
CADmaster
Главная » CADmaster №2(52) 2010 » Архитектура и строительство Robot работает на вас
Расчетный комплекс Autodesk Robot Structural Analysis Professional (RSA), предназначенный в первую очередь для расчета строительных конструкций и сооружений на прочность, устойчивость и динамические воздействия, появился в России сравнительно недавно.
На российском рынке программного обеспечения существует несколько хорошо зарекомендовавших себя программных комплексов для решения таких задач. Это и SCAD Office, и Лира, и Stark ES. Они имеют соответствующие сертификаты соответствия, прошли проверку временем. Некоторые активно используются в учебном процессе — к примеру, SCAD Office является основной учебных курсов на инженерно-строительном факультете Санкт-Петербургского государственного политехнического университета. Появляется закономерный вопрос: а чем, собственно, новоявленный комплекс может быть привлекателен для российского пользователя, у которого и без того есть достаточно широкий выбор?
Что такое робот? Робототехника для детей // What is a robot? (Eng Sub)
Во-первых, комплекс предоставляет возможность проектировать и оценивать работоспособность элементов конструкции в соответствии с многочисленными нормами (европейскими, американскими, азиатскими и другими, включая российские). Это немаловажно при выполнении международных проектов и подрядных работ для иностранных заказчиков.
Во-вторых, на выходе помимо стандартных результатов, включающих таблицы армирования железобетонных элементов, можно получить детально проработанные схемы армирования в виде чертежей и спецификаций.
В-третьих, многочисленные функциональные возможности представлены в рамках одного интерфейса, причем между программными модулями реализована тесная взаимосвязь. Например, после проведения вычислений РСУ, выделив интересующие элементы конструкции, можно запустить процесс подробного исследования несущей способности фрагмента металлоконструкции или подбора армирования для железобетонных элементов.
И, наконец, в-четвертых: один из рабочих языков — русский (включая встроенную интерактивную справочную систему), что не может не порадовать отечественного пользователя.
Из-за насыщенности интерфейса и разнообразия предоставляемых возможностей комплекс многолик и достаточно сложен в освоении. Но, как показывает опыт, все усилия, затраченные на обучение, окупают себя с лихвой.
Впрочем, от слов к делу: совершим небольшой экскурс по функциональным возможностям RSA.
Программа запускается как обычное приложение Windows.
Для начала пользователю предлагается определиться, что собственно является предметом его исследований (рис. 1).

Рис. 1. Набор пиктограмм для выбора типа выполняемого проекта
В первых двух рядах представлены варианты расчетных схем конструкций. Вид иконок отражает характер схемы. Это (по порядку следования) плоская рама, плоская ферма, ростверк, пространственная ферма, пространственная рама, сооружение, плита, оболочка, конструкция в плоско-напряженном состоянии, конструкция в состоянии плоской деформации, осесимметричная конструкция и объемная конструкция (представляется объемными конечными элементами — например, в форме тетраэдра или «кирпича»).
Ералаш Робот-учитель (Выпуск №229)
Следующие семь иконок соответствуют несложным, но часто используемым видам анализа: проектирование железобетонной балки (ЖБ балки), ЖБ колонны, одиночного фундамента, ленточного фундамента, ЖБ балки-стенки, ЖБ стенки и ЖБ плиты.
RSA имеет встроенный механизм экранов — специально разработанных систем диалоговых окон, средств визуализации и таблиц. Они используются для выполнения определенных действий, повышают эффективность создания и расчета конструкции, делают эту работу в достаточной мере интуитивной.
В то же время все действия могут выполняться и без использования экранов.
Чтобы понять технологию работы в ПО RSA, достаточно рассмотреть простой пример — например, процесс проектирования ЖБ балки. Для этого в ответ на предложение определиться с типом проекта (рис. 1) активируем кнопку с пиктограммой ЖБ балки (третий ряд, первая слева). RSA загружает соответствующую систему окон для формирования данных по проекту (рис. 2).
Перед тем как приступить к выполнению проекта, нужно подкорректировать рабочие настройки среды (рис. 3). Сказанное, в частности, касается опций Единицы и форматы, Материалы, Базы данных и Нормы проектирования.
Определившись с перечисленными параметрами (в данном случае как меры длины выбраны метры (m), силы — килоньютоны (kN), а в качестве норм, регламентирующих армирование в железобетонных элементах, — СНИП 2.03.01−84), переходим непосредственно к формированию данных.
В соответствии с технологией, предлагаемой SRA, порядок действий определяется списком (рис. 4).
Последовательно переходя от одного пункта к другому и заполняя предлагаемые формы, определяем геометрию многопролетной балки, уточняя длины пролетов и параметры сечений, вводим ослабления (различного рода отверстия) — рис. 5.
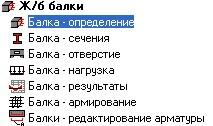
Рис. 5. Формирование геометрического образа ЖБ балки
Затем прикладываем нагрузки (рис. 6) и задаем опции расчета, определяющие общие параметры армирования балки (рис. 7).
Далее задаем шаблоны армирования, детализирующие распределение арматуры в балке (рис. 8).
Перед тем как провести расчет и получить схему армирования, настраиваем опции расчета (рис. 9).
По окончании расчета просматриваем результаты в виде эпюр (рис. 10), схемы армирования в 3D-виде (рис. 11−12) и результирующие чертежи (рис. 13).
В заключение формируем пояснительную записку, где с регулируемой подробностью отражаются все этапы подготовки расчетной схемы и приводятся результаты (рис. 14).
Таким образом, в процессе решения задачи пользователь выполняет предлагаемую RSA последовательность шагов, получает результат и формирует исчерпывающий отчет.
Расчетные возможности RSA охватывают весь спектр задач, встречающихся в строительной практике:
- линейный статический расчет;
- динамический расчет (модальный анализ, анализ сейсмического воздействия на конструкцию, расчет спектрального отклика, расчет амплитудно-частотных характеристик при внешнем гармоническом воздействии);
- расчет конструкции на устойчивость;
- прямое интегрирование уравнений движения при воздействии кратковременных нагрузок (расчет переходного процесса);
- решение нелинейных задач статики, связанных как с нелинейным поведением материала, так и с геометрической нелинейностью.
