
4.5. Если при осмотре будет найдено нарушение в конструкции робота, то судья дает 3 минуты на устранение нарушения. Однако, если нарушение не будет устранено в течение этого времени, команда не сможет участвовать в состязании.
4.8. После запуска роботов операторы должны отойти от поля более чем на 1 метр в течении 5 секунд.
4.11. Если во время матча, конструкция какого либо робота была ненамеренно повреждёна, и требует больше 50 секунд на починку, то матч может прерваться и команде разрешается исправить конструкцию робота, в это время могут проходить матчи с другими командами, после починки робота и завершения текущего матча, прерванный матч продолжается.*
4.12. Матч выигрывает робот, выигравший наибольшее количество раундов. Судья может использовать дополнительный раунд для разъяснения спорных ситуаций.
Grishko Konstantin Evgenevich
Содержимое разработки

Битвы Sumo. Lego Mindstorms ev3. Конструкция робота и программа.
Подготовил презентацию: Гришко К.Е Учитель информатики и ИКТ
Подготовка к соревнованиям с EV3 «Сумо» +
РЕГЛАМЕНТ СОРЕВНОВАНИЙ РОБОТОВ «Сумо»
Подготовил презентацию: Гришко К.Е Учитель информатики и ИКТ

РЕГЛАМЕНТ СОРЕВНОВАНИЙ РОБОТОВ категории «СУМО»
В этом состязании участникам необходимо подготовить автономного робота, способного наиболее эффективно выталкивать робота-противника за пределы черной линии ринга.
РЕГЛАМЕНТ СОРЕВНОВАНИЙ РОБОТОВ категории » СУМО » от 20.04.2012
Условия состязания
1.1. Состязание проходит между двумя роботами. Цель состязания — вытолкнуть робота-противника за черную линию ринга.
1.2. Если любая часть робота касается поля за пределами черной линии, роботу засчитывается проигрыш в раунде (если используется поле в виде подиума, то проигрыш засчитывается, если любая часть робота касается поверхности вне подиума).
1.3. Если по окончании раунда ни один робот не будет вытолкнут за пределы круга, то выигравшим раунд считается робот, находящийся ближе всего к центру круга.
1.4. Если победитель не может быть определен способами, описанными выше, решение о победе или переигровке принимает судья состязания.
1.5. Во время раунда участники команд не должны касаться роботов.
Инстукция по сборке Сумо EV3/Mega-Bot. Instruction robot lego Sumo.
РЕГЛАМЕНТ СОРЕВНОВАНИЙ РОБОТОВ категории » СУМО «
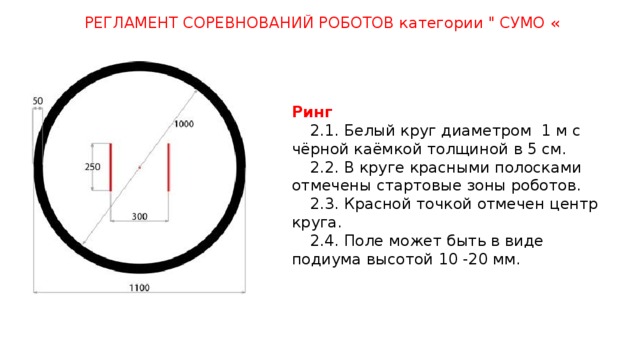
2.1. Белый круг диаметром 1 м с чёрной каёмкой толщиной в 5 см.
2.2. В круге красными полосками отмечены стартовые зоны роботов.
2.3. Красной точкой отмечен центр круга.
2.4. Поле может быть в виде подиума высотой 10 -20 мм.
РЕГЛАМЕНТ СОРЕВНОВАНИЙ РОБОТОВ категории » СУМО «
3.1. На роботов не накладывается ограничений на использование каких либо комплектующих, кроме тех, которые запрещены существующими правилами.
3.2.1. Во всё время состязаний:
Размер робота не должен превышать 250х250х250 мм. Вес робота не должен превышать 1 кг.
3.3. Робот должен быть автономным.
3.4. Робот, по мнению судей, намеренно повреждающий или пачкающий других роботов, или как либо повреждающий или загрязняющий покрытие поля, будет дисквалифицирован на всё время состязаний.
3.5. Перед матчем роботы проверяются на габариты, вес, и расстояние деталей до поля.

