
Маджонг
играй бесплатно
на Scanwordbase.ru
2048
играй бесплатно
на Scanwordbase.ru
- программа, управляющая работой отдельных частей компьютера, 7 букв, 1-я буква Д
- программа, управляющая работой отдельных частей компьютера, 7 букв, 2-я буква Р
- программа, управляющая работой отдельных частей компьютера, 7 букв, 3-я буква А
- программа, управляющая работой отдельных частей компьютера, 7 букв, 4-я буква Й
- программа, управляющая работой отдельных частей компьютера, 7 букв, 5-я буква В
- программа, управляющая работой отдельных частей компьютера, 7 букв, 6-я буква Е
- программа, управляющая работой отдельных частей компьютера, 7 букв, 7-я буква Р
Ответ на вопрос в сканворде » Программа, Управляющая Работой Отдельных Частей Компьютера» состоит из 7 букв. Ответы на все сканворды с разбором по буквам вы всегда найдете на сайте Scanwordbase.ru. База ответов пополняется каждый день. Удачи в игре!
WINDOWS. Самое простое объяснение. Номинация на Оскар?
Источник: scanwordbase.ru
Программа Управляющая Работой Периферийного Устройства Это
Режимы работы компьютерных и периферийных устройств
Связь ЭВМ и внешнего устройства или двух ЭВМ друг с другом может быть организована в трех режимах: симплексном, полудуплексном и дуплексном.

В симплексном режиме передача данных может вестись только в одном направлении: один передает, другой принимает.
Полудуплексный режим позволяет выполнять поочередный обмен данными в обоих направлениях. В каждый момент времени передача может вестись только в одном направлении: один передает, другой принимает. И пока передача не закончилась, принимающий ничего не может сообщить передающему.
Заканчивая передачу, передающая ЭВМ пересылает принимающей специальный сигнал «перехожу на прием» (или просто «прием» — как будет выглядеть этот сигнал, должны «договориться» между собой коммуникационные программы. Этот сигнал должен быть им обоим известен, т.е. сигнал окончания связи должен выглядеть одинаково у обеих ЭВМ, находящихся на связи).
Если во время передачи в принимающей ЭВМ возникла нештатная ситуация, то принимающая ЭВМ не способна сообщить об этом передающей до появления сигнала окончания передачи. Вся информация, передаваемая после появления нештатной ситуации, теряется. После устранения неполадок передачу приходится повторять. Поэтому при обмене большими объемами информации приходится все передаваемые данные делить на блоки и контролировать прохождение каждого блока. Общее время обмена информацией при этом возрастает.
Дуплексный режим позволяет вести передачу и прием одновременно в двух встречных направлениях.
В симплексном режиме может быть осуществлена связь, например, между ЭВМ и принтером, клавиатурой и ЭВМ или ЭВМ и дисплеем, а также между двумя ЭВМ, находящимися всегда в односторонней связи. Для организации симплексного режима необходимо, чтобы передатчик одной ЭВМ был связан с приемником другой ЭВМ двухпроводной линией связи.
Детальный обзор настройки визуализатора Inectra CNC и ЧПУ-контроллеров Инектра перед началом работы
Для организации полудуплексного режима можно применить либо специальное коммутационное устройство у каждой ЭВМ, переключающее линию связи с выхода передатчика на вход приемника и обратно, либо линию связи с большим количеством проводов (например, трехпроводную, в которой один провод связывает передатчик первой ЭВМ с приемником второй, другой провод связывает приемник первой ЭВМ с передатчиком второй, а третий является общим проводом и называется «информационная земля»).
Для организации дуплексного режима необходимо, чтобы аппаратные средства (в состав которых входит и канал связи) обеспечивали возможность одновременной передачи информации во встречных направлениях. Например, дуплексный режим может быть реализован при связи ЭВМ с принтером, если дополнительно к информационной связи канал обеспечивает передачу управляющего сигнала готовности принтера (сигнал DSR).
