
В последней статье цикла рассмотрим базовые настройки полетного контроллера после которых вполне можно начать свой первый полет.
Установка программного обеспечения
Полетный контроллер DJI NAZA очень прост в работе. Его установка и настройка очень проста, и летает он при этом очень стабильно. С другой стороны он полностью закрыт и вы не сможете переделать или дополнить его функции. Но! До настройки полетный контроллер не знает, чем он управляет, и полететь без предварительной настройки никуда не получится.
Перед настройкой обязательно снимите винты!
Для настройки скачайте и установите программу Naza-M Assistant Software v2.20. Подайте питание на коптер и подключите полетный контроллер по USB.
Настройка
В стартовом окне запуска вы увидите основные настроенные параметры:
Стартовое окно NAZA Assistant
Перейдите сразу в меню Basic на вкладку Aircraft. На этой вкладке необходимо произвести выбор коптера:
Выбор типа коптера
У нас X-коптер, который летает развалом вперед. Обратите внимание на направление вращения двигателей. Оно должно строго соответствовать! Для проверки есть функция Motor Test. Она позволит на малый промежуток времени с небольшим газом запустить двигатели по отдельности.
Betaflight — подготовка программ, подключение и прошивка
Убедитесь, что винты сняты, все подключено корректно и нигде ничего не задевает. Нажмите кнопку Motor Test, подтвердите, что все подготовительные операции выполнены и вы увидите следующее окно:
Вы можете понажимать кнопки и проверить корректность работы двигателей.
На вкладке Mounting задаются параметры установки GPS-антенны. У нас нет GPS-модуля, так что мы пропускаем эту вкладку.
Перейдите на вкладку RC. Здесь вы сможете настроить параметры системы радиоуправления.
Здесь можно проверить работу системы радиоуправления. В центре экрана вы видите монитор стиков. Включите пульт и подвигайте стиками — ползунки должны двигаться в соответствии с вашими командами.
Диапазон сигналов пульта необходимо откалибровать. Для этого в поле Command Stick Calibration нажмите кнопку Start. Когда начнется процесс калибровки вам нужно будет покачать стики между крайними положениями и нажать Stop. После этого установите все стики в среднее положение и убедитесь что все ползунки тоже встали в среднее положение.
В этом окне есть ещн мониторы дополнительных каналов. Их можно использовать для регулировки параметров управления, режимами управления и т.д. Мы эти функции не используем.
На следующей вкладке Gain можно настроить остроту управления аппаратом.
Basic Gain — реакция на стики по всем четырем каналам. Чем больше, тем резче будет коптер отрабатывать команды.
Attitude Gain — скорость реакции на внешний воздействия. Например, на дуновение ветра. Чем больше, тем интенсивнее коптер будет возвращаться на удерживаемую позицию.
Remote Adjust — удаленная настройка. Позволяет при использовании дополнительного канала управления подстраивать коэффициенты с пульта.
✔ Настраиваем гоночный квадрокоптер от начала до конца. Betaflight 3.2+ [Настройка Betaflight]
При первом полете рекомендуется оставить все эти коэффициенты без изменения. Со временем, вы наберетесь опыта и подстроите их под себя.
На этом выставление основных настроек закончено и вы можете приступить к первым полетам!
Как обычно, ссылки на остальные статьи цикла:
Часть 1. Что такое квадрокоптер
Часть 2. Элементы квадрокоптера
Часть 3. Все об аккумуляторах для квадрокоптеров
Часть 4. Рама квадрокоптера
Часть 5. Подсветка коптера
Часть 6. Подключение элементов квадрокоптера
Часть 7. Настройка пульта Turnigy9x для коптера
Часть 8. Настройка регуляторов оборотов бесколлекторного двигателя
Часть 10. Гиростабилизированный подвес для камеры SJ4000
Настройка полетного контроллера
Скачайте последнюю версию Betaflight Configurator из официального репозитория и установите её на свой компьютер. Запустите Betaflight Configurator. Зажмите кнопку на полетном контроллере и подключите его к компьютеру с помощью разъема Micro USB. Убедитесь, что в Betaflight Configurator полетный контроллер отображается в режиме DFU. Нажмите на кнопку Update Firmware.