РЕГЛАМЕНТ СОРЕВНОВАНИЙ РОБОТОВ категории » СУМО «
РЕГЛАМЕНТ СОРЕВНОВАНИЙ РОБОТОВ категории » СУМО »
3.6. Конструктивные запреты:
Запрещено использование каких-либо клейких приспособлений на колесах и корпусе робота.
Запрещено использование каких-либо смазок на открытых поверхностях робота.
Запрещено использование каких-либо приспособлений, дающих роботу повышенную устойчивость, например, создающих вакуумную среду.
Запрещено создание помех для ИК и других датчиков робота-соперника, а также помех для электронного оборудования.
Запрещено использовать приспособления, бросающие что-либо в робота-соперника.
Запрещено использовать жидкие, порошковые и газовые вещества в качестве оружия против робота-соперника.
Запрещено использовать легковоспламеняющиеся вещества.
Запрещено использовать конструкции, которые могут причинить физический ущерб рингу или роботу-сопернику.
РЕГЛАМЕНТ СОРЕВНОВАНИЙ РОБОТОВ категории «СУМО «
4.1. Соревнования состоят из серии матчей. Матч определяет из двух участвующих в нём роботов наиболее сильного. Матч состоит из 3 раундов по 30 секунд. Раунды проводятся подряд.*
4.5. Если при осмотре будет найдено нарушение в конструкции робота, то судья дает 3 минуты на устранение нарушения. Однако, если нарушение не будет устранено в течение этого времени, команда не сможет участвовать в состязании.
4.8. После запуска роботов операторы должны отойти от поля более чем на 1 метр в течении 5 секунд.
4.11. Если во время матча, конструкция какого либо робота была ненамеренно повреждёна, и требует больше 50 секунд на починку, то матч может прерваться и команде разрешается исправить конструкцию робота, в это время могут проходить матчи с другими командами, после починки робота и завершения текущего матча, прерванный матч продолжается.*
4.12. Матч выигрывает робот, выигравший наибольшее количество раундов. Судья может использовать дополнительный раунд для разъяснения спорных ситуаций.

РЕГЛАМЕНТ СОРЕВНОВАНИЙ РОБОТОВ категории СУМО
Варианты проведения соревнований
5.2.1. После объявления судьи о начале раунда, роботы выставляются операторами перед красными линиями.
5.2.2. Когда роботы установлены на стартовые позиции, судья спрашивает о готовности операторов, если оба операторы готовы запустить робота, то судья дёт сигнал на запуск роботов.
5.2.2. После сигнала на запуск роботов операторы запускают программу.
5.2.3. Роботы должны проехать по прямой и столкнуться друг с другом.
5.2.4. Роботам запрещено намерено маневрировать по рингу.

На основе базового набора EV3 собрать робота « СУМО»
датчик касания
датчик цвета
ультразвуковой датчик
базового набора EV3