Среди множества других есть и возможность выполнять расчеты для подвижной нагрузки.
В качестве примера рассмотрим расчет однопролетного моста (рис. 15).
На этот раз в качестве рабочих установок принимаем следующие: код проектирования — Eurocode, база данных сечений — European section database (EURO). В качестве единиц физических величин используем метры (m) и килоньютоны (кN).
На рис. 16−19 представлена последовательность создания расчетной схемы моста средствами RSA.
Настил моста представляет собой прямоугольную железобетонную плиту. Задаем контур с соответствующими координатами, а затем присваиваем ему свойства плиты, определяемые в диалоговом окне (рис. 16).
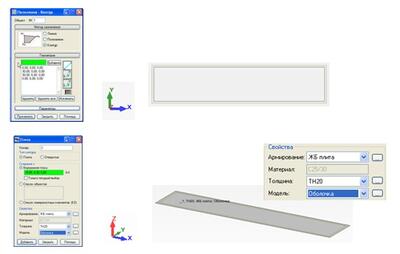
Поведение железобетонной плиты характеризуют четыре параметра: толщина, механические свойства материала, модель работы пластинчатого элемента под нагрузкой и схема армирования.
Далее задаются граничные условия — в данном случае фиксируются от смещения и поворотов короткие торцы по всей их длине.
После этого переходим к построению ферменной решетки моста. RSA предоставляет возможность воспользоваться автоматическими генераторами типовых конструкций. Задействовав эту опцию, строим ферму вдоль одной из сторон моста, а затем, путем копирования, получаем аналогичную вдоль другой стороны (рис. 18).
Далее, дополнив конструкцию верхней обвязкой (здесь можно совмещать функции отрисовки стержней путем привязки их к узлам с последующим копированием), получаем итоговую геометрию моста (рис. 19).
Следующий шаг: создаем нагружения, действующие на конструкцию.
В RSA сначала задаются типы нагружений в соответствии с классификацией, принятой для тех или иных норм (идентификация нагружений по типам необходима при формировании расчетных сочетаний усилий), а затем каждое из нагружений наполняется конкретными нагрузками. Исключение составляет нагрузка, обусловленная весом элементов конструкции (постоянная). Эта нагрузка формируется автоматически, но при необходимости ее можно скорректировать, как это считает нужным пользователь.
Добавим в список также три временных нагружения (Live1 — они будут иметь имена ЭКСП.1, ЭКСП.2 и ЭКСП.3, а также два ветровых с именами ВЕТЕР1 и ВЕТЕР2).
Для примера на рис. 20 представлено четвертое нагружение — равномерная поверхностная нагрузка, действующая на плиту моста в пределах прямоугольной полосы.
После формирования нагружений проводим расчет.
На рис. 21−25 показаны результаты статического расчета для нагружения 1 (собственный вес).
RSA располагает богатыми возможностями представления результатов. Для стержневых элементов это эпюры силовых факторов (рис. 21) и карты, то есть цветовое отображение в соответствии с палитрой (рис. 22), для пластин — карты и разрезы (рис. 23).
Также можно детализировать результаты и получить эпюры для отдельных стержней (рис. 25).
Результаты можно представить в виде таблиц и, при желании, изменить набор выводимых полей (рис. 26).
Для оценки работоспособности стержневых элементов конструкции и подбора оптимальных сечений необходимо выполнить некоторые предварительные операции по присвоению стержням типов. Тип определяется набором параметров, которые назначаются исходя из условий работы стержневых элементов. К таким параметрам относятся коэффициент расчетной длины для разных плоскостей изгиба, предельные значения гибкости и прогибов, а также ряд других.
Сформируем два дополнительных типа элементов. Ограничимся назначением коэффициентов расчетной длины (рис. 27: для типа «Пояс» назначаем коэффициент 0,9, а для типа «Раскос» — 0,8).
Рис. 27. Формирование новых типов стержневых элементов
Для назначения стержням типов (и проведения других операций — например, унификации по сечениям) удобно заранее определить группы стержней. Это делается с помощью Инспектора объектов. Сформируем пять групп стержневых элементов, предварительно настроив графический фильтр (рис. 28).
Переходим непосредственно к этапу оценки работоспособности конструкции с последующей ее оптимизацией (то есть к этапу проектирования).
В окне Определение (рис. 29) формируем группы унификации стержневых элементов: для каждой группы определяем список элементов, имя, выбираем материал и набор сечений, из которого будет выбираться оптимальное.
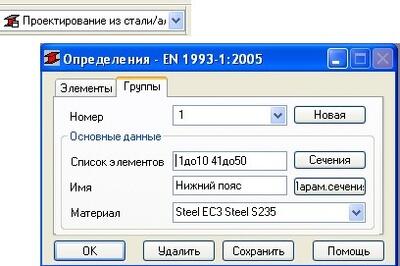
Рис. 29. Формирование групп унификации стержневых элементов
Затем в окне Расчеты (рис. 30) задается тип расчета (в данном случае — проектирование группы), определяется список групп, которые будут рассматриваться, назначается определяющий критерий при подборе сечений (в нашем примере — вес), список нагружений и критерий оценки (по предельному состоянию 1-й группы).
Следующий шаг — расчет.
В результате получаем оптимальное сечение по каждой группе унификации (на рис. 31 оно обозначено голубым цветом).
Также для справки показаны два ближайших (по критерию подбора) варианта, один из которых не проходит по какому-либо критерию предельного состояния (выделен красным цветом), а другой, выделенный зеленым цветом, полностью соответствует требованиям, но не является оптимальным.
С предлагаемым вариантом можно согласиться — в этом случае происходит замена сечений и требуется новый расчет.
По итогам расчета можно сгенерировать пояснительную записку, где в подробном виде приводятся все проверки стержневого элемента со ссылками на пункты нормативного документа (рис. 32).
