

Современную промышленность невозможно представить без систем автоматизации. Сложность производственных процессов делает невозможным управление ими вручную, к тому же системы автоматики обходятся гораздо дешевле, чем обслуживающий персонал, да и работают они быстрее и надёжнее. Да что говорить о промышленности – в настоящее время практически ни одно здание не обходится без автоматики. Школы, больницы, детские сады, офисные и складские помещения, загородные дома и коттеджи – все эти объекты оснащены инженерными системами с автоматическим управлением. Несмотря на многообразие применений и сфер использования все системы автоматики работают по одному принципу и обладают схожей структурой, в центре которой находится «мозг» системы – программируемый логический контроллер (ПЛК).
С чего всё начиналось?

Контроллер hunter X CORE. Автополив. Инструкция, как настроить программу полива.
Все начиналось с построения релейно-контактных систем управления, представляющих из себя огромные шкафы, набитые проводами и релейными модулями. В эти шкафы приходили сигналы от датчиков, а на выходе формировались команды исполнительным устройствам.
Кроме того, что они были больших размеров, такие системы управления неудобны тем, что они совершенно не гибкие: для того, изменить логику управления, необходимо вручную перебирать всю электрическую схему. С развитием микропроцессорной техники на смену релейным шкафам пришли ПЛК – устройства, выполняющие те же функции, но имеющие принципиально другой механизм преобразования входных сигналов в выходные. Такое преобразование в ПЛК выполняется в соответствии с записанной программой. С появлением контроллеров размеры систем управления уменьшились в десятки раз, значительно упростился процесс их разработки и последующих изменений.
Принцип работы ПЛК

ПЛК работает по циклическому принципу. В самом начале цикла ПЛК сканирует состояния входов, на которые поступают сигналы от датчиков и устройств. Затем в соответствии с алгоритмом программы происходит вычисление состояния выходов. В конце рабочего цикла контроллер устанавливает каждый выход в состояние, которое было определено.
1. Чтение состояний входов
2. Выполнение программы пользователя
3. Запись состояний выходов
Указанные этапы цикла выполняются последовательно – это означает, что изменения состояний входов не будут «замечены» контроллером во время выполнения программы. По этой причине одним из важнейших параметров ПЛК является время реакции. Если оно окажется больше, чем минимальный период изменения состояний входов, некоторые события, происходящие в системе, будут «пропущены» контроллером.
Быстрая настройка с нуля. Сетап для мобильной стойки за 20 минут. 4-PAR 2-Spot. Sunlite suite 2.
Также стоит учесть, что и датчики реагируют на изменения в системе не мгновенно. Поэтому полное время реакции системы управления складывается из времени реакции ПЛК и времени реакции датчиков.

Время реакции системы — время с момента изменения состояния системы до момента выработки соответствующей реакции (принятия решения).
Системы реального времени
Все системы можно условно разделить на системы жёсткого и мягкого реального времени.

В системах жёсткого реального времени реакция ПЛК не должна превышать определённый временной порог. При увеличении времени реакции система теряет свою работоспособность.
В системах мягкого реального времени при увеличении времени реакции может происходить сильное ухудшение качества управления, но работоспособность при этом не теряется.
Входы и выходы ПЛК

Дискретные входы – предназначены для ввода сигналов от дискретных датчиков (кнопки, тумблеры, концевые выключатели, термостаты и др.). Напряжение сигнала унифицировано для всех ПЛК и составляет 24 В. Проще говоря, при «появлении» на входе контроллера напряжение 24 В – ПЛК будет считать этот вход «включенным», то есть он примет значение логической «1» в восприятии контроллера.
Дискретные выходы – предназначены для управления устройствами по принципу «включить/выключить» (магнитные пускатели, лампочки, клапаны и др.). Дискретный выход – это обычный контакт, который может замкнуть или разомкнуть управляющую или питающую цепь устройства.

Аналоговые входы – предназначены для ввода непрерывного сигнала с датчиков и других устройств. Существует два основных вида унифицированных аналоговых сигналов: по току – 4..20 мА, по напряжению 0..10 В. Например, датчик температуры имеет диапазон -10 — +70 °С, тогда 4мА на выходе соответствует -10 °С, а 20мА – это +70 °С. С аналоговыми сигналом по напряжению всё аналогично.
Аналоговые выходы – предназначены для плавного управления устройствами. Унифицированные значения аналогового сигнала на выходах такое же, как и на входах – 4..20мА (0..10В). Например, вентиль может поворачиваться в пределах от 0° до 90°. Ток 4мА повернёт его в положение 0°, а 20мА – в положение 90°. Для того, чтобы повернуть его на 45°, нужно подать на него управляющий сигнал 8мА.
Таким образом, меняя значение силы тока на выходе, контроллер может поворачивать вентиль на заданный угол.