В списке плат выберите BETAFLIGHTF4, в списке версий выберите последнюю стабильную версию. Нажмите Load Firmware [Online] , а затем Flash Firmware . 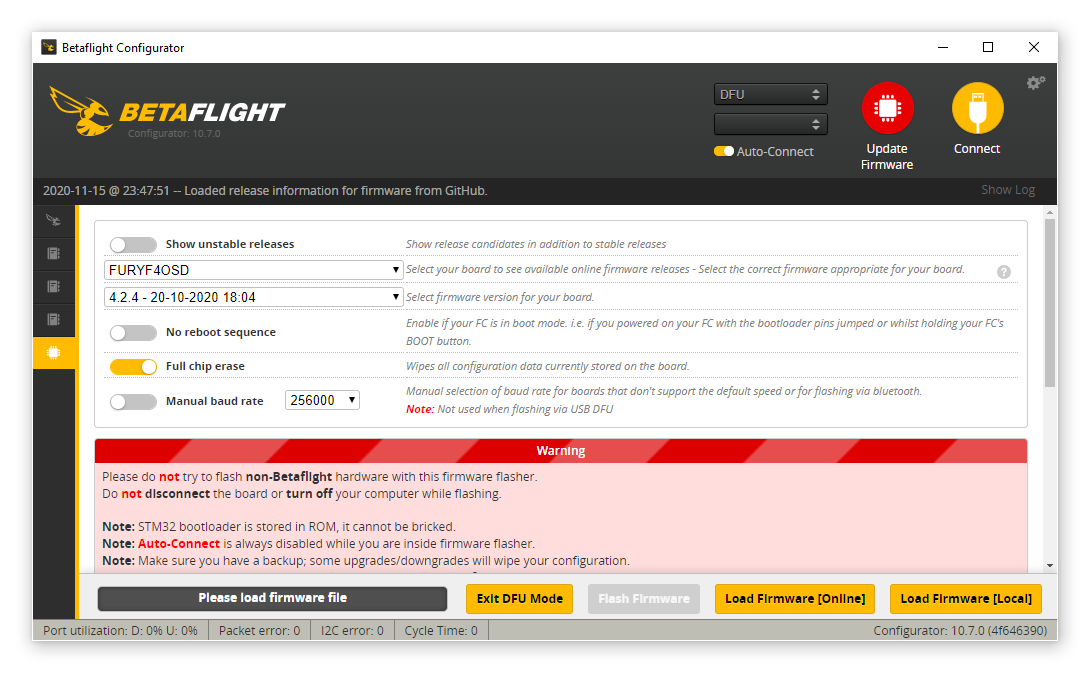 После удачной прошивки подключитесь к полетному контроллеру и перейдите во вкладку CLI Откройте файл конфигурации, скопируйте его содержимое и вставьте в строку ввода команд, затем нажмите Enter . Полетный контроллер перезапустится. На этом его настройка закончена.
