к. многие вещи надо писать с нуля, а не просто выкидывать). Активно идёт работа по внедрению uClibc, работа над ARM-портом.И таких нюансов дофига, можно до бесконечности перечислять. А нюансы сегодня — это радикальные отличия завтра…
Источник
Что касается реакции русского Linux-сообщества на инициативы Rosa Lab, то она больше всего напоминала хулиганские насмешки и издевательства. В основе критики были:
- Неясности с тем, как соотносится Национальная Программная Платформа (НПП) и Rosa Linux. Компанию обвиняли в распиле бюджетных денег.
- Объективные ошибки и глюки системы, плохая поддержка оборудования (особенно видеочипов Radeon).
- Неочевидность отличительных свойств дистрибутива. Критики видели в ней «велосипед», БолгенОС, просто «ещё один ненужный Linux».
Про НПП я писать не хочу, так как не интересуюсь этой темой (вроде как никто ничего не крал, а просто освоили финансирование фонда NGI), а про глюки скажу лишь так: в рассматриваемой версии Rosa Desktop Fresh их стало заметно меньше, и система скорее всего нормально установится на большинстве машин.
Гораздо лучше и интереснее будет поговорить о фирменных разработках Rosa Lab, которые реализованы в дистрибутиве, о тех отличиях, которые выделяют её на фоне конкурентов. Ниже я постараюсь показать и рассказать о тех функциях, которые специфичны для Rosa и более нигде (или почти нигде) не встречаются. Таких наработок много, и часть из них видна пользователю практически с первых минут работы. Итак, поехали.
Новый интерфейс
Раз уж перед нами «десктопный» Linux, то и встречать его надо по одёжке. В Rosa Desktop единственным официально поддерживаемым рабочим окружением является KDE 4. Текущая версия комплектуется KDE 4.9, для которого дополнительно сделана фирменная тема оформления.
На счёт этого есть смысл сделать отступление: дело в том, что несмотря на кажущееся многообразие тем, стилей и иконок на kde-look.org, по-настоящему качественных наборов для KDE не так уж много. Кроме стандартной темы иконок Oxygen, можно вспомнить разве что KFaenza и Buuf. Есть и другие варианты, но они все недостаточно заточены именно под KDE, где используется множество дополнительных иконок.
В Rosa Desktop есть фирменный набор иконок Rosa Elementary, над которым много работал минимум один профессиональный дизайнер. Изначально основанная на значках Elementary от Dan Rabbit, сейчас тема в Rosa Desktop уже достаточно далеко ушла по своему пути. Нарисовано не менее 30 комплектов своих иконок (внутри комплекта для каждого размера вариант иконки рисуется отдельно).
В качестве декораций окон используется собственная тема, визуально напоминающая стиль Windows Vista/7, но при этом с реалистичными тенями под окнами, что явно позаимствовано из Apple OS X. Тени очень удачны, они создают эффект «парения» окон над рабочим столом.
Элементы управления для программ на Qt и GTK выглядят одинаково — этого достигли путём использования GTK2-темы для всей системы (KDE умеет работать с темами GTK2, хотя и не без проблем). Тема тоже основана на Elementary, но в неё внесли множество усовершенствований и слегка изменили вид некоторых элементов (полосы прокрутки очень напоминают «маковские», например).
Нижняя панель здесь называется RocketBar, хотя по сути это просто слегка изменённый набор плазмоидов, аналогичный стандартной панели KDE 4. В Rosa Lab сделали с нуля несколько новых плазмоидов, часть из которых была впоследствии включена в состав основной ветки KDE. Например, системный лоток здесь полностью реализован на QML (остальные увидят это только в KDE 4.10), есть фирменный плазмоид «стековых папок» — очень удобная штука.
Отдельная гордость разработчиков — это принципиально новое меню SimpleWelcome. Меню занимает весь экран и содержит три раздела с гридами иконок:
- Приветствие — стартовый экран с недавними приложениями и документами
- Приложения — список установленный приложений
- TimeFrame — визуализация данных, полученных из системы индексирования Nepomuk, а также интеграция с Facebook и ВКонтакте.
Перемещаться между разделами можно слайдером в нижней части меню. Сама подача информации явно позаимствована с мобильных интерфейсов и будет понятна пользователям iOS и Android.

Меню SimpleWelcome, вкладка «Приветствие»
(Щёлкните для просмотра в полный размер)

Меню SimpleWelcome, вкладка “Приложения” (Щёлкните для просмотра в полный размер)

Меню SimpleWelcome, вкладка “TimeFrame” (Щёлкните для просмотра в полный размер)

Стековая папка (Щёлкните для просмотра в полный размер)
Плеер ROMP
Изначально в Rosa Lab хотели договориться с разработчиками SMplayer и вместе радикально упростить интерфейс плеера. Но договориться не удалось, поэтому перед нами ещё один фронтэнд к Mplayer: ROMP (Rosa Media Player).
Он отличается очень лаконичным интерфейсом и отсутствием богатого набора настроек. Но есть и интересные функции:
- Запись экранных презентаций в формате WebM
- Обрезка видеофайлов (позволяет удалять паузы, например)
- Извлечение аудиодорожки из видео
По сути, в ROMP сделали интерфейс к ранее известным функциям mplayer, которыми раньше приходилось пользоваться из терминала. Для просмотра кино плеер вполне годится.

