
Программа mission planner что это
ПО Mission Planner является бесплатным, с открытым исходным кодом доступный для Windows. Эти инструкции проведут вас через установку Mission Planner для компьютера.
Загрузите последнюю версию ПО Mission Planner для установки
Скачать последнюю версию Mission Planner
Выберите самую последнюю MSI и выберите Загрузить.
Запустите установку
Откройте файл установщика Microsoft (. MSI) и выберите Выполнить для запуска утилиты установки.
Планировщик Миссия Installation Utility
Следуйте инструкциям установки, утилита автоматически обновит и установит необходимые драйвера. Если вы получаете сообщение об ошибке установки DirectX, пожалуйста, обновите ваш DirectX плагин в центре загрузки.
Если вы получаете предупреждение как на картинке ниже, выберите «Установить программное обеспечение этого драйвера», чтобы продолжить.
Выберите установки драйвера в любом случае.
Mission Planner обычно устанавливается в C: Program Files (x86) APM папка Планировщик или C: папка Планировщик Program Files APM. Там же находятся файлы журнала устаноки. На рабочем столе должен появится значек программы во время установки.
Планирование автоматической миссии в Mission Planner / Automatic mission planning in Mission Planner
Запустите Mission Planner
После завершения установки, запустите Mission Planner, нажав на иконку. Mission Planner автоматически уведомляет вас о доступных обновлениях. Пожалуйста, всегда запускать последнюю версию ПО.
Обновление ПО и проблемы при запуске
Иногда после автоматической загрузки обновления ПО программа может попросту не запуститься, это связано с некоректным обновлением (иногда не по вашей вине) для этого рекомендуем обновлять через скачивание и установку ПО Mission Planner
Скачать последнюю версию Mission Planner
Просьба ссылаться на данный ресурс. 2022.
версия 0.75rc
Мы в социальных сетях:
Источник: ardupilot.su
Mission Planner
Mission Planner — это наземная станция управления для ArduPilot. Он обеспечивает настройку и поддержку полета, а также просмотр полетов самописца.
Стало возможным благодаря CubePilot
Последнее обновление
9 нояб. 2022 г.
Инструменты
Безопасность данных
arrow_forward
Чтобы контролировать безопасность, нужно знать, как разработчики собирают ваши данные и передают их третьим лицам. Методы обеспечения безопасности и конфиденциальности могут зависеть от того, как вы используете приложение, а также от вашего региона и возраста. Информация ниже предоставлена разработчиком и в будущем может измениться.
Источник: play.google.com
Mission Planner
Mission Planner — программное обеспечение для настройки и управления ЛА, оснащённого полётным контроллером ArduPilot Mega.
Mission Planner — Primeiros Passos / Mission Planner e Acelerômetro — parte 1
Полное название: Mission Planner Ground Control Station или Mission Planner GCS.
Главный экран
Он же экран полётных данных, также содержащий окно HUD (Heads-up Display).
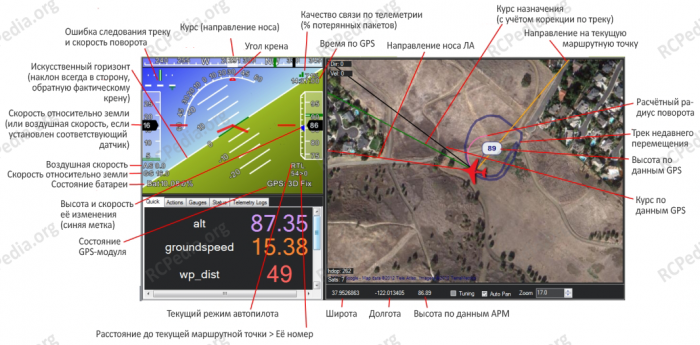
На нём отображаются следующие параметры полёта:
- Красная линия — фактический курс, направление носа (переда) ЛА.
- Зелёная линия — курс назначения с учётом коррекции по треку.
- Чёрная линия — курс, определённый по данным, полученным от GPS (обычно отличается от фактического).
- Жёлтая линия — направление на текущую маршрутную точку, к которой исполняется полёт.