2. ОПРЕДЕЛЕНИЕ ПОЛЯ РОБОТА
Задание №2 . Подготовить поле для тестирования робота

Спасибо за внимание!
Подготовил презентацию: Гришко К.Е Учитель информатики и ИКТ
-82%
Источник: videouroki.net
Сумо лего: Схемы роботов EV3 и программы для соревнований
Сумо — одно из самых увлекательных соревнований роботов Лего Ev3. В данном соревновании робот должен вытолкнуть робота противника за круг при этом самому не выехать за границу круга.
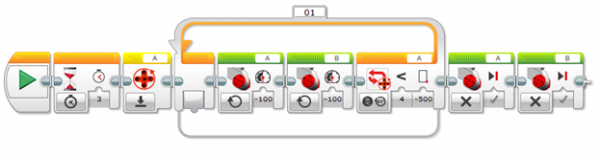
В самом начале соревнования роботы ставятся в центр круга, после страта программы запускаются и роботы должны подождать 3 секунды, после этого роботы должны доехать до границы круга и только потом они имеют возможность атаковать противника. Опишем алгоритм и программу Сумо для робота EV3 1 Действие.
Робот ждёт 3 секунды, отъезжаем от центра круга до границы, едем вперёд, крутимся, ищем врага, едем до врага, если едем от границы то отъезжаем назад. Ставим ожидание на 3 секунды. 
 3 действие.
3 действие.
После того как робот отъехал до границы он должен выдвинуться вперед. Движение вперёд. 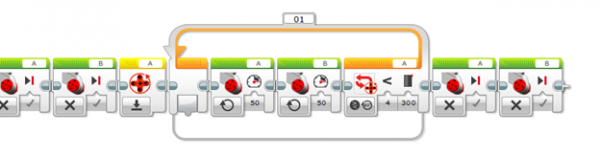 4 Действие. Ставим бесконечный цикл.
4 Действие. Ставим бесконечный цикл.
Робот будет атаковать врага, пока его не вытолкнет или пока не закончится время соревнования. в него ставим цикл вращение c ультразвуковым датчиком. (можно использовать и инфракрасный датчик) 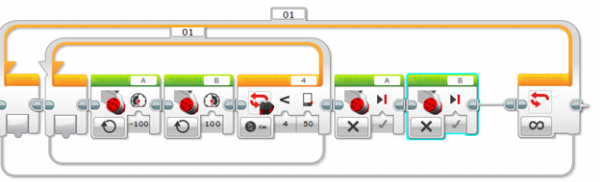 5 Действие. Едем вперёд до тех пор, пока датчик цвета не увидит чёрную линию, границу круга.
5 Действие. Едем вперёд до тех пор, пока датчик цвета не увидит чёрную линию, границу круга. 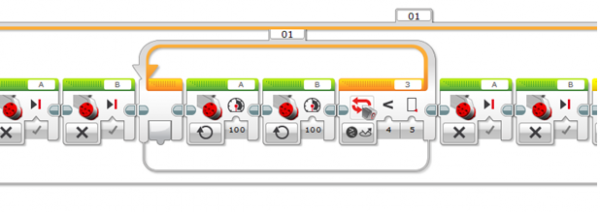 6 . Действие После того как увидели границу мы отъезжаем назад. Задание. Напишите отъезд назад сами, используя урок 1.Движение и повороты EV3 Другие схемы роботов lego ev3
6 . Действие После того как увидели границу мы отъезжаем назад. Задание. Напишите отъезд назад сами, используя урок 1.Движение и повороты EV3 Другие схемы роботов lego ev3
Хотите видеть на нашем сайте больше статей? Кликните Поделиться в социальных сетях! Спасибо!
Обратите внимание полезная информация.
ProRobot.RU — лучший информационный сайт по робототехнике. У нас есть информация про роботов: инструкции как собрать самому из лего или подручных средств. Мы находимся в России, но поможем Вам научиться создавать их своими руками. Понравилась информация — делитесь в социальных сетях с Вашими русскоговорящими друзьями в Беларусии или Казахстане или любой стране Мира!
Источник: www.prorobot.ru
Hunter