Rosa Media PLayer (Щёлкните для просмотра в полный размер)
Собственное облако 2safe
По всей видимости, Rosa Lab желает конкурировать с Ubuntu, у которого есть фирменный облачный сервис Ubuntu One. В Rosa Desktop внедрили аналогичную штуку — Rosa 2safe. Работает она очень похожим образом: вы регистрируетесь на сайте облака, получаете там логин, пароль и 5 Гб бесплатного места в облаке.
Учётные данные вбиваете в менеджер облака (облачко в системном лотке), после чего указываем папку для синхронизации. Файлы в этой папке будут доступны вам как по Webdav, так через сайте 2safe. Если вы авторизуетесь под своими учётными данными на другом ПК, то менеджер 2safe скачает из облака ваши данные на этот ПК, а также поинтересуется, не желаете ли вы расшарить что-то ещё. На Вики-портале Rosa Lab есть хорошее руководство по использованию сервиса.

Файловый менеджер показывает синхронизированные файлы (Щёлкните для просмотра в полный размер)
Собственный софт-телефон YouMagic
Это весьма любопытная и малоизвестная функция, специфичная для свежей версии Rosa Desktop. Суть в следующем: российская компания МТТ выпустила свой программный телефон (софтфон) YouMagic для общения по IP-телефонии, аналог Скайпа. Этот YouMagic умеет звонить на любые телефонные номера по щадящим тарифам, а также позволяет бесплатно обмениваться звонками между устройствам с установленным софтфоном (клиентом). На официальном сайте есть версии клиента под Mac, Windows, Android и iOS, но ничего не сказано про Linux. Однако, видимо МТТ как-то договорилась с Росой, поэтому в этой ОС эксклюзивно имеется полноценная версия YouMagic.
Логином для использования софтфона является уникальный телефонный номер, который выдаётся всем пользователям. Как следует я пока программу не тестировал, но она определённо работает.

YouMagic запущен (Щёлкните для просмотра в полный размер)
Изменения в Dolphin и KDE
Стандартный файловый менеджер KDE4 в Rosa Desktop Fresh выглядит и ведёт себя слегка иначе. У него изменены настройки по умолчанию, теперь программа выглядит проще, содержит меньше кнопок и кажется визуально «чище». Но есть и ещё различия: как я уже писал выше, Dolphin здесь сильно интегрирован с облачным сервисом 2safe, он показывает на файлах и папках статус синхронизации, содержит специальные пункт в контекстном меню, позволяющий добавить файл к списку синхронизируемых, или посмотреть подробности его синхронизации.
Также в Dolphin исправлена неприятная особенность из стандартного KDE. Речь идёт о показе миниатюр файлов и папок (thumbnails), которые в KDE надо включать для каждой папки отдельно. В Rosa Desktop этого делать не надо: если миниатюры глобально включены, то они будут подгружаться везде автоматически. Это очень здорово и удобно, хотя имеет потенциальный недостаток: я как-то открыл в Dolphin свой телефон, подключённый по USB, и при просмотре папки с фотографиями этот kio_thumbnail долго меня не мог отпустить!
Что касается самого KDE, то по слухам в нём довольно много патчей и изменений. С точки зрения пользователя, я нашёл вот такое полезное улучшение:

ШГ не пройдут! (Щёлкните для просмотра в полный размер)
Да, тут можно включать/отключать использование байт-кода прямо в интерфейсе настроек сглаживания шрифтов!
Единый центр управления
Отличительная особенность именно последней версии системы — отсутствие старого «Центра управления Mandriva». Сама оболочка Центра отсутствует, но входившие в неё drak-компоненты, остались, просто теперь они вызываются из стандартного центра управления KDE, где для них сделаны kcm-заглушки.
Этот ход разработчиков вполне логичен, так как прежде у пользователей всегда возникал вопрос: «Зачем в системе два центра управления?«. Теперь тут порядок:

То, чего давно хотелось: одна система — одна «панель управления» (Щёлкните для просмотра в полный размер)
Интересные и оригинальные мелочи
В Rosa Desktop есть несколько милых и приятных штук, например:
-
Пакет console-gentoo-style . После его установки консоль приобретает цвет и поведение «как в Генте». Разумеется, тоже самое можно сделать вручную и на любом другом дистрибутиве. Но тут это сделано просто и изящно:

Удобные цвета из Gentoo (Щёлкните для просмотра в полный размер)
Вместо заключения
Наверное, нужно сразу ответить на вопрос: ставить эту систему или нет? Как минимум, стоит поставить её «на попробовать».
Rosa Desktop Fresh комфортно себя чувствует не на всех конфигурациях, она будет особенно придирчива к видеочипам Radeon (впрочем, использование nomodeset почти всегда спасает), но на типовом железе должна завестись. Система интересна как локомотив в области доводки KDE4 до ума. Многие разработки Rosa Lab принимаются в апстрим KDE, что очень хорошо.
Поэтому, если вам по душе рабочий стол Plasma, то посмотреть на Росу явно стоит. Будьте готовы к тому, что на свете есть и более быстрые KDE4 (например, в Fedora), да и в целом, в той же Ubuntu проблем с оборудованием слегка поменьше, чем в Росе. Но важны и общие тенденции: та же Canonical замыкает разработку Linux на себя, готовит свой дисплейный сервер, навязывает всем плохо настраиваемый Unity и следит за вами через shopping lense.В Росе всего этого нет, поэтому российская разработка сейчас выглядит весьма привлекательно.
P.S. Скриншоты отдельно доступны здесь.
Источник: atolstoy.wordpress.com