
Всем Решил на моем канале на youtube делать видеоролики по подключению и настройке Arducopter apm 2.6.Думаю многим начинающим будет полезно посмотреть.Писать большую статью не буду,так как в видео постарался максимально просто,подробно и поэтапно все рассказать и показать.Каждую неделю буду добавлять по одному видео по Ардукоптеру,так что подписывайтесь на мой канал кому будет интересен контроллер,и полеты FPV.
Пишу не для плюсиков,а чтоб поделиться своим опытом.
Точная и быстрая настройка PID:
Завтра по просьбам сделаю видео по настройке пидов с помощью функции AutoTune,а то много вайна что ввожу в заблуждение людей,и не правильно настраиваю.
Еще раз прошу,не торопитесь,делаю все по шагово,с элементарных настроек к продвинутым.
Анонс по следующим видеороликам:AutoTune,прошивка PPM-encoder,подключение и настройка датчика тока он же powermodule,прошивка и настройка minimosd,настройка БК подвеса.
Ublox M8N, configuration and functional testing
Я понимаю,что есть люди более продвинутые в вопросе Ардукоптера,многие занимаются им с самого начала проектаЯ не претендую на оригинальность и безусловную правоту,я всего лишь делюсь своим опытом в познании Арду,и делюсь лишь тем что сам проверил,а так же подтверждаю демонстрациями полетов.
Добавил видео Autotune mode :
Ждем обновление темы свежим видео,или подписываемся на мой канал.
Добавил еще одно полезное видео по прошивке PPM-encoder:
Добавил видео по подключению и настройке Power Module:
Добавил видео по настройке ОСД:
Источник: www.parkflyer.ru
Прошиваем контроллер APM

Прошивка контроллера является самым интересным и красивым процессом подготовки нашего коптера к полету.
Программа для контроллера предоставляется с открытым исходным кодом («open source»), что позволяет во первых всем желающим настроить аппарат под себя, во вторых более быстро выявить и исправить ошибки, в третьих сделать необходимые доработки в коде. Разработчик рекомендует всегда загружать прошивку (далее по тексту понимаем «программа») крайней (все суеверные, поэтому слово «последней» не используем) версии из Mission Planner. Но как показывает практика — не всегда это приводит к хорошим результатам и полетам без падений. Но на первых порах сделать лучше как рекомендуется. Приступим к процессу!

Первую попытку подключения контроллера мы делали ранее (Я получил контроллер! Что дальше?). На этом этапе мы проверили исправность основных датчиков. Теперь у нас задача — загрузить осмысленно прошивку (не известно же, что и как сделали китайцы) и в дальнейшем изучать и настраивать ее. Начинаем процесс с подключения контроллера кабелем micro-USB к ПК.
Здесь уже проблем с драйвером быть не должно, т.к. мы его установили ранее. Запускаем Mission Planner. В правом верхнем углу нажимаем на выпадающий список и выбираем порт, к которому подключен контроллер. Необходимо выбрать скорость подключения 115200 бод. Кнопку «Connect» НЕ нажимаем!


