
Исполнитель Робот передвигается по полю, разбитому на клетки, между которыми могут стоять стены (в контексте мастер-класса мы будем использовать чистое поле без стен). По периметру поля стоит забор, за пределы которого исполнитель выходить не может. Робот может передвигаться по полю, закрашивать клетки, измерять температуру и радиацию. Робот не может проходить сквозь стены, но может проверять, есть ли рядом с ним стена.

Программа, управляющая Роботом, должна начинаться со строки использовать Робот . Перед выполнением программы Робот помещается в некоторую заранее определенную обстановку. Эта обстановка называется стартовой обстановкой Робота. Обстановки Робота хранятся в файлах специального формата (расширение .fil).
При запуске систем КуМир окно Робота по умолчанию скрыто. Для того, чтобы отобразить это окно, необходимо в меню выбрать команду «Показать окно Робота».
САМОЕ ВАЖНОЕ В “Adobe Illustrator”. Урок 1 — Знакомство с программой
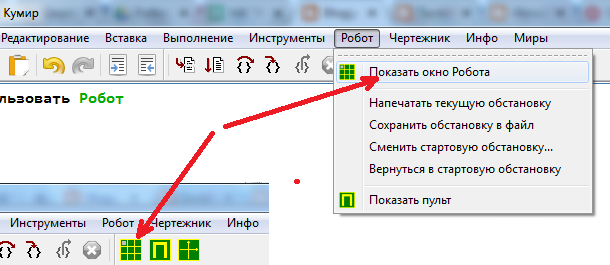
Чтобы загрузить необходимую стартовую обстановку Робота, необходимо в меню Робота выбрать пункт «Сменить стартовую обстановку» и затем указать расположение файла с необходимой обстановкой. При необходимости редактирования (создания собственной) стартовой обстановки вызываем редактор стартовых обстановок (команда «Редактировать стартовую обстановку Робота»).
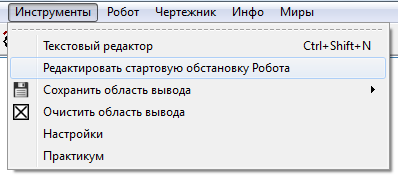
Редактирование обстановки происходит в окне наблюдения, но при этом окно наблюдения открывается в специальном режиме – режиме редактирования стартовой обстановки. Редактируемая обстановка может быть сохранена в файл или непосредственно использоваться в качестве стартовой обстановки.
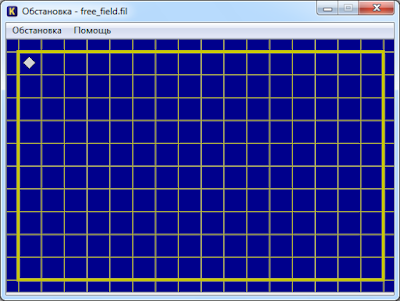
В версии 1.9 максимальный размер поля, который можно создать в редакторе — 10х16 клеток. В версии 2.0.1 предельные размеры поля 128х255 клеток. Стартовые обстановки, созданные в разных версиях совместимы. В рамках мастер-класса мы будет использовать готовые обстановки, созданные автором МК.
Материалы для дополнительного изучения:
Исполнитель «Робот». Руководство пользователя (версия 1.9) скачать >>
Исполнитель «Робот». Руководство пользователя (версия 2.0.1) скачать >>
КуМир. Робот. Знакомство
Источник: mk2018cp.blogspot.com
Презентация, доклад по информатике Исполнитель Робот в среде программирования Кумир и Pascal ABC
Содержание 1.Исполнитель Робот в среде программирования Кумир.1.1 Задание №11.2 Задание №21.3 Задание №31.4 Задание №42. Исполнитель Робот в среде программирования Pascal ABC.2.1 Задание №52.2 Задание №62.3 Задание №73. Вывод.
- Главная
- Информатика
- Презентация по информатике Исполнитель Робот в среде программирования Кумир и Pascal ABC
Слайд 1Исполнитель Робот в среде программирования Кумир и Pascal ABC
Учитель МБОУ СОШ
№20
г. Новомосковск
Панина Г. В.
Слайд 2Содержание
1.Исполнитель Робот в среде программирования Кумир.
1.1 Задание №1
1.2 Задание №2
1.3 Задание
№3
1.4 Задание №4
2. Исполнитель Робот в среде программирования Pascal ABC.