Вы сталкивались с нарушением прав со стороны работодателей?
Да Нет, никогда
Сопряжение ЭВМ с каналом связи осуществляется с помощью последовательного (RS-232) или параллельного (Centronics) интерфейсов, каждый из которых может обеспечить работу сопрягаемых устройств в любом из рассмотренных режимов — все зависит от типа используемого канала связи и технологии его использования.
Способ, с помощью которого интерфейс обеспечивает связь в заданном режиме, называется протоколом..
Частным случаем связи » точка-точка » является соединение компьютера с периферийным устройством. Поскольку механизмы взаимодействия компьютеров в сети многое позаимствовали у схемы взаимодействия компьютера с периферийными устройствами, начнем рассматривать принципы работы сети с этого «досетевого» случая.
Связь компьютера с периферийными устройствами
Частным случаем связи » точка-точка » является соединение компьютера с периферийным устройством. Поскольку механизмы взаимодействия компьютеров в сети многое позаимствовали у схемы взаимодействия компьютера с периферийными устройствами, начнем рассматривать принципы работы сети с этого «досетевого» случая.
Для обмена данными компьютер и периферийное устройство (ПУ) оснащены внешними интерфейсами или портами (рис. 3.1). В данном случае к понятию «интерфейс» относятся:

Со стороны компьютера логикой передачи сигналов на внешний интерфейс управляют:
Со стороны ПУ интерфейс чаще всего реализуется аппаратным устройством управления ПУ, хотя встречаются и программно-управляемые периферийные устройства.
Обмен данными между ПУ и компьютером, как правило, является двунаправленным. Так, например, даже принтер, который представляет собой устройство вывода информации, возвращает в компьютер данные о своем состоянии.
Таким образом, по каналу, связывающему внешние интерфейсы, передается следующая информация:
- данные, поступающие от контроллера на ПУ, например байты текста, который нужно распечатать на бумаге;
- команды управления, которые контроллер передает на устройство управления ПУ; в ответ на них оно выполняет специальные действия, например переводит головку диска на соответствующую дорожку или же выталкивает из принтера лист бумаги;
- данные, возвращаемые устройством управления ПУ в ответ на запрос от контроллера, например данные о готовности к выполнению операции.
Рассмотрим последовательность действий, которые выполняются в том случае, когда некоторому приложению требуется напечатать текст на принтере. Со стороны компьютера в выполнении этой операции принимает участие, кроме уже названных контроллера, драйвера и приложения, еще один важнейший компонент — операционная система. Поскольку все операции ввода-вывода являются привилегированными, все приложения при выполнении операций с периферийными устройствами используют ОС как арбитра. Итак, последовательность действий такова:
- Приложение обращается с запросом на выполнение операции печати к операционной системе. В запросе указываются: адрес данных в оперативной памяти, идентифицирующая информация принтера и операция, которую требуется выполнить.
- Получив запрос, операционная система анализирует его, решает, может ли он быть выполнен, и если решение положительное, то запускает соответствующий драйвер, передавая ему в качестве параметров адрес выводимых данных. Дальнейшие действия, относящиеся к операции ввода-вывода, со стороны компьютера реализуются совместно драйвером и контроллером принтера.
- Драйвер передает команды и данные контроллеру, который помещает их в свой внутренний буфер. Пусть, например, драйвер загружает значение некоторого байта в буфер контроллера ПУ.
- Контроллер перемещает данные из внутреннего буфера во внешний порт.
- Контроллер начинает последовательно передавать биты в линию связи, представляя каждый бит соответствующим электрическим сигналом. Чтобы сообщить устройству управления принтера о том, что начинается передача байта, перед передачей первого бита данных контроллер формирует стартовый сигнал специфической формы, а после передачи последнего информационного бита — стоповый сигнал. Эти сигналы синхронизируют передачу байта. Кроме информационных бит, контроллер может передавать бит контроля четности для повышения достоверности обмена.