По итогам всех видов расчета формируется отчет, степень подробности которого можно варьировать в широких пределах (рис. 33−34).
Заканчивая краткий обзор возможностей комплекса, можно сделать вывод, что Autodesk Robot Structural Analysis Professional представляет собой универсальный, с удобным и интуитивно понятным интерфейсом инструмент расчета строительных конструкций. Он позволяет проводить все необходимые виды расчетов и получать на выходе результаты как в графическом представлении, так и в табличном, а также формировать отчеты в необходимом пользователю виде.
Наличие русскоязычного интерфейса и подробной интерактивной справочной системы (также на русском языке), поддержка многочисленных норм проектирования (в том числе отечественных) и баз данных (по материалам, сечениям, грунтам делает новый расчетный комплекс весьма привлекательным для российского пользователя.
Источник: www.cadmaster.ru
Robot программа что это
Autodesk® Robot™ Structural Analysis 2012 (в файлах справки ссылка на имя Robot ) – это интегрированная графическая программа для моделирования, расчета и проектирования конструкций различного типа. Программа позволяет создавать модель конструкции, производить ее расчет и анализировать результаты расчета. Так же, имеется возможность для проектирования конструкции и создания отчетной документации для уже спроектированной и рассчитанной конструкции.
Для того, чтобы обеспечить эффективную работу в программе Robot , необходимо иметь:
для 32-битной операционной системы:
Microsoft ® Windows ® Vista 32-битная или 64-битная
Microsoft ® Windows ® XP SP2 Pro
Microsoft ® Windows 7
Рекомендуется: Windows XP Pro (+SP 2)
Intel Pentium IV (или выше) с частотой 3 ГГц; также поддерживаются мультипроцессорные системы и процессор Dual Core
Рекомендуется: Intel ® Core2 Duo 3 ГГц или выше
3 Гб оперативной памяти.
3 Гб оперативной памяти.
Приблизительно 5 Гб свободного места на диске после установки
Для продвинутых пользователей 10 Гб свободного места на диске, после установки.
1280 x 1024 True Color
Рекомендуется: 1600 x1200 или выше
и видеоадаптер OpenGL 1,4 или выше и DirectX 9 или выше
Необходим для регистрации лицензии
Необходим при установке программы
для 64-битной операционной системы:
Microsoft ® Windows ® 7, 64-битная
Microsoft ® Windows ® XP x64 Pro
Microsoft ® Windows® 7, 64-битная
Рекомендуется: Microsoft ® Windows ® XP x64 Pro
Intel Pentium IV (или выше) с частотой 2 ГГц; также поддерживаются мультипроцессорные системы и процессор Dual Core
Рекомендуется: Intel ® Core 2 Duo 2.4 GHz
4 Гб оперативной памяти.
Рекомендуется: 8 Гб оперативной памяти.
Приблизительно 5 Гб свободного места на диске после установки
Для продвинутых пользователей 10 Гб свободного места на диске, после установки.
1280 x 1024 True Color
Рекомендуется: 1600×1200 и выше и видеоадаптер OpenGL 1,4 или выше и DirectX 9 или выше
Необходим для регистрации лицензии
Необходим при установке программы
Чтобы правильно вывести на печать отчетную документацию результатов по программе Robot , необходимо иметь текстовый редактор, поддерживающий файлы формата *.rtf (полный текстовый формат). Рекомендуется MS Word версии 6.0 и выше или пакет WordPad, который включен в стандартную установку Windows.
Ниже перечислены основные возможности системы Robot .
- Полное графическое создание конструкции в графическом редакторе. Можно загружать файлы формата DXF, содержащие информацию о геометрии конструкции, подготовленную в другой графической программе.
- Возможность отображения на графическом экране схемы спроектированной конструкции и различных результатов расчета (усилий, перемещений).
- Поддерживается одновременная работа с несколькими окнами на одном экране. Возможность параллельного расчета и проектирования нескольких конструкций.
- Статический и динамический расчет конструкций.
- Возможность назначения типов стержней в процессе определения конструкции вместо назначения их в модулях проектирования.
- Возможность произвольной компоновки материалов для вывода на печать. Это относится к таким материалам, как пояснения к расчету, захваты экрана, формирование распечатки, передача объектов другим программам.
Robot состоит из нескольких модулей, каждый из которых выполняет определенный шаг в расчете конструкции: создание модели конструкции, ее расчет и проектирование.
Источник: docs.autodesk.com
Robot Framework для автоматизации тестирования: ограничения и плюшки
В автоматизации тестирования я уже более 11 лет. Скажу сразу, что являюсь поклонником старомодного тестирования на Java и очень настороженно отношусь к различным готовым фреймворкам. Если вы придерживаетесь такого же мнения или только задумываетесь об использовании Robot Framework, в этой статье я постараюсь рассказать вам о его ограничениях и, конечно же, опишу все его достоинства.
Я столкнулся с Robot Framework около года назад. Перед нами стояла задача силами двух инженеров автоматизировать довольно большой объем тестов в сжатые сроки, т.к. ручная регрессия перестала влезать в разумные рамки. Сам проект связан с пожарной безопасностью. Тестировать предстояло Web-часть в трех браузерах и Mobile-часть на множестве iOS и Android телефонов и планшетов.
Помимо этого, в наличии были тесты, которые взаимодействовали и с Web, и с Mobile. Конечно, это не ракету построить, но и не совсем тривиально. Честно скажу, я сопротивлялся, мы долго думали и в итоге, по совокупности внутренних и внешних факторов, выбрали Robot Framework.

Пара слов и картиночек для знакомства с Robot Framework
Прежде чем разбирать плюсы и минусы, давайте очень коротко поговорим о том, что же такое Robot Framework. Возможно, кто-то впервые видит это название.
Robot Framework – это keyword-driven фреймворк, разработанный специально для автоматизации тестирования. Он написан на Python, но для написания тестов обычно достаточно использовать готовые ключевые слова (кейворды), заложенные в этом фреймворке, не прибегая к программированию на Python. Нужно лишь загрузить необходимые библиотеки, например, SeleniumLibrary, и можно писать тест. В этой статье я дам общее представление о Robot Framework, но если после прочтения вы захотите углубиться в тему, то советую обратиться к официальной документации. В конце статьи также приведены ссылки на популярные библиотеки.