2.1 Задание №5
2.2 Задание №6
2.3 Задание №7
3. Вывод.
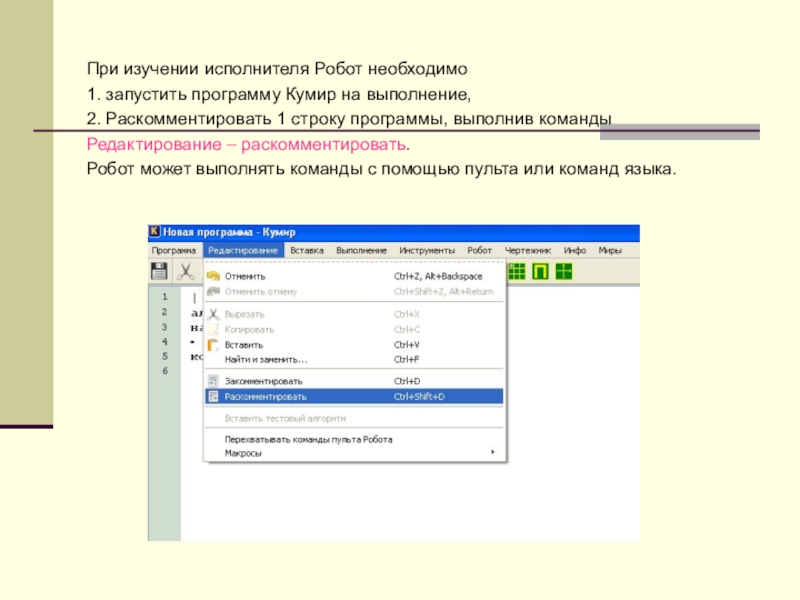
Слайд 3При изучении исполнителя Робот необходимо
1. запустить программу Кумир на выполнение,
2.
Раскомментировать 1 строку программы, выполнив команды
Редактирование – раскомментировать.
Робот может выполнять команды с помощью пульта или команд языка.
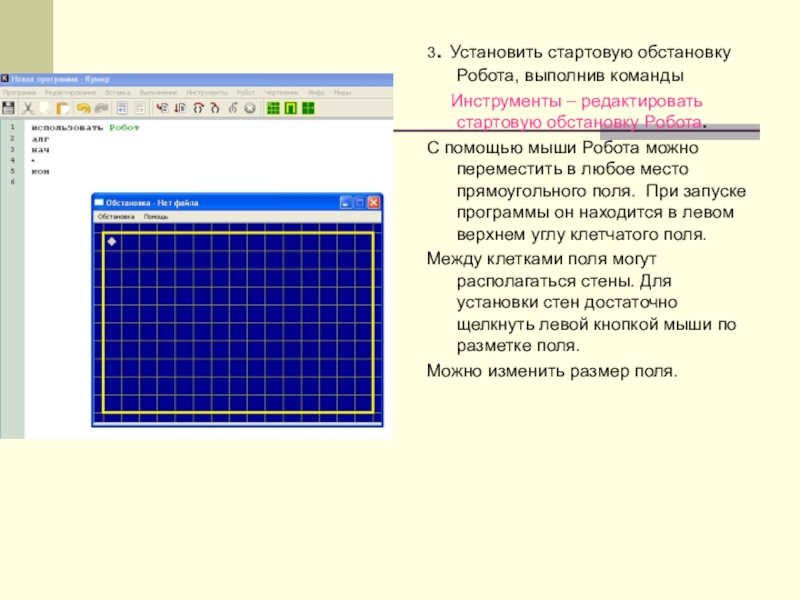
Слайд 43. Установить стартовую обстановку Робота, выполнив команды
Инструменты –
редактировать стартовую обстановку Робота.
С помощью мыши Робота можно переместить в любое место прямоугольного поля. При запуске программы он находится в левом верхнем углу клетчатого поля.
Между клетками поля могут располагаться стены. Для установки стен достаточно щелкнуть левой кнопкой мыши по разметке поля.
Можно изменить размер поля.