Специализированные входы/выходы – не унифицированы, применяются для подключения нестандартных датчиков и исполнительных устройств со специфическим уровнем сигнала, питанием и программной обработкой.
Цифровые интерфейсы ПЛК
Изначально ПЛК предназначались для управления последовательными логическими процессами. Современные контроллеры помимо логических операций способны выполнять цифровую обработку сигналов. Они могут обмениваться информацией с другими устройствами, такими как панели оператора, GSM-модули, частотные преобразователи, серверы сбора данных и др.

ПЛК могут иметь распределённую структуру, когда модули входов и выходов находятся на значительном удалении от самого контроллера, вблизи объекта управления. Несколько ПЛК, управляющие разными частями одной системы, могут объединяться в сеть для обмена информаций и согласования управляющих действий, а так же передачи всей информации о системе в центральный диспетчерский пункт.

В этих случаях обмен удалённых модулей и устройствами с ПЛК осуществляется по цифровым интерфейсам с использованием специализированных протоколов, таких как Modbus RTU, ModBus TCP, CANopen, Profibus, EtherNet IP и других.
Источник: lazysmart.ru
Программируемые логические контроллеры
С чего начиналась промышленная автоматика? А начиналось все с контактно-релейных схем управления промышленными процессами.
Кроме жуткого «шелестения», контактно релейные схемы имели фиксированную логику работы, и в случае изменения алгоритма, необходимо основательно переделать монтажную схему Бурное развитие микропроцессорной техники, привели к созданию систем управления технологическими процессами на базе промышленных контроллеров. Но это не означает, что реле изжили себя, у них просто своя ниша для применения.
ПЛК – программируемый логический контроллер, представляют собой микропроцессорное устройство, предназначенное для сбора, преобразования, обработки, хранения информации и выработки команд управления, имеющий конечное количество входов и выходов, подключенных к ним датчиков, ключей, исполнительных механизмов к объекту управления, и предназначенный для работы в режимах реального времени. 
Программное обеспечение универсальных контроллеров состоит из двух частей. Первая часть это системное программное обеспечение. Проводя аналогию с компьютером можно сказать, что это операционная система, т.е. управляет работой узлов контроллера, взаимосвязи составляющих частей, внутренней диагностикой.
Системное программное обеспечение ПЛК расположено в постоянной памяти центрального процессора и всегда готово к работе. По включению питания, ПЛК готов взять на себя управление системой уже через несколько миллисекунд. ПЛК работают циклически по методу периодического опроса входных данных.
Рабочий цикл ПЛК включает 4 фазы:
1. Опрос входов
2. Выполнение пользовательской программы
3. Установку значений выходов
4. Некоторые вспомогательные операции (диагностика, подготовка данных для отладчика, визуализации и т. д.). Выполнение 1 фазы обеспечивается системным программным обеспечением.
После чего управление передается прикладной программе, той программе, которую вы сами записали в память, по этой программе контроллер делает то что вы пожелаете, а по ее завершению управление опять передается системному уровню. За счет этого обеспечивается максимальная простота построения прикладной программы – ее создатель не должен знать, как производится управление аппаратными ресурсами.
Необходимо знать с какого входа приходит сигнал и как на него реагировать на выходах Очевидно, что время реакции на событие будет зависеть от времени выполнения одного цикла прикладной программы. Определение времени реакции – времени от момента события до момента выдачи соответствующего управляющего сигнала – поясняется на рисунке: 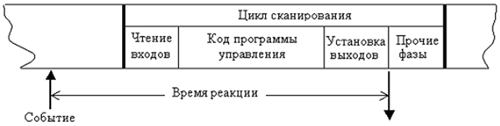
Один дискретный вход ПЛК способен принимать один бинарный электрический сигнал, описываемый двумя состояниями – включен или выключен. Все дискретные входы (общего исполнения) контроллеров обычно рассчитаны на прием стандартных сигналов с уровнем 24 В постоянного тока. Типовое значение тока одного дискретного входа (при входном напряжении 24 В) составляет около 10 мА.
Аналоговый электрический сигнал отражает уровень напряжения или тока, соответствующий некоторой физической величине, в каждый момент времени. Это может быть температура, давление, вес, положение, скорость, частота и т. д. Поскольку ПЛК является цифровой вычислительной машиной, аналоговые входные сигналы обязательно подвергаются аналого-цифровому преобразованию (АЦП).
В результате, образуется дискретная переменная определенной разрядности. Как правило, в ПЛК применяются 8 — 12 разрядные преобразователи, что в большинстве случаев, исходя из современных требований по точности управления технологическими процессами, является достаточным.
Кроме этого АЦП более высокой разрядности не оправдывают себя, в первую очередь из-за высокого уровня индустриальных помех, характерных для условий работы контроллеров. Практически все модули аналогового ввода являются многоканальными. Входной коммутатор подключает вход АЦП к необходимому входу модуля.