После удачной прошивки подключитесь к полетному контроллеру и перейдите во вкладку CLI Откройте файл конфигурации, скопируйте его содержимое и вставьте в строку ввода команд, затем нажмите Enter . Полетный контроллер перезапустится. На этом его настройка закончена. 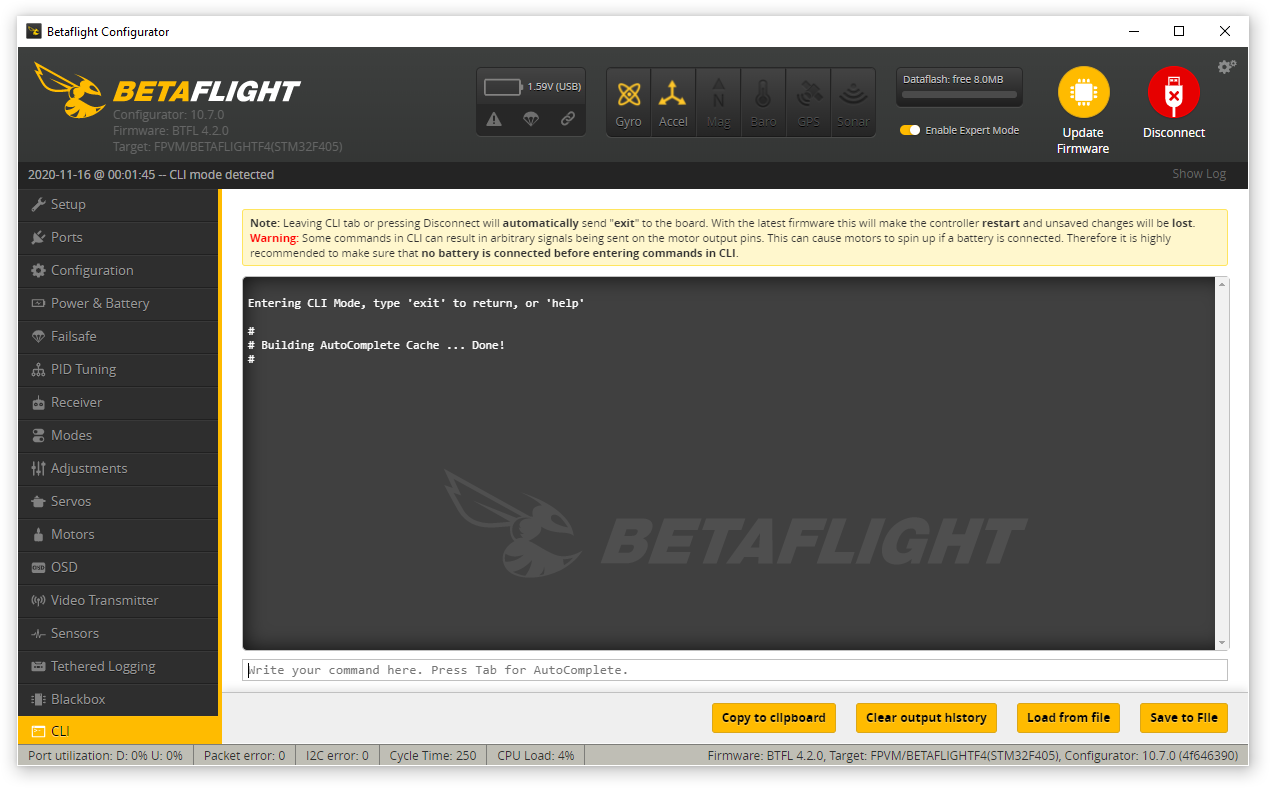
Настройка ESC
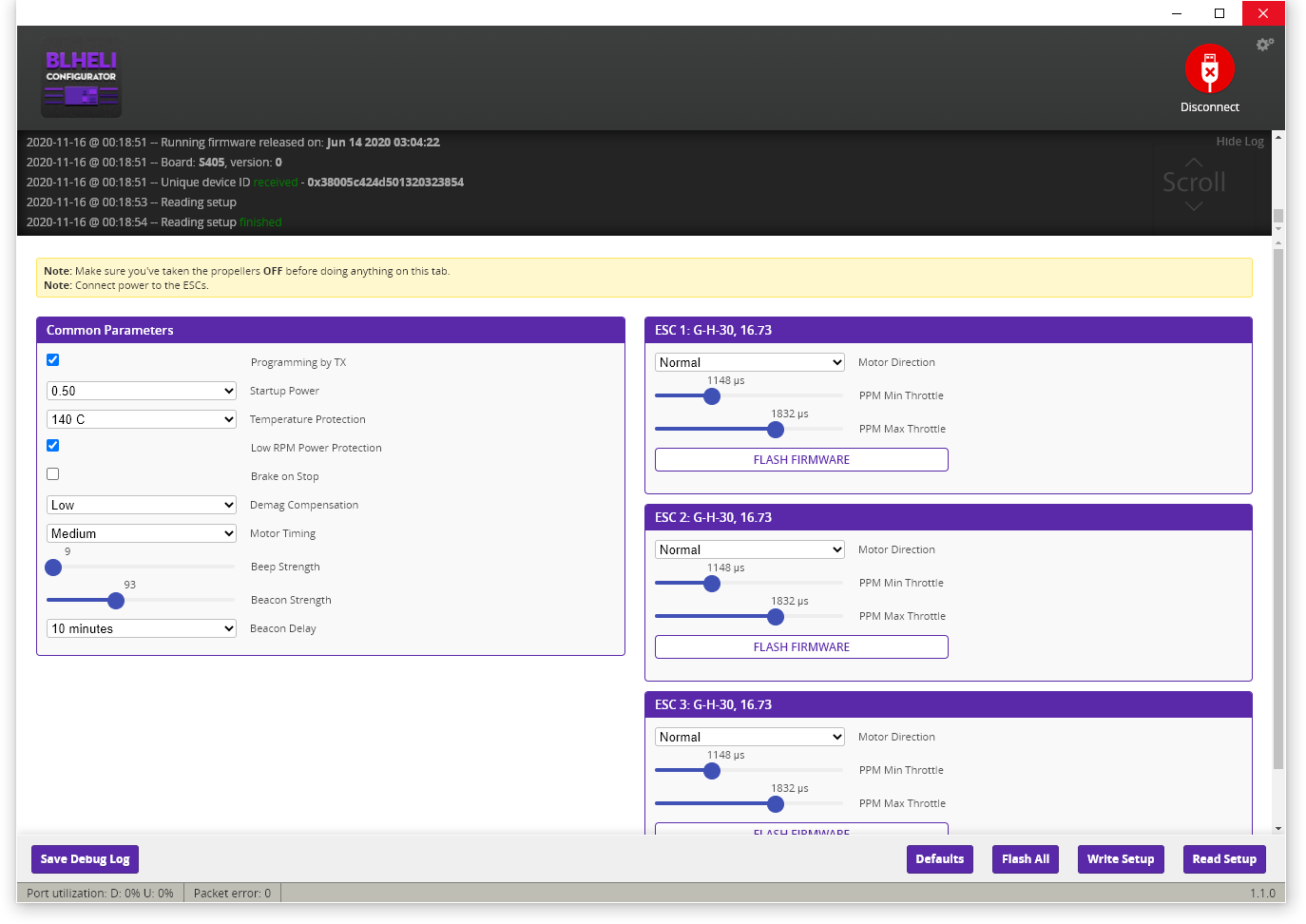
Откройте Betaflight Configurator и перейдите во вкладку Motors. Подключите аккумулятор, предварительно убедившись, что на дроне отсутствуют пропеллеры. Нажмите на переключатель I understand the risks, после чего плавно поднимите ползунок Master вверх до тех пор, пока все моторы не начнут слегка вращаться.
Проверьте, вращаются ли все моторы так же, как указано на картинке: 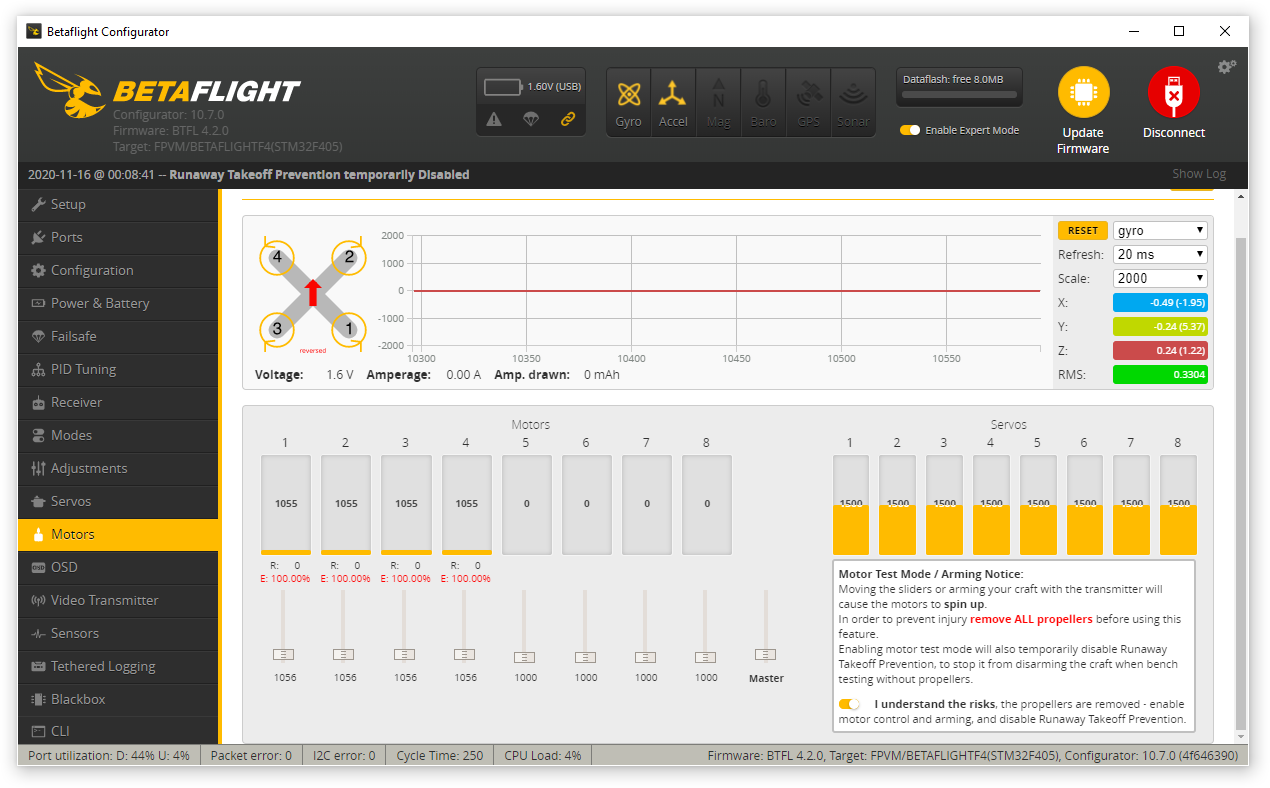 Если все моторы вращаются в