


Введение:
Текущий урок мы посвятим изучению ультразвукового датчика. Данный датчик присутствует только в образовательной версии набора Lego mindstorms EV3. Тем не менее, пользователям домашней версии конструктора советуем тоже обратить внимание на данный урок. Возможно, что прочитав о назначении и использовании этого датчика, вы пожелаете его приобрести в дополнение к своему набору.
7.1. Изучаем ультразвуковой датчик
Главное назначение ультразвукового датчика, это определение расстояния до предметов, находящихся перед ним. Для этого датчик посылает звуковую волну высокой частоты (ультразвук), ловит обратную волну, отраженную от объекта и, замерив время на возвращение ультразвукового импульса, с высокой точностью рассчитывает расстояние до предмета.
УЛЬТРАЗВУКОВОЙ ДАТЧИК EV3 Умная остановка перед препятствием

Рис. 1
Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или в дюймах. Диапазон измерений датчика в сантиметрах равен от 0 до 255 см, в дюймах — от 0 до 100 дюймов. Датчик не может обнаруживать предметы на расстоянии менее 3 см (1,5 дюймов).
Так же он не достаточно устойчиво измеряет расстояние до мягких, тканевых и малообъемных объектов. Кроме режимов измерения расстояния в сантиметрах и дюймах датчик имеет специальный режим «Присутствие/слушать». В этом режиме датчик не излучает ультразвуковые импульсы, но способен обнаруживать импульсы другого ультразвукового датчика.
У нашего робота, собранного по инструкции small-robot-45544, ультразвуковой датчик уже закреплен впереди по ходу движения. Подключим его кабелем к порту «3» модуля EV3 и приступим к разбору практических примеров использования ультразвукового датчика.
Задача №14: написать программу, останавливающую прямолинейно движущегося робота, на расстоянии 15 см до стены или препятствия.
Для решения задачи воспользуемся уже знакомым нам программным блоком «Ожидание» Оранжевой палитры, переключив его в Режим: «Ультразвуковой датчик» — «Сравнение» — «Расстояние в сантиметрах» (Рис. 2). Само решение будет похоже на решение Задачи №7.

Рис. 2
Решение:
- Начать прямолинейное движение вперед (Рис. 3 поз. 1)
- Ждать, пока значение ультразвукового датчика не станет меньше 15 см. (Рис. 3 поз. 2)
- Прекратить движение вперед (Рис. 3 поз. 3)

Рис. 3
Задача №15: написать программу для робота, держащего дистанцию в 15 см от препятствия.
Решение:
Поведение робота будет следующим:
- при значении показания ультразвукового датчика больше 15 см робот будет двигаться вперед, стараясь приблизиться к препятствию;
- при значении показания ультразвукового датчика меньше 15 см робот будет двигаться назад, стараясь удалиться от препятствия.
Как добавить ультразвуковой датчик в ev3
Схемы крепления инфракрасного и ультразвукового датчика расстояния к роботу lego ev3
В этой статье мы разберем, как прикрепить инфракрасный или ультразвуковой датчик расстояния к роботу ev3. Датчик расстояния необходим роботу ev3 для определения расстояния до препятствия или другого робота. Датчик расстояния используется в роботах ev3 для Сумо. В зависимости от конструкции робота lego ev3, датчик расстояния нужно уметь крепить или сверху на балку или сбоку или спереди. Разберем все виды креплений ультразвукового или инфракрасного датчика
Крепление датчика расстояния к роботу ev3 сверху на балку
1 Крепление инфракрасного датчика расстояния к ev3 с помощью изогнутой балки уголка 

2 Крепление инфракрасного датчика расстояния к ev3 с помощью осей




Крепление датчика расстояния к роботу ev3 спереди к балке
1 Крепление инфракрасного датчика расстояния к роботу lego ev3 с помощью уголка

2 Крепление инфракрасного датчика расстояния к роботу lego ev3 с помощью переходных креплений и синих штифтов



Аналогично подключается ультразвуковой датчик расстояния к роботу ev3
Полезно почитать по теме крепление датчиков к lego ev3
Робот-манипулятор из Lego EV3, ультразвуковой датчик и перемещение предметов
В этой работе соберём робота-манипулятора из одного базового набора Lego EV3 и запрограммируем его движение. Главная задача манипулятора – положить некоторый предмет (мяч) в корзину. Для поиска корзины добавим ультразвуковой датчик, который использует принцип эхолокации при измерении дальности до объектов.