- Устройство управления принтера, обнаружив на соответствующей линии стартовый бит, выполняет подготовительные действия и начинает принимать информационные биты, формируя из них байт в своем приемном буфере. Если передача сопровождается битом четности, то выполняется проверка корректности передачи: при правильно выполненной передаче в соответствующем регистре устройства управления принтера устанавливается признак завершения приема информации. Наконец, принятый байт обрабатывается принтером — выполняется соответствующая команда или печатается символ.
Просмотр содержимого документа «Подключение периферийных устройств к ПК. Установка драйверов на периферийные устройства»
ответы на контрольные вопросы: 1. Основные параметры и виды клавиатур: тип разъема, механизм клавиш, раскладка символов и служебных клавиш, форм-фактор, эргономичность; 2. Устройство и принцип действия механической мыши; 3. Принцип работы трэкбола, джойстика, дигитайзера; 4. Разрешение сканирования, глубина сканирования; 5. Сенсорные экраны: достоинства и недостатки; 6. Звуковые карты и их стандарты; 7. Обзор и краткая характеристика кабелей; 8. Программное обеспечение аппаратных средств ввода-вывода видеосигнала.
Юдов А.И. Администрирование локальных вычислительных сетей. Учебное пособие. -СПб/Псков, Изд. СПбГПУ, 2005 — 212 с: ил.
Что такое периферийные устройства
Юдов А.И. Администрирование локальных вычислительных сетей. Учебное пособие. -СПб/Псков, Изд. СПбГПУ, 2005 — 212 с: ил.
Учебное пособие «Администрирование локальных вычислительных сетей» по дисциплине ЭВМ и телекоммуникации» (ОПД.Ф.010) предназначено для студентов Псковского государственного политехнического института специальности 220100 «Вычислительные машины, комплексы, системы и сети очно-заочной форм обучения.
В учебном пособии изложены принципы построения информ но-вычислительных сетей, вопросы обеспечения безопасности пер< мых данных и ресурсов ИВС.
Учебное пособие может использоваться студентами родст специальностей и специализаций других форм обучения.
Большинство окружающих нас компьютеров построены по классической схеме Фон-Неймановской машины образца 1945 года. По этой схеме компьютер состоит из центрального процессора (ЦП, CPU), памяти и устройств ввода-вывода.
Процессор исполняет программы, находящиеся в памяти; память предназначена для хранения программ и данных, доступных процессору; устройства ввода-вывода(УВВ) предназначены для связи с внешним миром. Время внесло небольшие коррективы в названия этих «трех китов», и сейчас то, что попадало под название УВВ, называют периферийными устройствами. Процессор (один или несколько), память и необходимые элементы, связывающие их между собой и другими устройствами, называют центральной частью компьютера. Периферийные устройства (ПУ) — это все программно-доступные элементы компьютера, не попавшие в его центральную часть. Их можно разделить по назначению на несколько классов.
Источник: trud-prav.ru
Управление устройствами
Аннотация: Подсистема ввода-вывода. Принцип управления устройствами. Структуры данных для ввода-вывода. Пример ввода-вывода.
Подсистема ввода-вывода
В компьютерных системах кроме процессора и оперативной памяти присутствует множество разнообразных устройств ( device ) – жесткие диски, приводы оптических дисков (CD, DVD , Blu-Ray Disk ), устройства флеш-памяти, принтеры, сканеры, звуковые и видеокарты, модемы, сетевые карты и т. п.
Операционная система должна обеспечивать управление всеми этими устройствами, т. е. предоставлять способы обмена информацией между приложениями и устройствами.