нужном направлении, то их дальнейшая настройка не требуется. Если есть моторы, которые вращаются не в ту сторону, запомните их номера, для них нужно будет сменить направление вращения. Установите BLHeli Configurator из официального репозитория.
Если все моторы вращаются в нужном направлении, то их дальнейшая настройка не требуется. Если есть моторы, которые вращаются не в ту сторону, запомните их номера, для них нужно будет сменить направление вращения. Установите BLHeli Configurator из официального репозитория.
Закройте Betaflight Configurator, перейдите в BLHeli Configurator, нажмите на копку Connect, а затем Read Setup Read Setup. Аккумулятор в этот момент должен быть подключен к дрону. 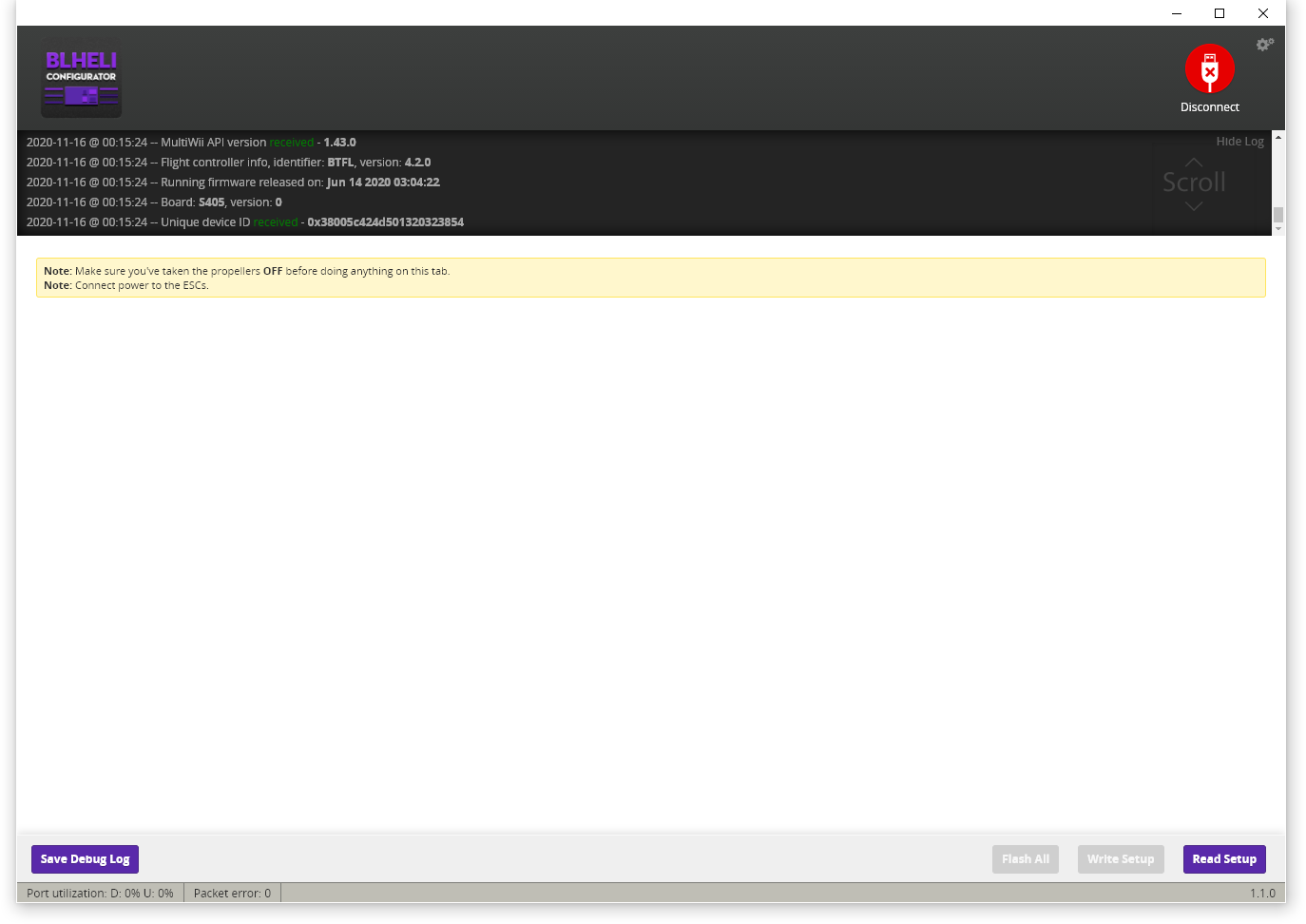
 На этом настройка дрона завершена, можно устанавливать пропеллеры и приступать к полетам.