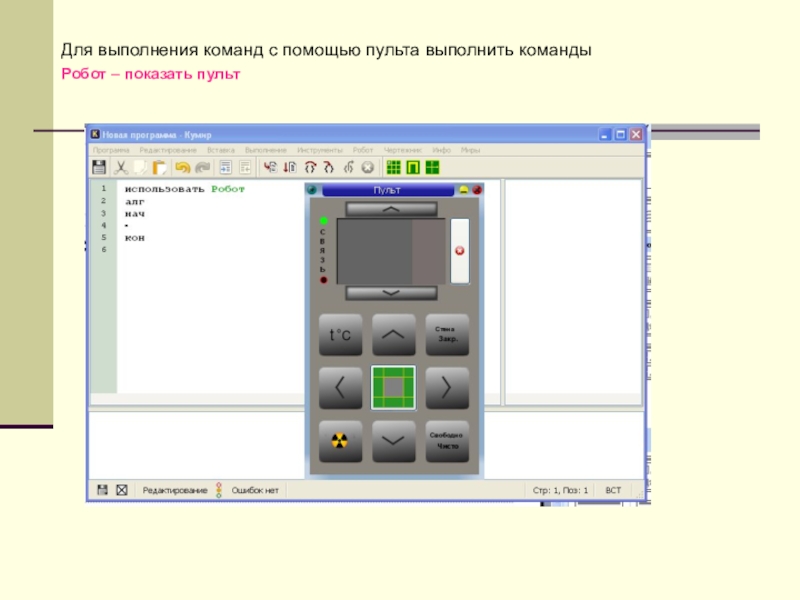
Слайд 5Для выполнения команд с помощью пульта выполнить команды
Робот – показать пульт
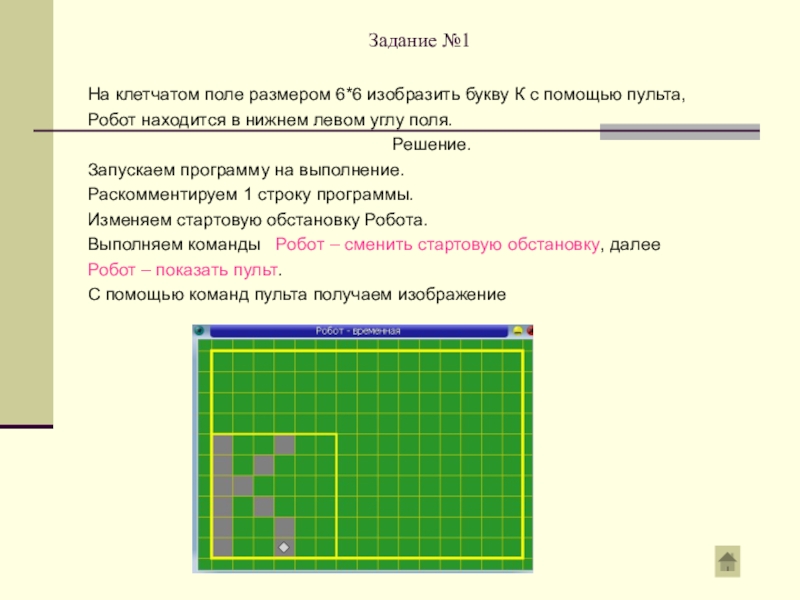
Слайд 6Задание №1
На клетчатом поле размером 6*6 изобразить букву К с помощью
пульта,
Робот находится в нижнем левом углу поля.
Решение.
Запускаем программу на выполнение.
Раскомментируем 1 строку программы.
Изменяем стартовую обстановку Робота.
Выполняем команды Робот – сменить стартовую обстановку, далее
Робот – показать пульт.