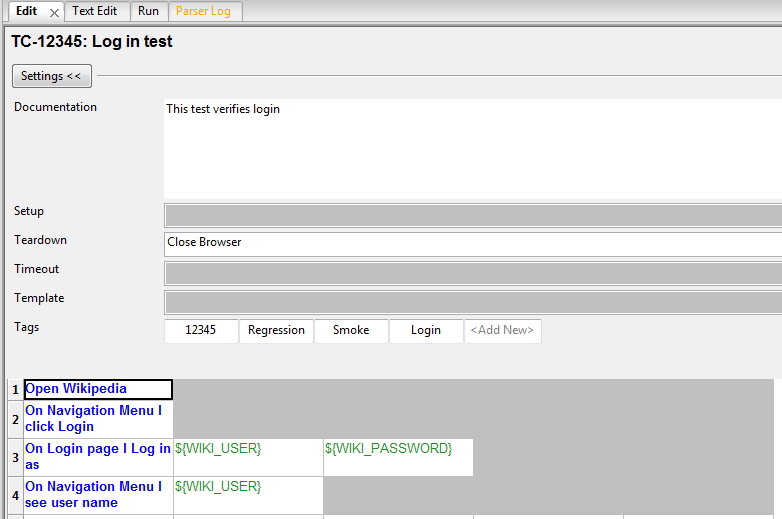
Что ж, перейдем к «картиночкам». Вот так может выглядеть простой проект в IDE (на примере всеми любимой Википедии):
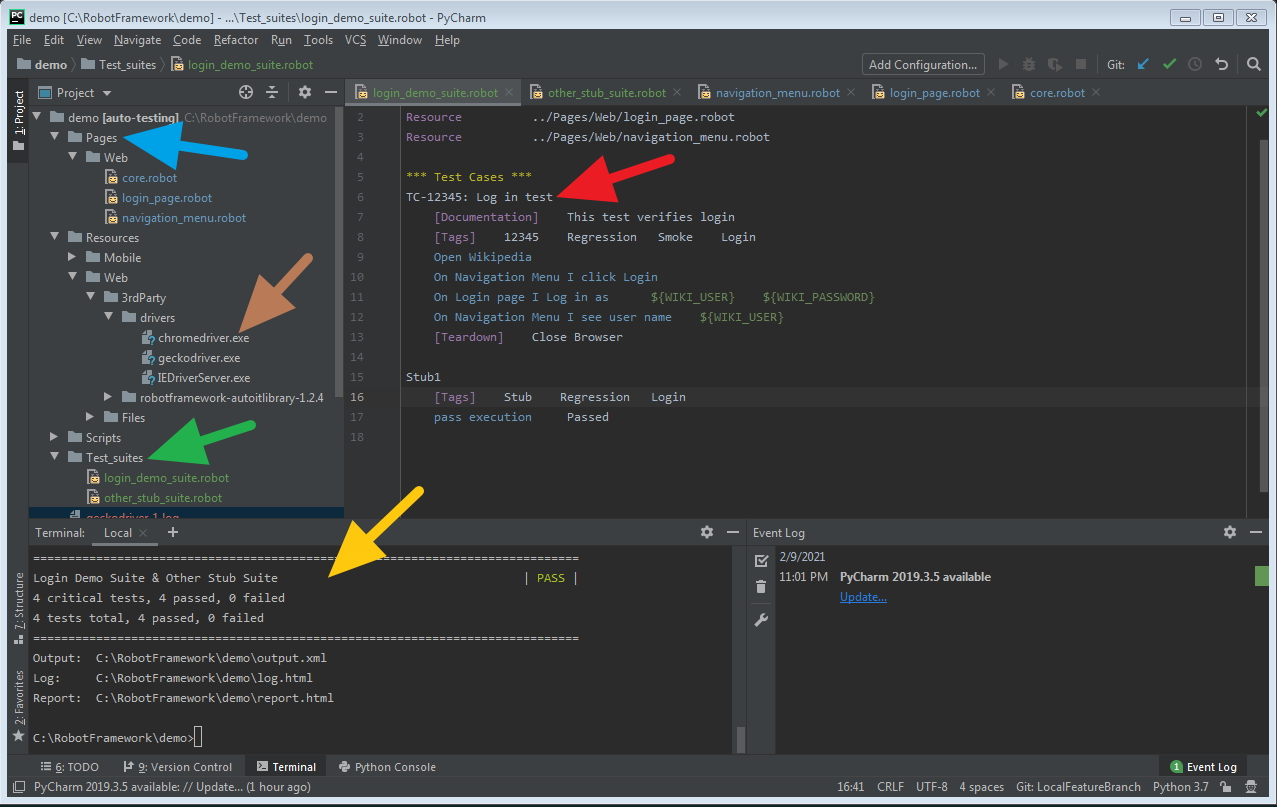
- Синий и зеленый – папки с файлами для описания страниц и тестов соответственно. Так можно реализовать page object паттерн.
- Коричневый – драйвера для различных браузеров.
- Красный – тело теста.
- Желтый – консоль, из которой можно запускать тесты и видеть консольные сообщения (полноценные логи не тут, но об этом позже).
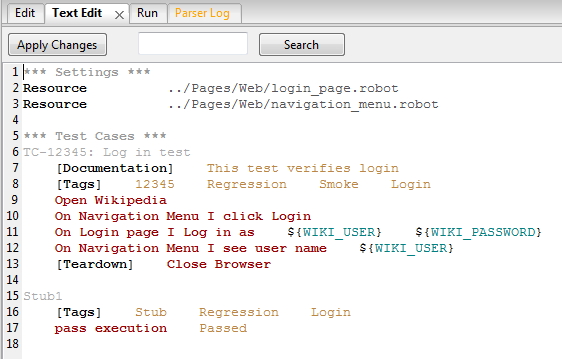
Как видно, в тесте сплошные «обертки» в стиле BDD (можно не применять такой синтаксис, но лично мне он тут кажется удобным). Имплементация находится в объектах страниц, например:

В стандартной секции Settings мы видим подгрузку библиотеки для работы с Selenium, а в другой стандартной секции Keywords находятся имплементации наших самописных ключевых слов.