Стандартные дискретные и аналоговые входы ПЛК способны удовлетворить большинство потребностей систем промышленной автоматики. Необходимость применения специализированных входов возникает в случаях, когда непосредственная обработка некоторого сигнала программно затруднена, например, требует много времени.
Наиболее часто ПЛК оснащаются специализированными счетными входами для измерения длительности, фиксации фронтов и подсчета импульсов. Например, при измерении положения и скорости вращения вала очень распространены устройства, формирующие определенное количество импульсов за один оборот – поворотные шифраторы. Частота следования импульсов может достигать нескольких мегагерц. Даже если процессор ПЛК обладает достаточным быстродействием, непосредственный подсчет импульсов в пользовательской программе будет весьма расточительным по времени. Здесь желательно иметь специализированный аппаратный входной блок, способный провести первичную обработку и сформировать, необходимые для прикладной задачи величины.
Вторым распространенным типом специализированных входов являются входы способные очень быстро запускать заданные пользовательские задачи с прерыванием выполнения основной программы – входы прерываний. Дискретный выход также имеет два состояния – включен и выключен. Они нужны для управления: электромагнитных клапанов, катушек, пускателей, световые сигнализаторы и т.д. В общем сфера их применения огромна, и охватывает почти всю промышленную автоматику. Конструктивно ПЛК подразделяются на моноблочные, модульные и распределенные. Моноблочные имеют фиксированный набор входов выходов  В модульных контроллерах модули входов – выходов устанавливаются в разном составе и количестве в зависимости от предстоящей задачи
В модульных контроллерах модули входов – выходов устанавливаются в разном составе и количестве в зависимости от предстоящей задачи  В распределенных системах модули или даже отдельные входа-выхода, образующие единую систему управления, могут быть разнесены на значительные расстояния
В распределенных системах модули или даже отдельные входа-выхода, образующие единую систему управления, могут быть разнесены на значительные расстояния
Языки программирования ПЛК
- Sequential Function Chart (SFC) – язык последовательных функциональных блоков;
- Function Block Diagram (FBD) – язык функциональных блоковых диаграмм;
- Ladder Diagrams (LАD) – язык релейных диаграмм;
- Statement List (STL) – язык структурированного текста, язык высокого уровня. Напоминает собой Паскаль
- Instruction List (IL) – язык инструкций., это типичный ассемблер с аккумулятором и переходам по метке.
Язык LAD или KOP (с немецкого Kontaktplan) похожи на электрические схемы релейной логики. Поэтому инженерам не знающим мудреных языков программирования, не составит труда написать программу. Язык FBD напоминает создание схем на логических элементах. В каждом из этих языков есть свои минусы и плюсы. Поэтому при выборе специалисты основываются в основном на личном опыте.
Хотя большинство программных комплексов дают возможность переконвертировать уже написанную программу из одного языку в другой. Так как некоторые задачи изящно и просто решаются на одном языке, а на другом придется столкнуться с некоторыми трудностями
Наибольшее распространение в настоящее время получили языки LAD, STL и FBD.
Большинство фирм изготовители ПЛК традиционно имеют собственные фирменные наработки в области инструментального программного обеспечения. Например такие как «Concept» Schneider Electric, «Step 7» Siemens.
Программный комплекс CoDeSys
Открытость МЭК стандартов привели к созданию фирм занимающихся исключительно инструментами программирования ПЛК.
Наибольшей популярностью в мире пользуются комплекс CoDeSys. CoDeSys разработан фирмой 3S. Это универсальный инструмент программирования контроллеров на языках МЭК, не привязанной к какой-либо аппаратной платформе и удовлетворяющим всем современным требованиям.
Основные особенности:
— полноценная реализация МЭК языков
— встроенный эмулятор контроллера позволяет проводить отладку проекта без аппаратных средств. Причем эмулируется не некий абстрактный контроллер, а конкретный ПЛК с учетом аппаратной платформы
— встроенные элементы визуализации дают возможность создать модель объекта управления и проводить отладку, т.е. дает возможность создавать человеко-машинного интерфейса (HMI)
— очень широкий набор сервисных функции, ускоряющий работу программиста
— существует русская версия программы, и русская документация
Литература:
Современные технологии промышленной автоматизации: учебник / О. В. Шишов. Саранск : Изд-во Мордов. ун-та, 2007. – 273 с. ISBN 5-7103-1123-5
Теги:
 sulika
sulika  Опубликована: 2012 г.
Опубликована: 2012 г.  0
0 
![]()
 Вознаградить Я собрал 0 0
Вознаградить Я собрал 0 0
Оценить статью
- Техническая грамотность
Источник: cxem.net
ПЛК контроллер это