С помощью команд пульта получаем изображение
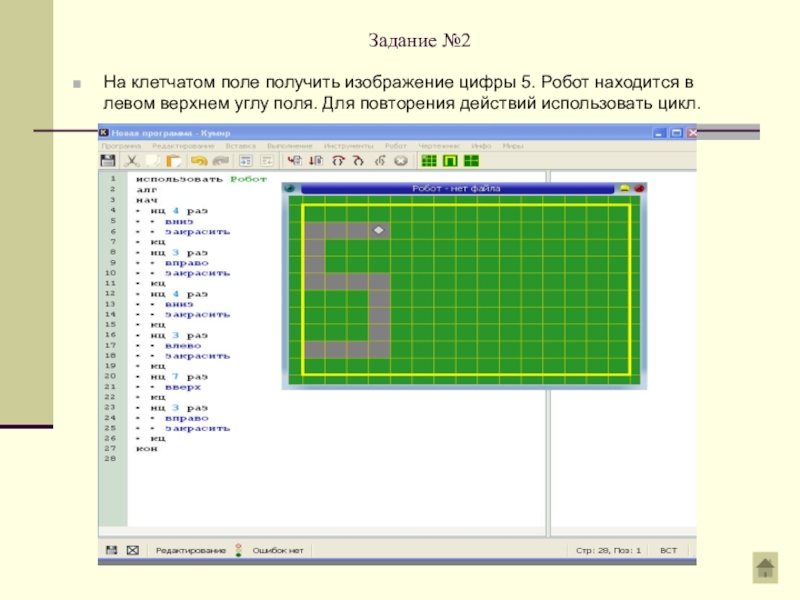
Слайд 7Задание №2
На клетчатом поле получить изображение цифры 5. Робот находится в
левом верхнем углу поля. Для повторения действий использовать цикл.
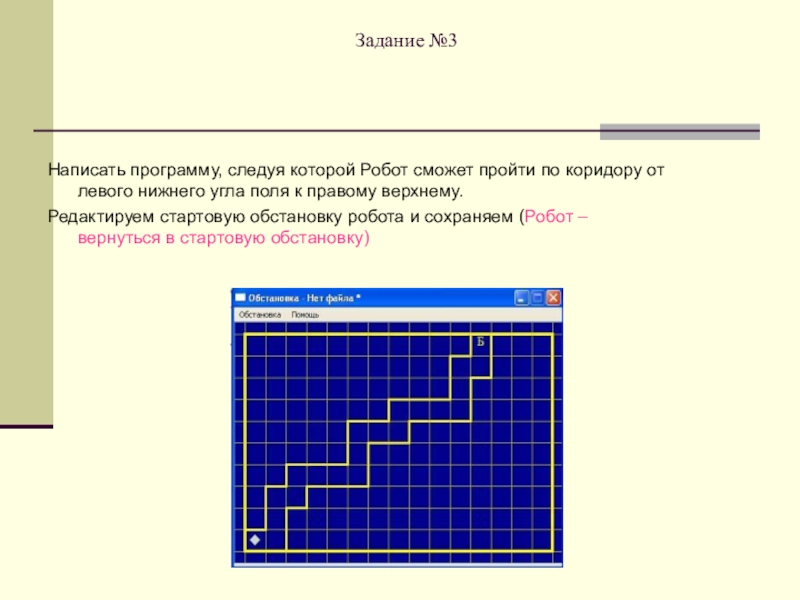
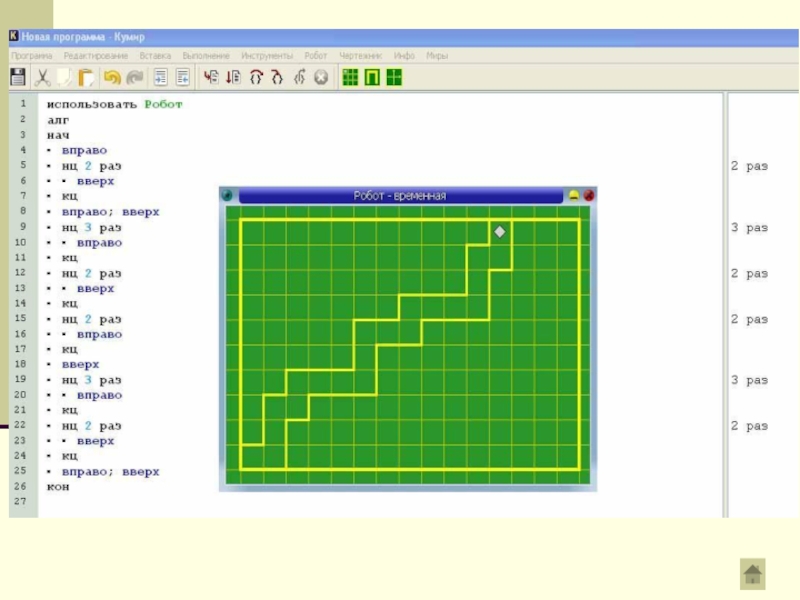
Слайд 8Задание №3
Написать программу, следуя которой Робот сможет пройти по коридору от
левого нижнего угла поля к правому верхнему.