Думаю, для получения общего представления этого достаточно. Детальное описание работы с Robot Framework лежит за рамками моего поста
Плюсы и минусы
В этой части я расскажу о плюсах и минусах Robot Framework, с которыми столкнулась наша команда. Учитывая специфику задач на проекте, наверняка у вас будут и свои «подводные камни». Я буду перечислять, двигаясь, на мой взгляд, от более значимого достоинства/недостатка к менее значимому.
Плюшки
Низкий порог входа
Как я уже писал выше, Robot Framework является keyword-driven фреймворком, а не языком программирования. Хоть синтаксис и схож с Python, знаний программирования требуется несколько меньше или, скажем так, их применение не обязательно там, где это позволяет сложность самой задачи. Однако, при необходимости можно пользоваться переменными, циклами, функциями, возвращающими значения, и т.п. Ближайшими альтернативами могут показаться Pytest и Selenide, но они требуют большей подготовки пользователя, нежели Robot Framework. Например, одной из встроенных стандартных библиотек является BuiltIn. Там вы можете найти такие кейворды как Sleep, Log, Run Keyword If, Should Be Equal As Strings и т.п. и написать что-то вроде:
Run Keyword If ‘$’ == ‘PASS’ SomeAction
Поддержка Web и Mobile
Robot Framework неплохо работает в связке Mobile+Web (как end-to-end, так и атомарные тесты).
Наши Web тесты работают с Chrome, FF и IE. Мобильная часть работает как с локальными реальными устройствами на Android и iOS, так и с устройствами с фермы SauceLabs. Ограничение – реальное локальное iOS-устройство можно тестировать только с Mac. И вообще iOS требует гораздо больше внимания, ведь тот же веб-драйвер для него надо пересобирать самостоятельно. (Тестирование iOS – это отдельная большая тема, и если интересно, дайте знать в комментариях, мне есть о чем рассказать)
Тэги
Есть возможность задавать тестам тэги. Тэгами может быть любая информация, которая пригодится нам для идентификации теста: ID теста, список компонент, к которым относится тест, и т.п. Этим мы обеспечиваем связь тестов с тестами или требованиями (traceability) и задаем необходимую информацию для конфигурирования запуска тестов. Указав в запускалке один тэг, мы можем запустить все тесты, которые относятся к определенному компоненту, или же можем при запуске явным образом перечислить тест-кейсы, которые надо запустить (удобно при регрессионном тестировании). Подробнее про тэги по ссылке.
Хорошие отчеты из «коробки»
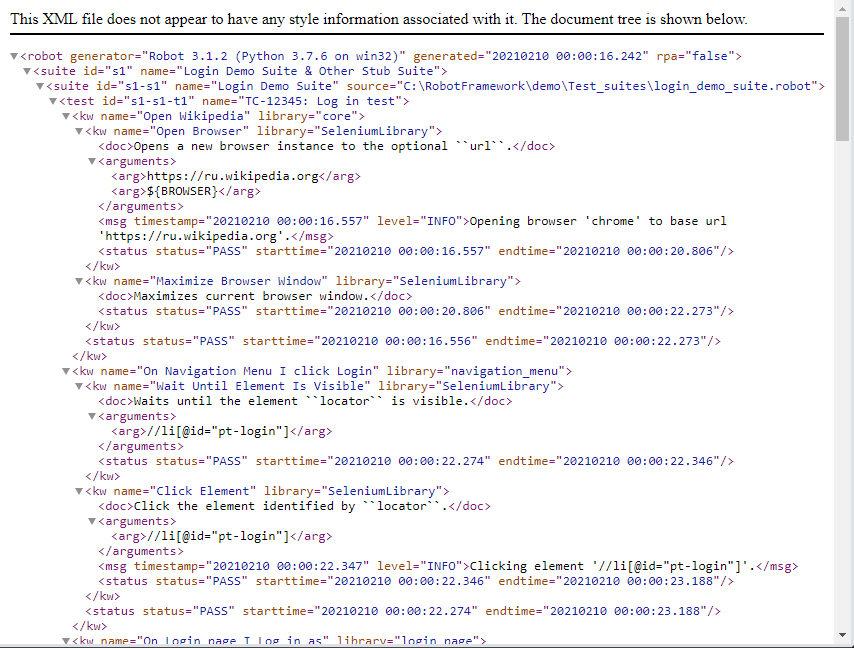
Для предоставления стандартной отчетности ничего придумывать не надо. Отчеты создаются автоматически без единой дополнительной команды. Есть возможность объединения результатов разных тестовых прогонов. В результате прогона по умолчанию создаются три файла:
- Output.xml – результаты тестов в формате XML. Пригодятся для мерджа результатов командой rebot. Пример:
- Log.html – подробные результаты в HTML-формате. Полезны больше для разработчиков тестов. Пример:
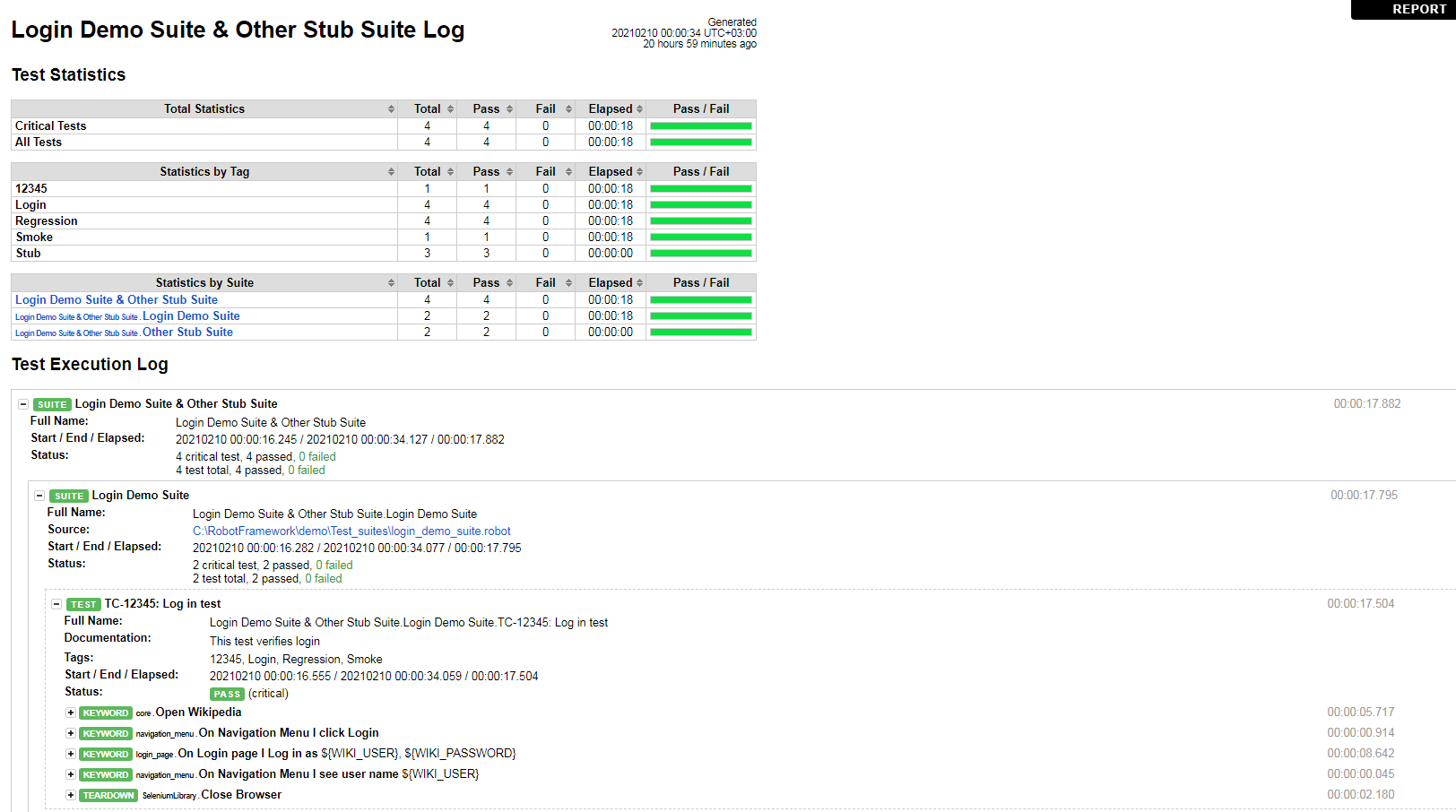
- Report.html – высокоуровневые результаты без подробной детализации. Полезны для демонстрации людям «со стороны» и менеджменту. Пример:

BDD из «коробки»
Синтаксис Gherkin языка с его нотациями Given, When, Then и And включен по умолчанию, и любой шаг может быть записан как в этой нотации, так и без нее. Можно использовать нотации или нет – тесты просто игнорируют их. К примеру, эти два кейворда с точки зрения фреймворка идентичны:
Welcome page should be open
And welcome page should be open
Page Object паттерн
Robot Framework позволяет реализовать Page Object паттерн не при помощи ООП, а при помощи синтаксиса ключевых слов. Смысл в том, чтобы последовательно в кейворде указывать, с какой страницей мы работаем -> с какой областью внутри нее мы работаем -> с каким контролом работаем и что мы с ним делаем. Пример:
On Main page on Users tab I click Create user icon
где кейворд “On Main page on Users tab I click Create user icon” хранится в отдельном робот файлике, скажем, с названием mainPage.robot. Этот файлик мы подгружаем в наш файл с тестами по необходимости.
См. также пример из секции «Пара слов и картиночек для знакомства с Robot Framework».
Параллельный запуск
Параллельный запуск становится возможным благодаря альтернативной запускалке тестов под названием Pabot. Стандартным предустановленным способом является команда robot. Естественно, тесты должны быть на это рассчитаны и не должны влиять друг на друга
Грабли
Отсутствует возможность отладки встроенными средствами
Имеется ввиду классическая расстановка брейкпоинтов. Приходится либо выводить что-то дополнительное в лог, либо ставить временные слипы и так обходить эту проблему. В сети описаны некоторые способы прикрутить дебаг, но для уровня целевой аудитории Robot Framework это сложновато.
Не поддерживается AWS
AWS (Amazon Web Services – коммерческое публичное облако, ферма мобильных устройств) не поддерживает тесты на Robot Framework. AWS работает таким образом, что код исполняется на стороне Amazon, и тесты в формате Robot Framework не допустимы. Зато другая ферма, SauceLabs, устроена по другому принципу и прекрасно работает с Robot Framework (есть проблемы с администрированием их сервиса из России, но они решаются общением со службой поддержки или работой под VPN).
IDE сложности
RIDE (Robot IDE), специальная IDE для Robot Framework, мягко говоря, сырая. Режим работы в табличном виде (как раз для воплощения идеи keyword-driven фреймворка) выглядит так:
Режим работы в редакторе текста:
Ни в одном из двух предлагаемых режимов работать невозможно. Приложение периодически «падает» (хотя на других проектах такого нет). В режиме текста нет элементарного Go to Definition. В режиме таблиц Go to Definition есть, но сам этот режим крайне неудобен для средних и больших проектов.
PyCharm работает лучше, но, к сожалению, существующие плагины не справляются с автокомплитом некоторых библиотек (например, SeleniumLibrary)
Плохая поддержка сторонних библиотек
Готовые, уже существующие в сети библиотеки зачастую не поддерживаются. Пользователей мало, и они переходят в разряд зомби. Например, работа с почтой, сравнение скриншотов и т.п. Можно, конечно, написать свои библиотеки на чистом Python (и Robot Framework это позволяет), но смысла в такой схеме остается мало.