Управление устройствами в Windows осуществляется подсистемой ввода вывода, включающей несколько компонентов (см. рис.4.1 в лекции 4 » Архитектура Windows «):
- диспетчер ввода-вывода (I/O manager – Input/Output manager) – основной компонент; обеспечивает интерфейс между приложениями и устройствами;
- диспетчер PnP (Plug and Play manager) – компонент, реализующий принцип Plug and Play («подключи и работай») – автоматическое распознавание и конфигурацию подключаемых к системе устройств;
- диспетчер электропитания (power manager) – обеспечивает поддержку различных режимов энергопотребления системы и устройств;
- драйверы устройств – программы, реализующие операции ввода-вывода для конкретного устройства; драйверы больше других компонентов системы «знают» о специфике своего устройства;
- HAL (Hardware Abstraction Layer) – уровень абстрагирования от аппаратных средств; скрывает от других компонентов особенности реализации конкретных процессоров, системных плат и контроллеров прерываний;
- реестр (registry) – используется как база данных для параметров устройств и драйверов.
Далее будут рассмотрены общая схема ввода-вывода, функции и структуры данных диспетчера ввода-вывода, представленные в WRK, а также пример выполнения операции чтения.
Принцип управления устройствами
Рассмотрим схематично принцип управления внешними устройствами, а затем перейдем к изучению соответствующих структур и функций WRK.
Для пользовательских приложений операционная система представляет устройства в виде файлов. Такое представление позволяет единообразно работать с разными устройствами, используя одинаковые функции, не задумываясь о деталях реализации доступа к устройствам.
Файл (file) – совокупность данных, имеющих имя и допускающих операции чтения-записи. Типичная последовательность работы с файлом: открытие файла , выполнение команд чтения-записи, закрытие файла .
При открытии файла создается файловый объект типа FILE_OBJECT , который связан с объектом, представляющим конкретное устройство ( DEVICE_OBJECT ). В объекте-устройстве содержится информация о драйвере, который управляет этим устройством. Драйвер в системе описывается объектом типа DRIVER_OBJECT . Объекты DRIVER_OBJECT создаются при загрузке в систему нового драйвера. Затем объект DRIVER_OBJECT может создать несколько объектов DEVICE_OBJECT – по количеству управляемых драйвером устройств (рис.15.1).
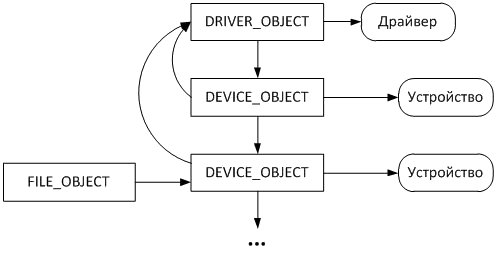
Рис. 15.1. Объекты для управления вводом-выводом
Как видно из рис.15.1, в объекте DRIVER_OBJECT содержится указатель на список объектов-устройств, а в каждом из этих объектов хранится ссылка на управляющий драйвер . Таким образом, имея информацию об объекте DRIVER_OBJECT , можно найти все устройства, которыми он управляет и, наоборот, по объекту DEVICE_OBJECT легко определяется драйвер устройства.
Приложение , которому необходимо произвести некоторую операцию с устройством (файлом), вызывает соответствующую WinAPI функцию (CreateFile, ReadFile, WriteFile и др.), которая, в свою очередь , обращается к функции диспетчера ввода-вывода.
Операция, которая запрашивается приложением, представляется в системе объектом типа IRP ( I/O Request Packet – пакет запроса на ввод/вывод ). В этом объекте хранится информация о типе операции ввода/вывода (создание, чтение, запись и т. п.), а также необходимые параметры для данной операции . Пакет IRP передается диспетчером ввода-вывода в очередь IRP потока, который запросил операцию ввода-вывода, после чего вызывается соответствующий драйвер , непосредственно выполняющий запрошенную операцию.