Урок №12 кур составляет разбор решения, наверное, самого популярного соревнования роботов — «Сумо». Главная задача робота-сумоиста состоит в том, чтобы вытолкнуть за пределы ринга своего соперника. Существует множество вариантов правил проведения этого состязания, накладывающих различные ограничения в первую очередь на размеры и конструкцию роботов, тем не менее, базовые алгоритмы поведения робота при этом очень похожи. Поэтому наш урок в значительной степени будет направлен на реализацию программы поведения, а в завершающей части урока рассмотрим некоторые советы по практической подготовке к соревнованию роботов.
12.1. Поле для проведения соревнования. Правила соревнования.
Для нашего урока мы возьмем то же самое поле, которое использовали при разборе Урока №11 — «Кегельринг» . Это поле представляет собой белый круг, ограниченный черной окружностью. С классическими правилами проведения соревнования «Сумо» по версии Российской ассоциации образовательной робототехники вы можете ознакомиться под спойлером ниже:
Регламент соревнований роботов «Сумо» по версии сайта RAOR.RU
12.2. Конструкция робота для соревнования «Сумо».
Базовое поведение робота в «Сумо» очень похоже на поведение робота в «Кегельринге». Роботу также необходимо найти внутри поля объект и вытолкать его за пределы круга. Различия, как водится, кроятся в деталях: теперь этот объект в свою очередь ищет нашего робота и тоже жаждет вытолкать его поскорее.
Наш учебный робот готов. Приступим к созданию программы робота-сумоиста. Замечательно, если у вас есть возможность отлаживать программу, используя ещё одного робота! Если же нет, то ничего страшного: можно задействовать в качестве соперника, например, радиоуправляемую модель автомобиля или те же кегли от «Кегельринга».
12.3. Создание программы для соревнования «Сумо».
Первая мысль, которая приходит в голову: использовать программу для «Кегельринга», внеся в неё косметические изменения. Действительно, алгоритмы поведения робота в «Кегельринге» и в «Сумо» очень похожи. Они реализуют поиск объекта и выталкивание его за пределы поля. Можно загрузить в робота-сумоиста программу для «Кегельринга», но работать такой сумоист будет не очень эффективно. Тем не менее, знания, полученные на предыдущем уроке, пригодятся нам сейчас.
Настало время загрузить в среду программирования наш проект «lessons-2», создать в нём новую программу «lesson-12» и подключить робота к среде программирования.
Поведенческую модель робота-сумоиста можно условно разделить на две части: поиск соперника и атака соперника. Сначала займемся реализацией первой части — поиска соперника.
Подробно пропишем последовательность действий нашего робота при обнаружении соперника на поле:
вращаться вокруг своей оси, пока впереди расположенный датчик не обнаружит соперника;
остановиться напротив соперника.
Эта последовательность действий полностью повторяет алгоритм поиска роботом кегли в «Кегельринге», но, так как, расстояние между роботами в «Сумо» может превышать расстояние от робота до кегли, то нам необходимо выбрать другое пороговое значение для используемого датчика.
Установим соперников на поле напротив друг друга, как показано на рисунке ниже.
Давайте протестируем получившийся алгоритм атаки! Для этого поместим нашего робота внутрь ринга, напротив установим неподвижного соперника и запустим программу атаки на выполнение. Наш робот должен уверенно вытолкать соперника за пределы ринга и остановиться над черной границей поля. Получилось? Значит наш сумоист верно контролирует границу ринга.
Проведем второй эксперимент: снова установим напротив робота неподвижного соперника и запустим программу атаки. Когда наш робот устремится к сопернику и приблизится достаточно близко, резко уберём соперника в сторону. Наш робот должен, потеряв соперника, остановиться.
Подведем итог: мы реализовали алгоритм поиска соперника и успешно его протестировали, также прошел проверку алгоритм атаки.
Законченная программа сумоиста должна в бесконечном цикле выполнять последовательно поиск соперника, а затем — атаку соперника. Можно было бы уже объединить обе части нашей программы, если бы не одно маленькое дополнение. Если наш робот остановился над границей ринга, то перед тем, как начать поиск, роботу следует, отъехав немного назад, вернуться внутрь ринга.
Дополним нашу программу атаки следующим кодом: за пределами цикла атаки, воспользуемся программным блоком «Переключатель» «Оранжевой палитры». Режим работы блока «Переключатель» установим в «Датчик цвета — Сравнение — Яркость отраженного света».
Параметры «Тип сравнения» и «Пороговое значение» установим аналогично ранее используемым в программном блоке «Датчик цвета» «Желтой палитры». Следовательно, если наш робот остановился над черной линией, то выполнение будет передано верхнему контейнеру программного блока «Переключатель».
Именно в верхний контейнер поместим программный блок «Рулевое управление» «Зеленой палитры», с настройками параметров, заставляющими робота отъехать назад на один оборот моторов. В нижний контейнер программного блока «Переключатель» поместим программный блок, выключающий моторы (Рис. 13). Повторно протестировав алгоритм атаки, убедимся, что после того, как робот-сумоист вытолкал соперника за пределы ринга, он вернулся немного назад.
Источник: robofinist.ru