Справедливости ради стоит сказать, что нам для наших целей не пришлось писать ничего на Python и хватило добытых не без труда готовых библиотек.
Выводы

Выбор инструмента Robot Framework для нашего проекта был абсолютно верным и позволил выполнить наши обязательства в срок и с надлежащим качеством. Однако, надо понимать, что это, конечно же, не «серебряная пуля», есть много «но», которые надо иметь в виду.
Инструмент – это всего лишь средство для достижения поставленной цели, и не всегда надо микроскопом забивать гвозди, даже если это выглядит эффектно. Ругать или нахваливать Robot Framework я не берусь. Скажу лишь, что это хороший инструмент для своих целей
- Robot Framework User Guide
- SeleniumLibrary
- BuiltIn
- AppiumLibrary
- Collections
Источник: habr.com
Расчеты и проектирование строительных конструкций при помощи Autodesk Robot Structural Analysis Professional

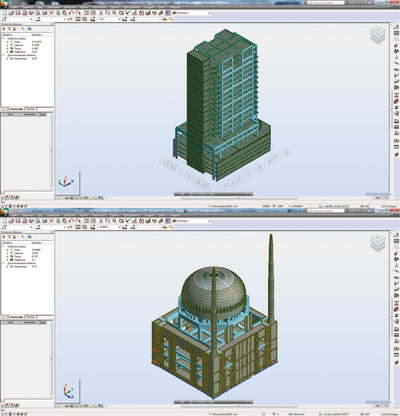
Autodesk Robot Structural Analysis — это комплекс конечноэлементного расчета и проектирования, созданный специально для инженеровконструкторов в области строительного проектирования. Продукт представляет собой решение «всё в одном», предлагая специалистам, выполняющим прочностные расчеты, инструменты для решения различных задач (рис. 1).
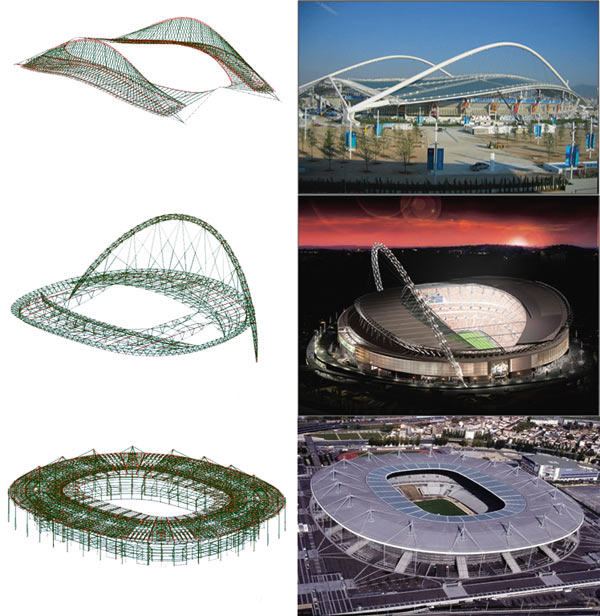
Рис. 1. История развития Autodesk Robot Structural Analysis: а — олимпийский стадион «Спирос Луис», Афины (Греция); б — стадион «Уэмбли», Лондон (Англия); в — стадион «Стад де Франс», Париж (Франция)
С уверенностью можно сказать, что современная версия Autodesk Robot Structural Analysis является результатом многолетнего развития и опыта использования этого продукта. Первой коммерческой версией решения компании Robobat стал вышедший в 1985 году Robot Structures. Спустя шесть лет следующая версия Robot Structures под названием Robot V6 поставлялась уже в 40 стран мира. Далее были версии Robot 97 и Robot Millennium.
С каждой новой версией программа делала шаг вперед как в функциональности, так и в удобстве использования. Всё это в 2008 году привело к тому, что права на программу приобрел всемирно известный лидер в области САПР — компания Autodesk. Тогда она получила название Autodesk Robot Structural Analysis и стала важным звеном комплексного BIMрешения Autodesk.
За годы применения в различных строительных проектах, среди которых такие грандиозные, как олимпийский стадион «Спирос Луис» в Афинах, стадионы «Уэмбли» в Лондоне и «Стад де Франс» в Париже, виадук «Милло» во Франции, и многие другие, программный продукт продемонстрировал свои выдающиеся возможности, что является для него самой лучшей рекомендацией.
Возможности Autodesk Robot Structural Analysis
Говоря о таком сложном комплексе, как Autodesk Robot Structural Analysis, в одной статье перечислить все его функции вряд ли получится, но об основных мы постараемся рассказать.
Большинство программ для расчетов привязано к определенным регионам и локализовано под них, но Autodesk Robot Structural Analysis не ограничен в своих возможностях: он позволяет работать на большом количестве языков, используя различные нормы проектирования. Autodesk Robot Structural Analysis — это уникальное приложение, в котором можно независимо задавать региональные настройки (нормы, базы данных), рабочий язык и язык распечатки.
Прежде всего следует отметить удобный и дружественный современный интерфейс, который может быть настроен пользователем в соответствии с его требованиями, начиная от языка, цвета рабочего экрана и меню до необходимых единиц измерения и стилей печати.
Создание модели конструкции является одним из самых трудоемких этапов при подготовке к процессу расчета. Назначение разбивочных осей позволяет необходимым образом разметить рабочее пространство модели для удобства при дальнейшем размещении конструктивных элементов.
Доступны следующие типы конструкций:
- стержневые (фермы, рамы, ростверки с учетом упругого основания);
- поверхностные (пластины, оболочки, плоское напряженное состояние, плоская деформация, осевая симметрия);
- конструкции из объемных элементов;
- смешанные конструкции (стержни + плиты /оболочки + объемные элементы).
Базы данных металлопроката позволяют использовать необходимые типы сечений разных стран, в том числе СНГ и России, а конструктор сечений помогает в нестандартных ситуациях.