Структуры данных для ввода-вывода
Драйвер в системе описывается объектом типа DRIVER_OBJECT ( файл basentosincio.h, строка 1603), имеющим следующие основные поля:
- Type – поле, определяющее тип структуры подсистемы ввода-вывода. Значения этого поля могут быть следующими – IO_TYPE_DRIVER, IO_TYPE_FILE, IO_TYPE_DEVICE, IO_TYPE_IRP и др. (см. файл basentosincio.h, строка 25);
- Size – размер объекта в байтах;
- DeviceObject – ссылка на первый объект DEVICE_OBJECT в списке устройств, управляемых данным драйвером (см. рис.15.1). Следующие устройства в списке можно определять по полю NextDevice объекта DEVICE_OBJECT ;
- Flags – флаги, определяющие тип драйвера (см. файл basentosincio.h, строка 1530);
- DriverName – имя драйвера в системе;
- HardwareDatabase – путь в реестре к информации о драйвере;
- DriverStart , DriverSize , DriverSection – информация о расположении драйвера в памяти;
- DriverInit – адрес процедуры DriverEntry (точка входа в драйвер), отвечающей за инициализацию драйвера;
- DriverUnload – адрес процедуры выгрузки драйвера;
- MajorFunction – массив адресов процедур, каждая из которых отвечает за определенную операцию с устройством. Максимальное количество таких процедур равно константе IRP_MJ_MAXIMUM_FUNCTION+ 1 = 2 8 (файл basentosincio.h, строка 80), которая определяет также количество кодов IRP (см. далее).
Устройства представлены объектами типа DEVICE_OBJECT , который включает следующие главные поля ( файл basentosincio.h, строка 1397):
- Type , Size – совпадают по назначению с полями типа DRIVER_OBJECT ;
- ReferenceCount – счетчик количества открытых дескрипторов для устройства. Позволяет отслеживать, используется кем-либо устройство или нет;
- DriverObject – ссылка на драйвер, который управляет устройством;
- NextDevice – указатель на следующее устройство в списке устройств для данного драйвера;
- Flags , Characteristics – поля, уточняющие характеристики устройства;
- DeviceType – тип устройства; возможные типы перечислены в файле publicsdkincdevioctl.h (строка 26);
- SecurityDescriptor – дескриптор безопасности, сопоставленный с устройством (см. лекцию 9 «Безопасность в Windows»).
Пакеты запроса на ввод- вывод описываются типом IRP ( I/O Request Packet ), состоящим из двух частей – заголовка фиксированной длины (тело IRP ) и одного или нескольких блоков стека. В заголовке описывается информация , общая для запроса. Каждый блок стека содержит данные об одной операции ввода-вывода.
- Type , Size – поля, по назначению аналогичные соответствующим полям типов DRIVER_OBJECT и DEVICE_OBJECT ;
- IoStatus – статус операции при завершении;
- RequestorMode – режим, в котором работает поток, инициировавший операцию ввода-вывода, – пользовательский или режим ядра;
- StackCount – количество блоков стека;
- Tail.Overlay.Thread – указатель на структуру ETHREAD потока, запросившего операцию ввода-вывода;
- Tail.Overlay.CurrentStackLocation – указатель на блок стека (IRP Stack Location), который описывается структурой IO_STACK_LOCATION .
Структура блока стека IO_STACK_LOCATION описана в файле basentosincio.h, строка 2303) и имеет следующие главные поля:
- MajorFunction – номер основной функции, определяющий запрошенную операцию ввода-вывода и совпадающий с номером функции драйвера в массиве MajorFunction (структура DRIVER_OBJECT, см. выше), которую нужно вызвать для выполнения запрошенной операции. Как уже отмечалось, всего кодов 28 (IRP_MJ_MAXIMUM_FUNCTION + 1) , они описаны в файле basentosincio.h (строки 51–79);
- DeviceObject – указатель на структуру DEVICE_OBJECT , определяющую устройство для данной операции ввода-вывода;
- FileObject – указатель на структуру FILE_OBJECT (файл basentosincio.h, строка 1763), которая ассоциирована со структурой DEVICE_OBJECT .
В следующем параграфе разобран пример операции чтения с использованием рассмотренных выше структур данных.