На этом настройка дрона завершена, можно устанавливать пропеллеры и приступать к полетам.
Источник: racemini.tech
Betaflight Configurator

Betaflight Configurator — конфигуратор, мультиплатформенное программное обеспечение для настройки различных ЛА (квадракоптеров, гексакоптеров, октокоптеров и разного рода самолётов) под управлением полётных контроллеров, работающих на прошивке BetaFlight.
Можно сказать, что Betaflight Configurator — это новый этап в жизни прошивки BetaFlight. Дело в том, что по мере своего развития BetaFlight всё больше отдалялся от CleanFlight и интерфейс его конфигуратора становился всё более бесполезным, так как всё больше настроек делалось через консоль CLI.
Betaflight Configurator работает в виде приложения в среде Google Chrome. Установить Скачать
Важно!
Для правильной работы конфигуратора требуется, чтобы в полётный контроллер была «залита» самая свежая прошивка BetaFlight (соответствующая версии конфигуратора). И тут есть два важных нюанса:
- Приложение Betaflight Configurator в браузере Chrome обновляется автоматически.
- При обновлении прошивки сохранённые в полётном контроллере ваши настройки могут нарушиться.
Поэтому настоятельно рекомендуется сохранять резервную копию настроек.
Установка Betaflight Configurator
Через интернет-магазин Chrome
- Запустить браузер Google Chrome (предварительно установив, если не установлен) или Chromium
- Перейти на страницу приложения Betaflight Configurator
- Нажать кнопку «+ Установить»
Вручную
- Сохранить репозиторий в локальной папке (например, D:betaflight-configurator) или скачать его в виде ZIP-файла.