Программируемые логические контроллеры (ПЛК) – это специальные управляющие устройства, которые помогают автоматизировать технологические процессы.
13 июля 2022
Программируемые логические контроллеры (ПЛК) – это специальные управляющие устройства, которые помогают автоматизировать технологические процессы. Их активно применяют на производствах системах реального времени: сборочные конвейеры, прессовое оборудование, токарные станки, сварочные установки и многое другое. ПЛК представляют собой самостоятельные устройства (в отличие от тех же микросхем), которые работают отдельно от управляемого оборудования. Благодаря развитой системе датчиков и простому принципу работы справиться с их настройкой и дальнейшим использованием может начинающий пользователь.
Устройство ПЛК
Для того, чтобы было проще разобраться с устройством и компонентами контроллера, можно разделить его на 3 основные секции – входная, выходная и центральная. Они есть в любой модификации PLC: как в цельных аппаратах, где все секции объединены в одном блоке, так и в распределённых решениях. Последние – отдельный корпус для процессорного блока и отдельно подключенные (через интерфейсы или шины) модули для ввода/вывода. Удобно для крупных производств, так как позволяет создать единую сеть с одним ПЛК, но с расположенными по всей территории датчиками.
Входная секция
- дискретные – один вход (это 1 бит) может принять только один бинарный сигнал. Если же для описания состояния оборудования одного бита недостаточно, используются несколько дискретных входов. Биты, полученные из дискретных входов, легко читаются и изменяются из оперативной памяти устройства;
- аналоговые – эти входы помогают ввести в ПЛК вольтовые/токовые сигналы, а также термопары (передаются при помощи уровня сопротивления). Благодаря этому устройство получает информацию о значениях температуры, давления, веса, скорости перемещения, частоте оборотов. После попадания в ПЛК аналоговый сигнал всегда преобразуется в дискретное мультибитовое двоичное число;
- специальные – используются, когда появляются трудности в обработке сигналов. С их помощью подсчитываются импульсы, фиксируются фронты, измеряется длительность. Некоторые входы оснащены ещё одной полезной функцией: мгновенный запуск команды пользователя с прерываниями на выполнение основного ПО.
Центральная секция
В эту секцию входит центральный процессор, память и система коммуникаций.
В качестве центрального процессора выступают микропроцессоры – они могут быть как простыми и бюджетными, так и мощными, включая двухъядерные и четырехъядерные. В зависимости от задач клиента подбираются все соответствующие характеристики:
- разрядность – восьмиразрядные микропроцессоры подходят для малопроизводительных ПЛК – можно построить межсетевые шлюзы, управлять небольшими технологическими аппаратами, станками. 16- и 32-разрядные МП решают более сложные задачи в высокопроизводительных контроллерах;
- архитектура. Самый популярный вариант – RISC-архитектура – предполагает множество регистров и небольшое количество команд одинаковой длины. Благодаря такому сокращённому набору возможно построение эффективных компиляторов и конвейера процесса;
- тактовая частота – основная характеристика производительности микропроцессоров. Частота в МП с одинаковой архитектурой пропорциональна производительности.
Для больших ПЛК возможно наличие сразу нескольких центральных процессоров. Один из них становится «ведущим», а все остальные – «ведомыми».
От ёмкости памяти зависит количество переменных, которые может обработать ПЛК. Память контроллера можно также поделить на несколько видов. ПЗУ используются для хранения редко изменяемой информации, а ОЗУ, наоборот, для постоянно меняющихся значений (результаты промежуточных вычислений или данные диагностики). Не менее важны регистры – самые быстродействующие элементы памяти, которые исполняют элементарные команды процессора.
Центральная секция выполняет сразу несколько задач:
- обрабатывает полученную информацию из модулей ввода и передаёт полученные результаты в модули вывода;
- обменивается данными с промышленной сетью, а также с устройствами для программирования контроллера;
- управляет обменом с памятью.
Выходная секция
С этой секции контроллер управляет подключенными системами. Здесь исполняются все отправленные ПЛК команды, реализуются функции автоматической калибровки/диагностики, преобразуются форматы выводимых данных. Также, как и во входной секции, выходы разделяются на 3 группы.
В качестве нагрузки дискретных выходов выстуают силовые пускатели, лампы, соленоиды, индикаторы, пневматические клапаны, реле (самый простой вариант).