Пример ввода-вывода
Для ввода-вывода используются следующие основные функции:
- создание/открытие файла – IoCreateFile (файл basentosioiomgriosubs.c, строка 4795);
- чтение из файла – NtReadFile (файл basentosioiomgrread.c, строка 90);
- запись в файл – NtWriteFile (файл basentosioiomgrwrite.c, строка 87);
- закрытие файла – IopDeleteFile файл basentosioiomgrobjsup.c, строка 465).
Рассмотрим пример чтения с устройства, используя изученные структуры данных и функцию NtReadFile (рис.15.2).
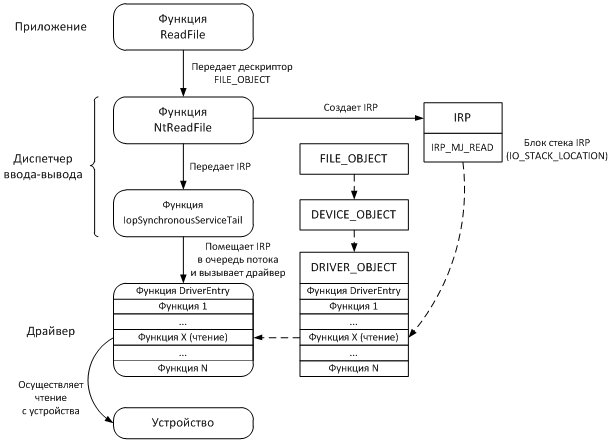
Рис. 15.2. Последовательность операций и структуры данных при чтении с устройства
Предположим, некоторому приложению требуется прочитать данные с устройства, например, из файла на жестком диске. Предварительно приложение должно получить дескриптор объекта FILE_OBJECT , например, при помощи WinAPI функции CreateFile .
Для чтения из файла приложение вызывает WinAPI-функцию ReadFile , которая обращается к функции диспетчера ввода-вывода NtReadFile и передает ей дескриптор объекта FILE_OBJECT .
Функция NtReadFile определена в файле basentosioiomgrread.c (строка 90) и выполняет две основные задачи – создает объект IRP (строка 517) и вызывает функцию IopSynchronousServiceTail (строка 725). При создании объекта IRP в блок стека заносится номер основной функции (Major Function ), в случае операции чтения этот код равен константе IRP_MJ_READ (строка 558) и указывает на функцию чтения в массиве MajorFunction структуры DRIVER_OBJECT .
Функция IopSynchronousServiceTail определена в файле basentosioiomgrinternal.c (строка 7458). Эта функция помещает переданный ей объект IRP в очередь потока ( функция IopQueueThreadIrp , строка 7468). Указатель на очередь IRP потока хранится в поле IrpList структуры ETHREAD ( файл basentosincps.h, строка 623). Кроме этого, функция IopQueueThreadIrp вызывает соответствующий драйвер ( функция IoCallDriver, строка 7494).
Драйвер выполняет определенную кодом IRP функцию и возвращает статус операции .
Резюме
В лекции представлены компоненты подсистемы ввода вывода в Windows , рассмотрен принцип управления устройствами, а также реализация этого принципа на основе структур данных и функций Windows Research Kernel . Разобран пример ввода вывода для операции чтения из файла.
В следующей лекции подробно рассматривается структура основной файловой системы Windows – NTFS .
Контрольные вопросы
- Перечислите компоненты подсистемы ввода вывода в Windows.
- Дайте определение понятия «файл».
- Опишите основные структуры данных, участвующие в процессе ввода вывода.
- Расскажите о взаимодействии объектов FILE_OBJECT , DEVICE_OBJECT , DRIVER_OBJECT , IRP в процессе ввода вывода.
- Какую роль играет массив MajorFunction в структуре DRIVER_OBJECT ?
- Приведите пример ввода вывода с описанием участвующих в нем структур данных и функций Windows Research Kernel.
Источник: intuit.ru