- В Chromium или Google Chrome выбрать в меню Дополнительные инструменты -> Расширения (Tools -> Extension)
- Включить чекбокс «Режим разработчика» («Developer mode»).
- Нажать кнопку «Загрузить распакованное расширение. » («Load unpacked extension. «) и указать папку, где лежит конфигуратор (например, D:betaflight-configurator).
После завершения установки пиктограмма Betaflight Configurator появится в Chrome в списке приложений на странице «Сервисы» («Apps») по адресу chrome://apps/
Полезное
- Включите WebGL. Для лучшей производительности приложения включите в браузере Chrome в меню «Настройки -> Показать дополнительные настройки -> Система» чекбокс «Использовать аппаратное ускорение (при наличии)» (Use hardware acceleration when available).
Настройка коптера в Betaflight Configurator
Те настройки, которые обязательно нужно сделать, а также советы и рекомендации.
Настройка пульта
Необходимо проверить минимальные, средние и максимальные значения сигналов всех 4-x стиков пульта в конфигураторе. Делается это во вкладке Receiver. Идеальные значения составляют 1000 — 1500 — 2000. Отклонения, даже самые минимальные (+/- несколько единиц), от этих значений крайне нежелательны, особенно от центрального положения (1500), которое полётный контроллер будет воспринимать как лёгкое подруливание, которое он будет обрабатывать и квадрокоптер постоянно будет сносить в какую-то сторону. Поэтому крайне желательно уделить время и при помощи доступных настроек пульта добиться идеальных значений.
- Видео по настройке крайних и средних значений стиков пульта FrSky TARANIS
- Turnigy 9XR PRO — настраивается в пункте меню Limits. Также можно выполнить настройку через программу eePskye (вкладка Limits), но это неудобно, так как результат сразу не видно в Betaflight Configurator. Сделать это необходимо для каждого из четырёх каналов управления.
Общую информацию по настройке пультов см. в отдельно статье: Принципы настройки пультов Turnigy и Taranis
Далее, по вкладкам Betaflight Configurator:
Setup
Тут нужно откалибровать акселерометр.
Ports
- При использовании OSD следует включить MSP для порта UART2.
- Ни в коем случае нельзя отключать MSP для порта UART1.

Configuration
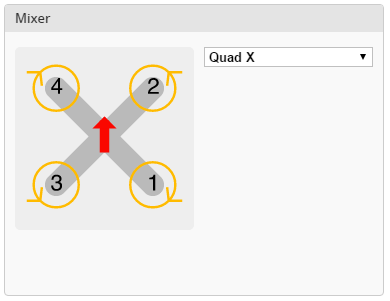
Mixer
Тут выбрать (а в большинстве случаев — оставить по умолчанию) конфигурацию коптера, заодно ещё раз проверив расположение и направление вращения моторов/пропеллеров.
Board and Sensor Alignment
Если полётный контроллер, уже установленный на раму коптера, «смотрит» не в ту сторону, как указано на схеме в Mixer (направление стрелки на плате/корпусе полётного контроллера не совпадает с направлением стрелки на схеме), то тут можно указать куда и насколько он оказался повёрнут.
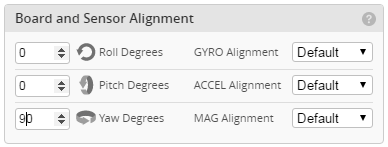
Корректность этих настроек можно будет потом проверить во вкладке Setup.
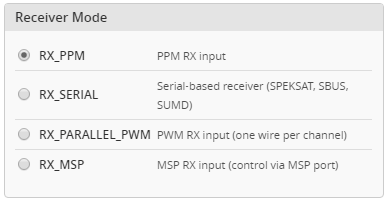
Receiver Mode
Выбор типа (сигнала) используемого приёмника.
- RX_PPM — композитный PPM-сигнал, самый популярный тип многоканального управляющего сигнала, передаваемого по одному сигнальному проводу.
- RX_SERIAL — последовательный управляющий канал (SBus, SumD или сателлит Spektrum).