Оборудование: базовый набор Lego Mindstorms Education EV3, мячик для пинг-понга, ёмкость/корзина.
Описание. Манипулятор (лат. manipulare — руководить, управлять с помощью рук) — сложный механизм для управления положением предметов. Манипуляторы могут перемещать, вращать, переставлять, сортировать различные предметы.
В этой работе соберём робота-манипулятора из одного базового набора Lego EV3 и запрограммируем его движение.
Главная задача манипулятора – положить некоторый предмет (мяч) в корзину. Для поиска корзины добавим ультразвуковой датчик, который использует принцип эхолокации при измерении дальности до объектов. Корзины может и не быть, а рабочий сектор поиска руки манипулятора ограничен 180 градусами.
Нам нужно придумать такую программу, которая позволила бы решить поставленную задачу, не выведя манипулятор из строя (нужно вращать руку и корпус манипулятора только в рабочем диапазоне углов поворота).
Скачать инструкцию и программы v1.0
Язык программирования: EV3-G.
Чтобы скачать файлы, вы должны зарегистрироваться или войти на сайт, а также иметь платный аккаунт доступа. Если у вас есть действующий аккаунт доступа, ниже увидите кнопку для загрузки.
Как добавить ультразвуковой датчик в ev3
![]()
Введение:
Текущий урок мы посвятим изучению ультразвукового датчика. Данный датчик присутствует только в образовательной версии набора Lego mindstorms EV3. Тем не менее, пользователям домашней версии конструктора советуем тоже обратить внимание на данный урок. Возможно, что прочитав о назначении и использовании этого датчика, вы пожелаете его приобрести в дополнение к своему набору.
7.1. Изучаем ультразвуковой датчик
Главное назначение ультразвукового датчика, это определение расстояния до предметов, находящихся перед ним. Для этого датчик посылает звуковую волну высокой частоты (ультразвук), ловит обратную волну, отраженную от объекта и, замерив время на возвращение ультразвукового импульса, с высокой точностью рассчитывает расстояние до предмета.
Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или в дюймах. Диапазон измерений датчика в сантиметрах равен от 0 до 255 см, в дюймах — от 0 до 100 дюймов. Датчик не может обнаруживать предметы на расстоянии менее 3 см (1,5 дюймов).
Так же он не достаточно устойчиво измеряет расстояние до мягких, тканевых и малообъемных объектов. Кроме режимов измерения расстояния в сантиметрах и дюймах датчик имеет специальный режим «Присутствие/слушать». В этом режиме датчик не излучает ультразвуковые импульсы, но способен обнаруживать импульсы другого ультразвукового датчика.
У нашего робота, собранного по инструкции small-robot-45544, ультразвуковой датчик уже закреплен впереди по ходу движения. Подключим его кабелем к порту «3» модуля EV3 и приступим к разбору практических примеров использования ультразвукового датчика.
Задача №14: написать программу, останавливающую прямолинейно движущегося робота, на расстоянии 15 см до стены или препятствия.
Для решения задачи воспользуемся уже знакомым нам программным блоком «Ожидание» Оранжевой палитры, переключив его в Режим: «Ультразвуковой датчик» — «Сравнение» — «Расстояние в сантиметрах» (Рис. 2). Само решение будет похоже на решение Задачи №7.
- Начать прямолинейное движение вперед (Рис. 3 поз. 1)
- Ждать, пока значение ультразвукового датчика не станет меньше 15 см. (Рис. 3 поз. 2)
- Прекратить движение вперед (Рис. 3 поз. 3)
Задача №15: написать программу для робота, держащего дистанцию в 15 см от препятствия.
Поведение робота будет следующим:
- при значении показания ультразвукового датчика больше 15 см робот будет двигаться вперед, стараясь приблизиться к препятствию;
- при значении показания ультразвукового датчика меньше 15 см робот будет двигаться назад, стараясь удалиться от препятствия.
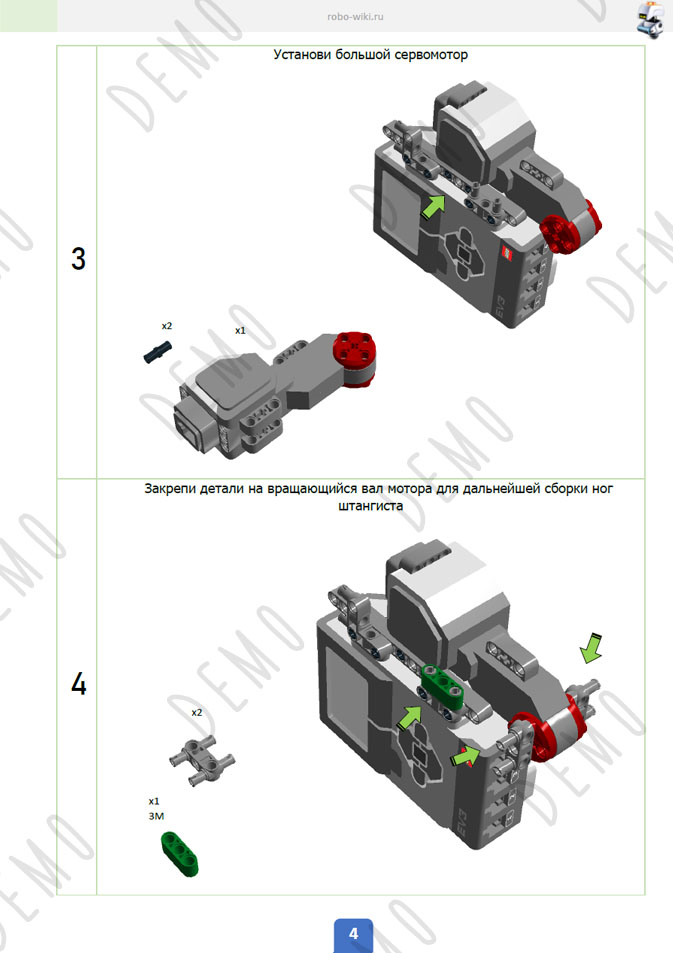
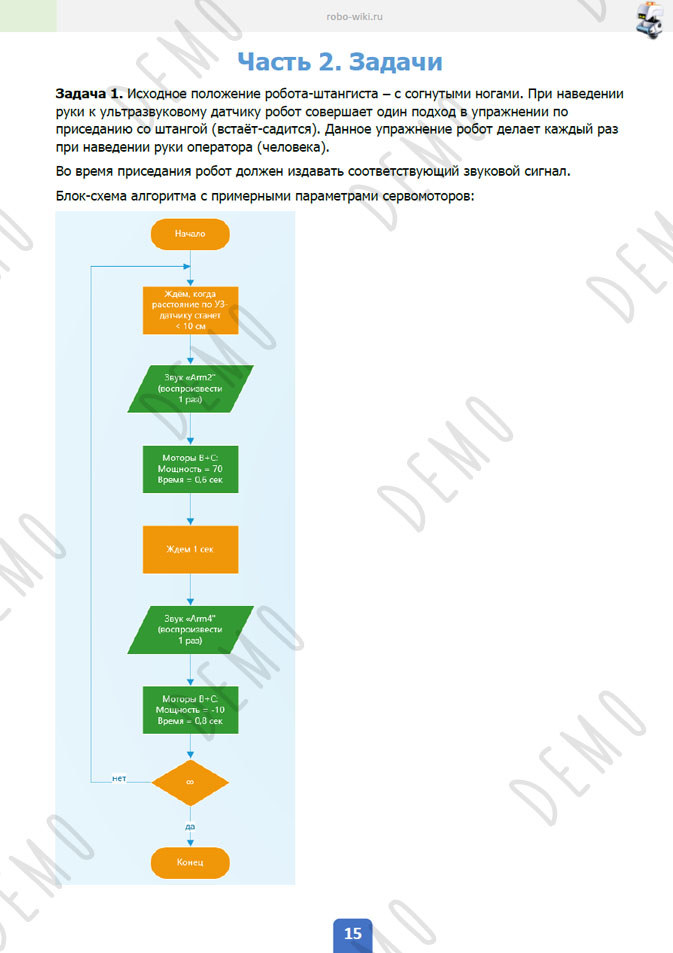
Робот штангист из Lego Education EV3 (ультразвуковой датчик и датчик цвета)
В этой работе закрепим знания и умения работы с числовыми и логическими переменными, с ультразвуковым датчиком и датчиком цвета на примере модели робота штангиста. Конструкция собирается из одного набора Lego Education EV3. Дети соберут модель по пошаговой инструкции и попробуют решить три задачи по готовым блок-схемам.