Программа предлагает очень широкие возможности по выбору материалов для элементов конструкций — как стандартных, взятых из готовых библиотек, так и заданных по определенным параметрам самим пользователем. Кроме того, можно использовать библиотеки типовых конструкций для быстрого параметрического моделирования таких объектов, как фермы различной геометрии, рамные конструкции, плиты и оболочки.
Панель редактирования дает возможность пользоваться привычными для любого графического редактора опциями перемещения, вращения, копирования, разделения и т.д.
Разнообразные варианты определения и приложения нагрузок позволяют задавать всевозможные воздействия (статические, динамические, сейсмические, гармонические, температурные, подвижные) на расчетную конструкцию. Библиотека основных нагрузок от стандартных строительных материалов обеспечивает ускорение процесса определения и назначения веса на покрытия и перекрытия. В процессе расчета используются как автоматические, согласно выбранным нормам, так и ручные сочетания нагрузок.
Широк и набор граничных условий, позволяющий в полной мере воспроизвести модель опирания конструкции.
Одним из важнейших преимуществ программы является автоматизированное, использующее самые передовые алгоритмы разбиение сетки КЭ. Сетка выполняется быстро и качественно. Ручное создание параметров сетки КЭ может быть выполнено независимо для каждой пластины с применением методов Кунса и Делано в тех случаях, когда в этом есть необходимость.
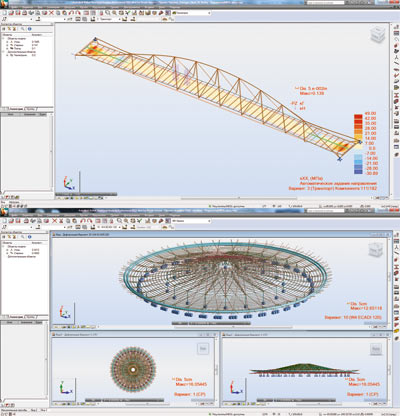
Для поверхностных элементов выполняется разбиение сетки на трех и четырехугольные КЭ, для объемных элементов — на четырех и восьмиугольные КЭ. В характеристических точках для сгущения сетки КЭ применяются эмиттеры (рис. 2).
Типы выполняемых расчетов весьма многообразны. Среди них — статический расчет (линейный и нелинейный), динамический расчет (расчет форм колебаний, гармонический, сейсмический, спектральный, временной), анализ предельного равновесия. Применение передовых расчетных алгоритмов обеспечивает ускорение и оптимизацию расчетов на современных многоядерных процессорах (рис. 3).
Результаты расчетов программа позволяет всесторонне исследовать с помощью графической информации (эпюр и карт), таблиц и анимации. Широкий спектр настроек фильтрации дает возможность анализировать только интересующую пользователя информацию, а многооконный режим отображения демонстрирует различные данные и проекции модели. Далее результаты расчетов можно использовать в модулях проектирования программы с применением национальных норм.
В модуле стального проектирования можно оптимизировать и подбирать реальные сечения элементов металлоконструкций на основе внутренних усилий, а также рассчитать узлы сопряжения элементов.
Модуль железобетонного проектирования позволяет определить теоретическую площадь армирования железобетонных элементов (балок, колонн, плит, фундаментов), а также выполнить в них раскладку фактической арматуры. Результаты армирования могут быть выведены на печать в качестве предварительного чертежа (рис. 4).

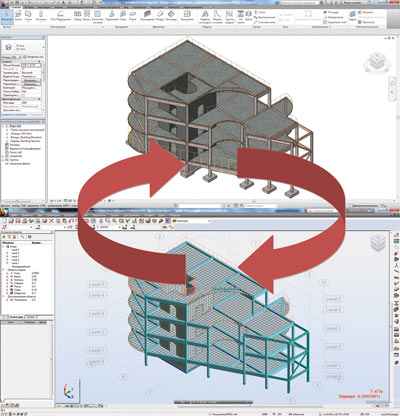
Существенным преимуществом продукта является и прямая двусторонняя связь с программой Autodesk Revit Structure. Передача аналитической модели из Autodesk Robot Structural Analysis в Autodesk Revit Structure выполняется с помощью специальной опции. Можно отметить, что связь реализована на данный момент в максимальном объеме.
Из Autodesk Revit Structure в Autodesk Robot Structural Analysis передаются элементы конструкции, нагрузки и граничные условия, что позволяет практически сразу переходить к расчету. После завершения расчета конструкцию с внесенными изменениями в Autodesk Robot Structural Analysis можно обновить в Autodesk Revit Structure. Это двустороннее взаимодействие заметно улучшается с каждой новой версией обоих программных продуктов, представляя собой очень удобную связку между конструированием и расчетами (рис. 5).
Важно отметить также, что стандартные возможности продукта можно расширить с помощью Microsoft COMсреды, которая открывает архитектуру Autodesk Robot Structural Analysis и позволяет программировать любому инженеру. Расширить функциональность Autodesk Robot Structural Analysis можно, создавая пользовательские макросы в MS Word, MS Excel, AutoCAD и других платформах (например, моделирование, расчеты и проектирование параметрических конструкций).
Результирующая пояснительная записка формируется по заданным настройкам с возможностью добавления и редактирования интересующей информации, расположения необходимых графических материалов непосредственно в генераторе отчетов программы.
Используя связь с продуктом AutoCAD Structural Detailing на основе полученной финальной расчетной модели, можно получить рабочие чертежи по металлоконструкциям и железобетонным элементам.
Чтобы дополнить картину возможностей взаимосвязи с другими САПР, нужно упомянуть об обмене данными со следующими программами: STAAD Pro, SAP 2000, StruCad и Tekla. А применение универсального формата IFC позволяет получать модели практически из любых известных архитектурных систем проектирования.
Подводя итог этому краткому обзору основных возможностей Autodesk Robot Structural Analysis, отметим, что продукт представляет собой современный расчетный комплекс, имеющий все необходимые инструменты для работы над проектами любой сложности.
- autodesk robot structural analysis
- csd
- consistent software distribution
Источник: sapr.ru