Редактируем стартовую обстановку робота и сохраняем (Робот – вернуться в стартовую обстановку)
Слайд 9
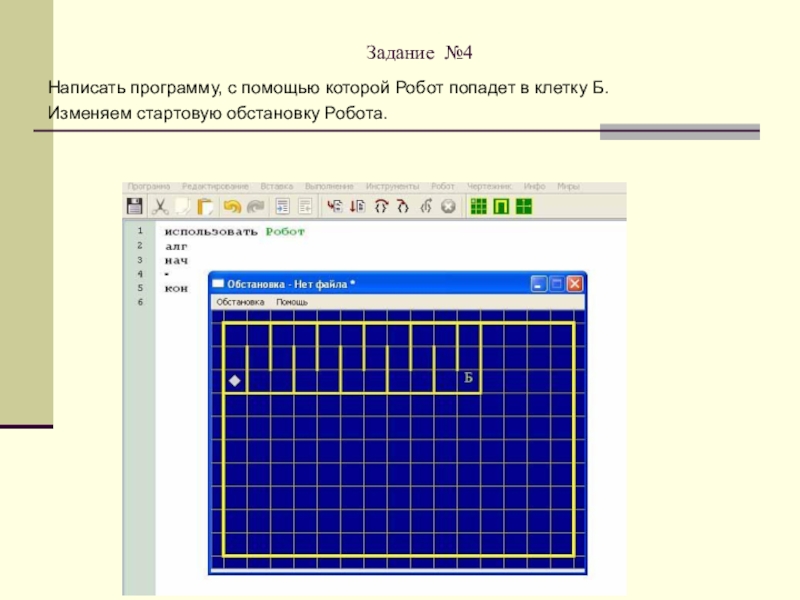
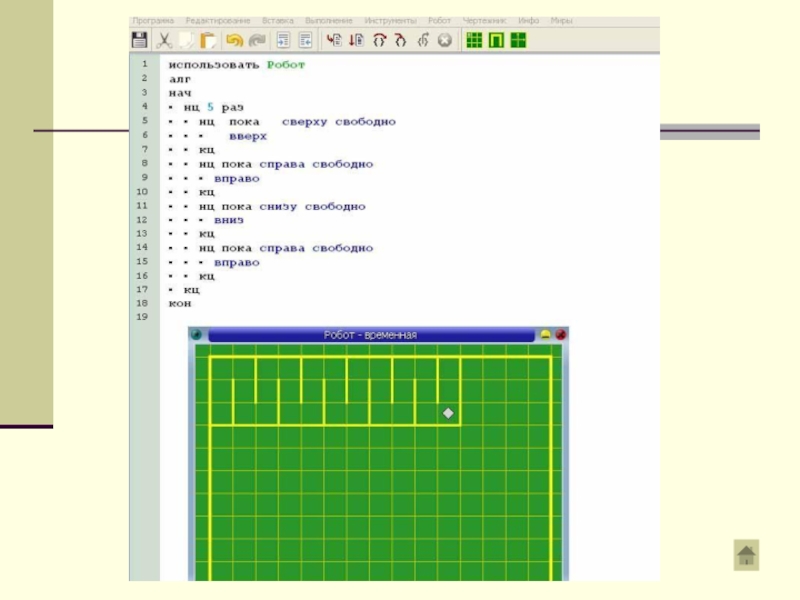
Слайд 10Задание №4
Написать программу, с помощью которой Робот попадет в клетку Б.
Изменяем
стартовую обстановку Робота.