Главная задача аналоговых выходов – преобразовать цифровые значения в непрерывный сигнал. Для этого используются 8- или 12-разрядные преобразователи. Их производительности хватает для того, чтобы исправно работать на производстве.
Специальные выходы могут формировать частотно-импульсные или широтно-импульсные сигналы. С их помощью также можно управлять специфическим оборудованием.
Принцип работы ПЛК
Работа ПЛК – это циклический процесс, который состоит из 4 этапов. После того, как устройство включают, оно сразу готово к работе. Изначально системное программное обеспечение проводит «опрос входов», получая всю необходимую информацию. Далее начинает работать авторская программа владельца: контроллер будет выполнять всё, что указал пользователь. После того, как все команды будут выполнены, за работу вновь берётся система.
Подобный принцип работы значительно упрощает деятельность пользователя: для программирования ему достаточно знать, откуда приходит сигнал, и как на него реагировать на выходе.
Основные виды ПЛК
После информации о том, что такое ПЛК, важно понять их различия между собой и соответствие определённым задачам. Так, уже упоминалось, что конструкция может быть как моноблочной, так и распределённой.
Аппараты также могут иметь разное количество входов/выходов: от нано- (до 16 каналов, устройство имеет встроенные возможности) и малых систем (16-100 входов/выходов) до больших (300-2000 каналов) и сверхбольших моделей (более 2000). Популярным вариантом остаются средние ПЛК – в них представлено от 100 до 300 каналов.
Отдельное разделение существует по сфере использования. ПЛК создаются специально для робототехники, контроля перемещений, позиционирования. Есть универсальные общепромышленные или коммуникационные устройства, а также контроллеры ПИД.
Программирование ПЛК
В прошлом технологам и программистам было довольно трудно взаимодействовать при разработке программного обеспечения: ни один из специалистов не мог доступно объяснить другому особенности своей работы. В связи с этим появились технологические языки программирования – они доступны инженерам и технологам, так как максимально упрощены.
Международная Электротехническая Комиссия разработала стандарт МЭК-61131-3, в котором собраны все технологии в области программирования для автоматизации производственных процессов. Имеется пять языков программирования:
- Sequential Function Chart (SFC) – переводится как «последовательность функциональных блоков». С помощью этого языка можно последовательно управлять процессом на базе систем условий, передающих управления с одной операции на другую;
- Function Block Diagram (FBD) – «функциональные блоковые диаграммы». При программировании можно использовать наборы библиотечных или собственных блоков;
- Ladder Diagrams (LАD) – в основе лежат релейно-контактные системы. Элементами логики являются обмотки реле, контакты реле, горизонтальные и вертикальные перемычки;
- Statement List (STL) – сложный и продвинутый язык, который позволяет создавать более проработанные программы путём введения мнемонических обозначений команд. Схож с программированием на Ассемблере;
- Instruction List (IL) – текстовый язык программирования, с помощью которого можно добиться оптимизированного кода для реализации критических секторов программ. В основе лежат переходы по меткам и аккумулятор.
Для того, чтобы программировать контроллеры было удобно, в 90-х годах была создана система CoDeSys. Она поддерживает все языки МЭК, не привязываясь к конкретной аппаратной платформе. ПО предлагает функции: визуализация, проведение отладки, создание человеко-машинного интерфейса. Бесплатная лицензия и русифицированная версия сделали CoDeSys очень популярной среди отечественных инженеров и технологов.

Как выбрать нужный ПЛК?
Огромное количество преимуществ, модификаций и технических возможностей могут вызывать вопросы у покупателей – на какой конкретно модели следует остановиться. При выборе нужно ориентироваться на несколько параметров:
- совместимость с запросами заказчика – контроллер должен соответствовать требованиям владельца, даже если подобная вариация стоит больше, чем ожидалось. Так, масштабные производства нуждаются в распределённых системах, чтобы охватить большое пространство, в то время как небольшим компаниям подойдут моноблочные ПЛК;
- устойчивость к внешним воздействиям – резкие смены температуры, грязь, пыль, брызги технологических жидкостей, электромагнитные помехи влияют на продолжительность эксплуатации. Избежать преждевременной поломки можно установкой в защитные шкафы;
- универсальность среды программирования – она должна одинаково хорошо подходить для разных платформ. Переквалификация специалистов займёт гораздо больше времени и средств, чем покупка более дорогого агрегата.
Источник: climatplc.ru