- Desired turn radius — расчётный радиус поворота
- GPS reported altitude — высота по данным GPS
- Latitude — широта
- Longitude — долгота
- Track of recent travel — Трек недавнего перемещения
HUD
Вид окна HUD более крупно:
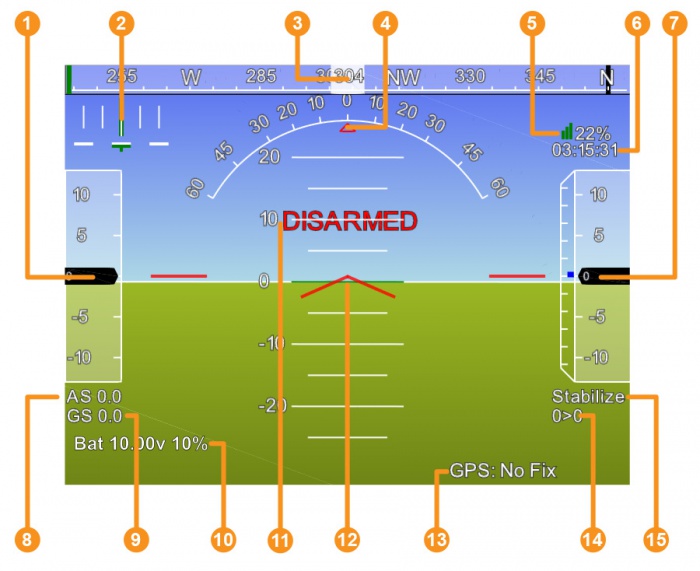
- Air speed или Ground speed — скорость относительно земли (или скорость относительно воздуха, если установлен соответствующий датчик)
- Сrosstrack error and turn rate — ошибка следования треку и скорость поворота
- Heading direction — Курс (направление носа ЛА)
- Bank angle — Угол крена
- Wireless telemetry connection — Качество передачи телеметрийных данных (% потерянных пакетов)
- GPS time — время по данным, полученным от GPS
- Altitude — высота по данным APM (синяя метка показывает скорость изменения высоты).
- Air speed — воздушная скорость (относительно воздуха), показывается только при наличии датчика.
- Ground speed — скорость относительно земли
- Battery status — состояние батареи
- Artificial Horizon — искусственный горизонт, (всегда реверсивен по отношению к крену ЛА).
- Pitch angle — Угол тангажа
- GPS status — состояние GPS-модуля
- Distance to current waypoint > Current waypoint number — расстояние до текущей точки маршрута и её номер
- Current autopilot mode — текущий режим автопилота
Полезно знать о главном экране
- На карте будет показываться текущая позиция только после того, как произойдёт определение координат по GPS. Или в любом случае — при использовании симулятора полёта.
- Как работает искусственный горизонт: когда ЛА кренится вправо, горизонт наклоняется влево. То есть всегда наклоняется в противоположную сторону. Часто это настораживает новичков: дескать, что-то перепутано, но на самом деле всё в норме.
- Следует в любой момент понимать, какой режим автопилота включен. Для того, чтобы полётный контроллер корректно воспринимал команды MAVlink от Mission Planner, он должен работать в одном из «автопилотных» режимах: Stabilize, Fly-by-Wire, Auto и т.п. Если же контроллер находится в режиме Manual, то все команды будут игнорироваться.
- Двойной клик на окне HUD позволит его распахнуть на весь экран на втором экране.
- Для того, чтобы использовать другие карты взамен Google Maps, нужно нажать Ctrl-F и загрузить собственные карты, которые должны быть подготовлены программой Global Mapper.
Guided Mode
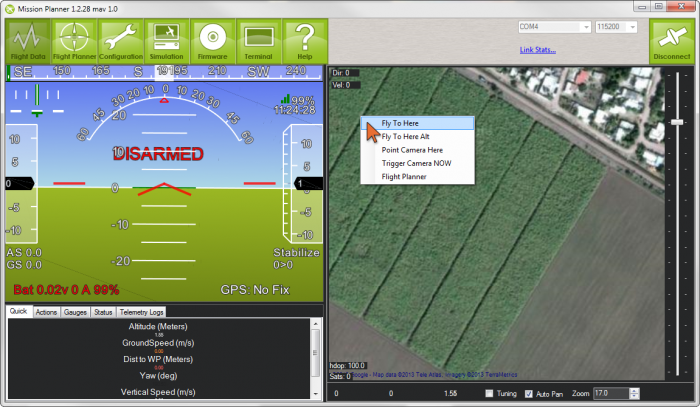
Одной из самых интересных особенностей Mission Planner является возможность управлять ЛА не прибегая к помощи пульта и не готовя заранее маршрут полёта. В окне карты в любом месте можно кликнуть правой кнопкой мыши и выбрать “Fly To Here”, то есть «лети сюда». ЛА полетит в заданную точку и зависнет в ожидании следующей команды. Это и есть режим “Guided Mode”, который обладает и другими интересными возможностями.