- RX_PARALLEL_PWM — «обычный», параллельный способ подключения: каждый канал по отдельному проводу с PWM-сигналом.
- RX_MSP — управление через MSP-порт.
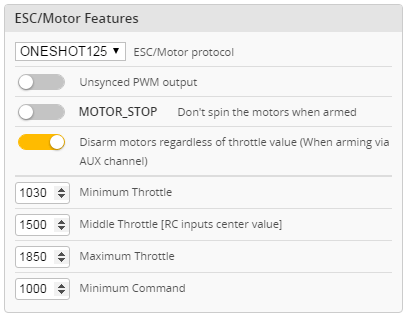
ESC/Motor Features
- Unsynced PWM output — рекомендуется отключить, если не используется MULTISHOT.
- MOTOR_STOP — отключить, если нужно, чтобы моторы всегда вращались в заармленном состоянии.
- Minimum Throttle — регулирует обороты на «холостом ходу» (при стике газа в нуле), подбирается опытным путём. Все моторы должны уверенно держать минимальные обороты.
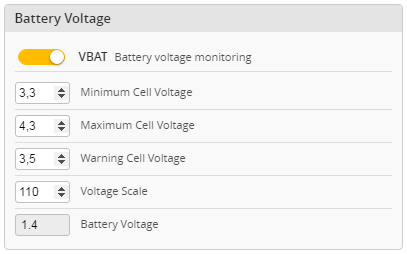
Battery Voltage
VBAT — активация индикатора заряда батареи
Остальные параметры — показания заряда аккумулятора «на банку» для различных уровней индикации. Если в них есть погрешность, её можно убрать настройкой Voltage Scale.
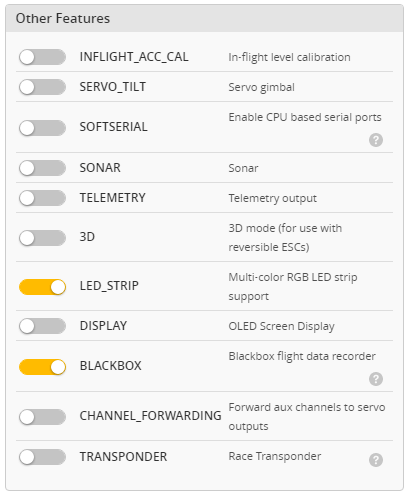
Other Features
- INFLIGHT_ACC_CAL — включение опции калибровки акселерометров (если они есть) по горизонту во время полёта.
- SERVO_TILT — управление наклоном камеры сервомашинкой (если она есть).
- SOFT_SERIAL — ?
- SONAR — включение ультразвукового датчика высоты (сонара).
- TELEMETRY — выход телеметрии.
- 3D — 3D-режим, с возможностью инверсного полёта, «вверх ногами» (если регуляторы моторов поддерживают реверс вращения).
- LED_STRIP — включение светодиодной подсветки.
- DISPLAY — поддержка подключаемого к полётному контроллеру ЖК-экрана.
- BLACKBOX — включение функции BlackBox.
- CHANNEL_FORWARDING — трансляция сигналов дополнительных каналов приёмника на управляющие выходы полётного контроллера.
- TRANSPONDER — использование бортового транспондера на оборудованном гоночном треке.
FAQ
В среднем положении стиков коптер дёргается
Значения стиков в среднем положении прыгают вокруг 1500
Это следствие и причина — одна и та же проблема. Для её решения в BetaFlight (и CleanFlight тоже) есть специальная команда, настраивающая фильтрацию подобной проблемы.
set deadband = 6
Значение может быть от 0 до 32 и с его повышением чувствительность управления снижается. Управление становится более мягким. Надо понимать, что после определённого порога мягкость превратится в «ватность», поэтому следует выбирать минимальное значение, при котором дёрганья исчезнут.
Ссылки
- Приложение Betaflight Configurator в интернет-магазине Chrome.
- Betaflight Configurator на гитхабе.
- BetaFlight
См. также
- CleanFlight Configurator — конфигуратор, на основе кода которого сделан Betaflight Configurator.
Источник: multicopterwiki.ru