Слайд 11
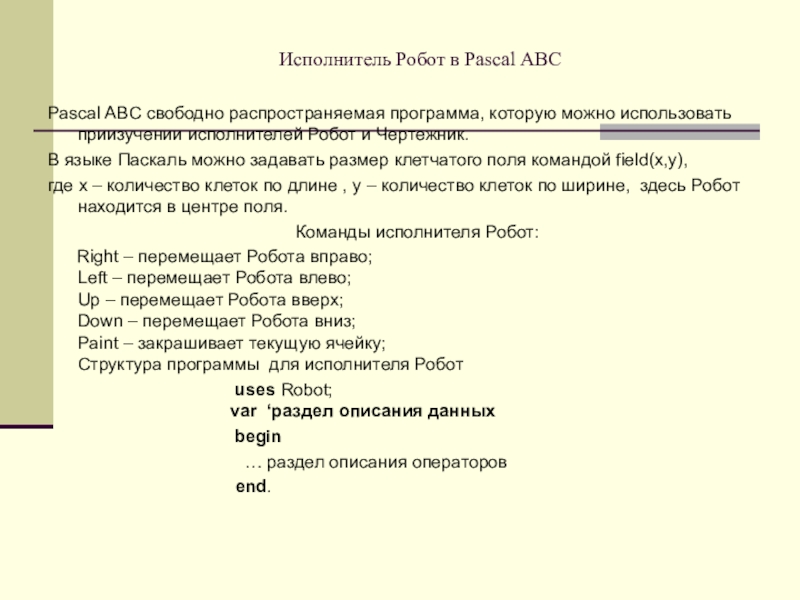
Слайд 12Исполнитель Робот в Pascal ABC
Pascal ABC свободно распространяемая программа, которую можно
использовать приизучении исполнителей Робот и Чертежник.
В языке Паскаль можно задавать размер клетчатого поля командой field(x,y),
где х – количество клеток по длине , y – количество клеток по ширине, здесь Робот находится в центре поля.
Команды исполнителя Робот:
Right – перемещает Робота вправо; Left – перемещает Робота влево; Up – перемещает Робота вверх; Down – перемещает Робота вниз; Paint – закрашивает текущую ячейку; Структура программы для исполнителя Робот
uses Robot; var ‘раздел описания данных
begin
… раздел описания операторов
end.
Слайд 13Задание №5
На клетчатом поле размером 6*6 изобразить букву К, Робот находится
в нижнем левом углу поля.
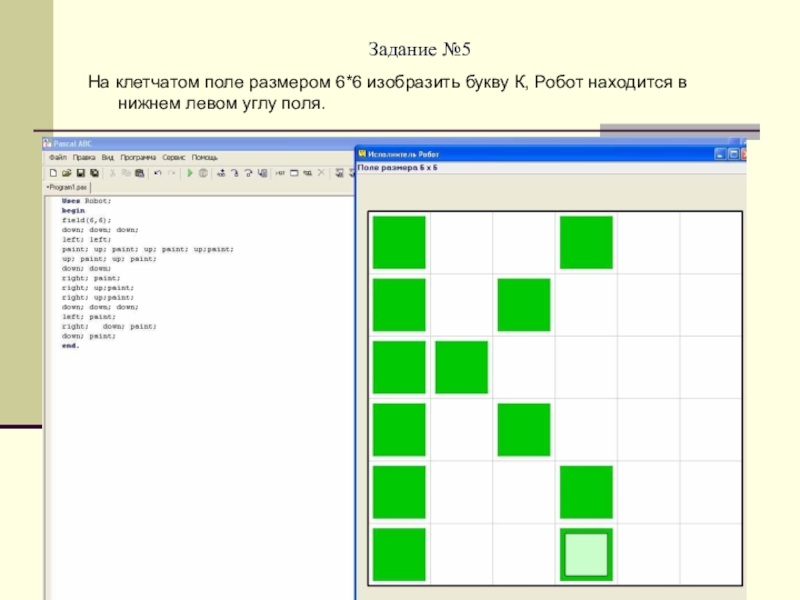
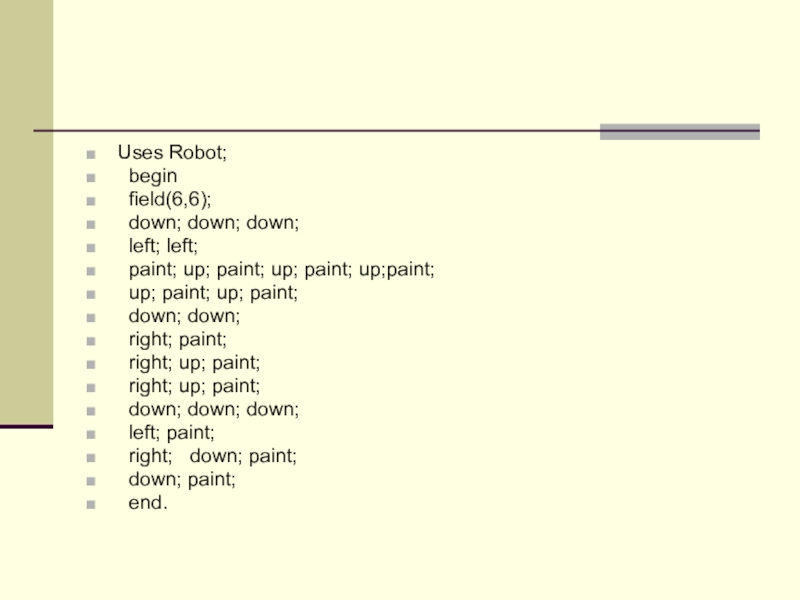
Слайд 14Uses Robot;
begin
field(6,6);
down; down; down;
left; left;
paint; up;
paint; up; paint; up;paint;
up; paint; up; paint;
down; down;
right; paint;
right; up; paint;
right; up; paint;
down; down; down;
left; paint;
right; down; paint;
down; paint;
end.