Внимание: “Guided Mode” — это самостоятельный режим полёта. Выбрав его, полётный контроллер будет оставаться в этом режиме до тех пор, пока не будет выбран какой-либо другой режим. К примеру, если выбрать точку на карте и дать команду “Fly To Here”, то после прибытия в неё ЛА будет зависать над ней до тех пор, пока из Mission Planner не поступит следующей команды, а именно: либо команды переместиться в другую точку, либо переключения в другой режим. Более того, если переключение произойдёт в режим Auto, то миссия (полёт по маршруту) возобновится с той точки, где она была прервана.
FAQ
Коптер наклоняю влево, а горизонт наклоняется вправо
Так работает искусственный горизонт: когда ЛА кренится вправо, горизонт наклоняется влево, так как показывает отклонение ЛА относительно реального горизонта т.е. всегда наклоняется в противоположную сторону. Часто это настораживает новичков: дескать, что-то работает неправильно, но на самом деле всё в норме.
В новых версиях Mission Planner пустые поля
Зайти на основную страницу Mission Planner , нажать комбинацию Ctrl+F, нажать Param Gen — это перезагрузит информацию о параметрах и всё будет нормально отображаться.
Значение настроек не сохраняются
К примеру, параметр Altitude Hold P в CONFIG/TUNING->Extended Tuning можно менять но значение не сохраняется. Так же и другие параметры (в этом или других окнах). Замечено в свежих версиях Mission Planner (глюки?). Как с этим бороться:
- отключиться в Mission Planner от контроллера, затем заново подключиться;
- установить настройки по-умолчанию;
- найти и поменять параметр в полном списке параметров Mission Planner.
Невозможно соединится с удаленным сервером (карта)
Можно попробовать поменять провайдера карт (на экране планировки миссий). Например, Яндекс-карты хорошо работают.
Красные области на карте — что и как


По задумке — это запретные или ограниченные для полётов территории (вокруг аэропортов, режимных объектов и т.п.). По факту, полёты и выполнения миссий не ограничиваются. Но пилотам следует принимать во внимание эти предупреждения и, по возможности, не осуществлять полёты в этих территориях.
В папке Mission Planner есть файл airports.csv, если удалить из него все данные, и вместо них написать «1» в первой строке, то Mission Planner перестанет делать предупреждения на карте.
Параметры Mission Planner
Ссылки
- Разные версии Mission planner
- Сервис просмотра графика
См. также
- Tower (DroidPlanner 3) — приложение для настройки и управления APM на Android-устройствах.
- ArduPilot
Источник: multicopterwiki.ru
Программа mission planner что это
Первым делом скачайте и установите утилиту MissionPlanner Installer, она совместима с Windows 7, Windows 8, Windows Vista, для Windows XP установите Framework 3.5 скачать здесь.
Установка самая обычная:
в процессе установки будет установлен драйвер необходимый для обмена данными с платой APM, соглашайтесь с установкой не подписанного драйвера

После установки ПО Mission Planner подсоедините APM к USB порту micro USB шнура

Откройте Mission Planner
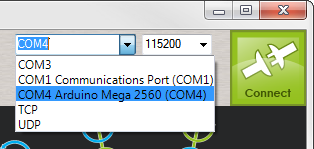
Здесь выберите нужный COM порт, необязательно он будет COM4 (нумерация определяется операционной системой) главное что надпись Arduino Mega 2560 говорит о том, что на этом COM порту подключен Ваш APM.
Не спешите нажимать кнопку Connect с начало необходимо загрузить прошивку.

Перейдите в раздел HARDWARE -> Install Firmware, где и выбираем иконку нужного нам летательного (или не летательного) аппарата:
Если у Вас уже имеются ранее установленные прошивки нажав Ctrl-O появится выпадающий список, позволяющий загрузить более ранние версии.
Если Вы устанавливаете полетный контроллер на мультироторный летательный аппарат (дрон) необходимо выбрать тип рамы в разделе Initial setup -> Mandatory Hardware -> Frame Type:
Источник: hellhog.ru