Оборудование: базовый набор Lego Mindstorms Education EV3.
Описание.
Приседания со штангой – базовое физическое упражнение на развитие силы ног. Атлет приседает и встаёт со штангой на плечах. Исходное положение – стоя.
Наш робот-штангист также решил поупражняться в приседаниях со штангой. Отличие от обычной техники приседания: исходное положение – сидя, штангу робот удерживает на вытянутых руках, ноги разведены в стороны.
Бедро левой и правой ноги робота – это балки в виде параллелограмма (параллелепипед, если говорить про объемную фигуру). Свойство параллельности противоположных сторон параллелограмма нам очень подойдёт для того, чтобы голень правой и левой ноги оставалась параллельной блоку EV3, т.е. туловищу робота-штангиста.
В нашей работе мы будем использовать два датчика – ультразвуковой датчик EV3, который измеряет расстояние до объектов методом эхолокации, и датчик цвета EV3, который может различать цвета.
Всего нужно решить три задачи, используя готовые блок-схемы.
Язык программирования: EV3-G.

Для подписчиков (старый способ)
Чтобы скачать файлы, вы должны зарегистрироваться или войти на сайт, а также иметь платный аккаунт доступа. Если у вас есть действующий аккаунт доступа, ниже увидите кнопку для загрузки.
Источник: robo-wiki.ru