Слайд 15Можно выполнить это задание с использованием циклической структуры
Uses Robot;
var i:integer;
begin
field(6,6);
for i:=1 to 3 do begin
down; end;
left; left;
for i:=1 to 5 do begin
paint; up; end;
paint;
down; down;
right; paint;
for i:=1 to 2 do begin
right; up; paint; end;
for i:=1 to 3 do begin
down; end;
left; paint;
right;
for i:=1 to 2 do begin
down; paint;
end;
end.
Источник: shareslide.ru
Языки программирования: на каком языке говорит робот?

Язык, на котором говорит робот (не важно, игрушка, робот-пылесос или медицинское оборудование), – это машинный код, набор знаков двоичной системы. Он сложен и малопонятен для человека. Писать на нем программы, то есть закладывать поведение робота, иррационально. Поэтому коммуникация между роботом и человеком происходит по такой схеме:
1. Человек пишет программу на языке программирования.
2. Написанный текст – код программы – проходит через «переводчиков»: компиляторы, интерпретаторы или трансляторы. Они преобразуют язык программирования в машинный код, понятный роботу.
Представьте, что вы хотите что-то объяснить итальянцу через переводчика. Ваш русский язык – это язык программирования, итальянский – это машинный код, ну а переводчик, соответственно, – транслятор, компилятор или интерпретатор.
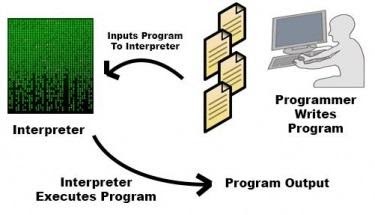
3. Переведенная в машинный код программа попадает в «мозг» роботу. Роль «мозга» может играть схема, чип, микроконтроллер, микрокомпьютер или компьютер. Чем сложнее задачи будет решать робот, тем совершеннее должен быть его «мозг».
Видели собачек в детском магазине, которые начинают лаять, когда вы приближаетесь? В таких игрушках установлена электронная схема с простейшей логикой либо чип. Робот выполняет простейшие действия. Например, двигается по заданной траектории или воспроизводит записанный звук. Для более сложных задач уже потребуется микроконтроллер.
Низкоуровневые и высокоуровневые языки программирования
Сейчас используют несколько сотен языков программирования, которые можно разделить на две большие группы: низкого уровня и высокого.
Языки низкого уровня появились в начале 50-х гг. XX века, с их помощью программировать стало легче, чем на машинном коде. Используются они и сегодня и просто незаменимы в тех случаях, когда робот должен подчиняться строгому контролю. Но при работе с ними есть сложность. Для одного и того же действия, выполняемого роботами разной конструкции, нужно писать отдельную программу.
Захват для роботоруки и робота-экскаватора будет выглядеть по-разному.
С языками высокого уровня – более развитыми и удобными для человека – такой проблемы нет. Особенности конструкции роботов не играют значимой роли, и одну и ту же команду выполнит любой из них. Но программы на таких языках весят гораздо больше, поэтому их пишут только для устройств с большим объемом памяти.
Мы можем договариваться с микроконтроллером через транслятор, и тогда, скорее всего, придется программировать на низкоуровневом языке. Если у микроконтроллера будет плата типа Arduino, то можно перейти на более «человеческий» высокоуровневый язык. Однако робот с несколькими типами управления запросто может оказаться полиглотом: его создатель будет сочетать разные языки для выполнения разных задач.