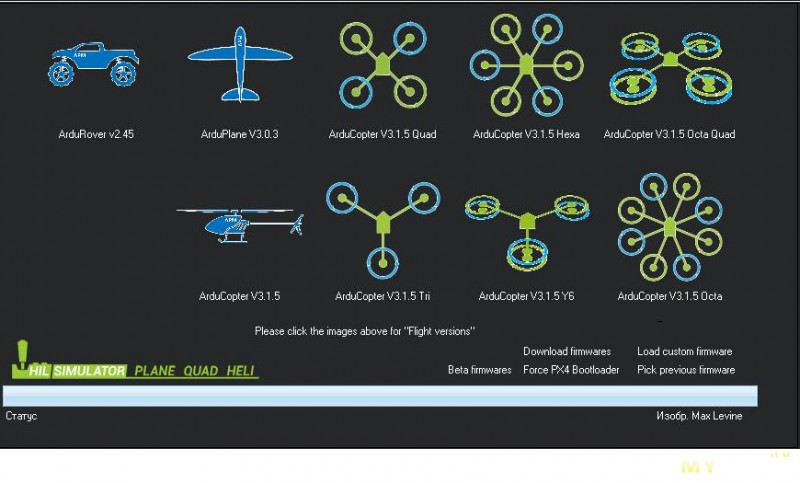
Далее нажимаем кнопку «Initial Setup» сверху слева, затем нас интересует строка «Install Firmware». Открывается окно с отображением моделей (автомобиль, самолет, вертолет и коптер) и конфигураций коптера. На данный момент необходимо, чтобы на компьютере было установлено соединение с Интернет. Программа загружает список текущих версий прошивок.
Большинство, думаю, сначала собирают квадрокоптер или гексакоптер с «х» или «+» расположением моторов (это будет настраиваться дальше). Выбираем требуемую конфигурацию (нажимаем мышкой).
![]()
Далее подтверждаем, что хотим загрузить эту прошивку, нажав «Yes» в появившемся диалоговом окне. Процесс загрузки прошивки начался.
Необходимо дождаться завершения и надписи «Done» слева снизу от прогресс-бара. Загрузка прошивки завершена — поздравляем!
Далее нажимаем кнопку «Connect». В появившемся окне «Connecting Mavlink» дожидаемся надписи «Done». В Mission Planner должна загореться кнопка с надписью «Disconnect». Отключаемся. Проверка завершена — загрузка прошивки прошла успешно.
Если все выглядело иначе и появлялись ошибки, значит скорее всего сделали что-то не правильно, например ошиблись с выбором COM-порта или скорости порта. Также могут быть проблемы с USB кабелем (заменить на более качественный или короткий). Также убедитесь, что контроллер подключен к ПК напрямую без USB-хаба. Необходимо проверить и попробовать загрузить прошивку еще раз.
Реже может оказаться, что по каким-то причинам отсутствует загрузчик на основной микросхеме контроллера — Atmega2560. Старая прошивка должна работать дальше, но нам необходимо сделать все правильно, поэтому приступаем к прошивке загрузчика Atmega2560 и после этого опять возвращаемся к началу данной статьи.

После того, как все успешно загрузилось, нам надо предостеречься от возможных последующих проблем в виде непонятных ситуаций при работе режимов и проблем с изменением настроек. После каждого изменения (обновления или отката) прошивки на контроллере, необходимо выполнить процедуру очистки EEPROM (памяти настроек). Для этого нам необходимо воспользоваться терминалом. Открываем вкладку «Terminal», выбираем скорость 115200 бод, определяем правильный порт. Далее подключаем кабель USB к контроллеру и быстро(за 2-3 секунды) нажимаем кнопку «Connect» в окне.
После чего необходимо 3 (на практике 5) раза нажать клавишу Enter. Должно появиться приглашение с номером версии прошивки. Далее нам необходимо набрать команду «setup» и нажать клавишу Enter, затем набрать «erase» и опять нажать клавишу Enter. Необходимо дождаться надписи «EEPROM clear… done», что свидетельствует о том, что память очищена.
Далее набираем команду «reset» и нажимаем клавишу Enter. Появится надпись о том, что контроллер необходимо перезагрузить. Нажимаем клавишу «Y» (yes) на клавиатуре, после чего нажимем на кнопку «Reset» на контроллере. Необходимо дождаться перезагрузки платы и опять несколько раз нажать клавишу Enter, чтобы появилось приглашение терминала. Выше видим надпись об успешном сбросе настроек.

В крайних прошивках, начиная с ранних бета версий 3.2, терминал вырезали ввиду нехватки места. Сброс осуществляется через меню в Mission Planner. Необходимо подключиться к контроллеру, дождаться загрузки параметров. Затем открыть меню «Config/Tuning», в нем найти раздел «Full parameter list» и нажать кнопку «Reset to default».
Теперь у нас на контроллере имеется прошивка с заранее выполненным сбросом и установкой первоначальных значений для текущей версии. Можно переходить к следующему шагу!
Update 20.11.2014: Добавлена информация по сбросу настроек через MP.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.
Источник: apmcopter.ru
Полетный контроллер APM 2.6,обзор и полная видеоинструкция.

Всем привет. Очень давно не заходил на mysku.club и не писал обзоры, от части из за не хватки времени, от части из за ситуации в Украине 🙁
В общем выдался свободный вечер и решил написать обзор, по моему любимому контроллеру APM 2.6, так как набралось большое количество видео материала по настройке и сборке.Но думаю писать я буду по минимум, за то будет очень много видеороликов, не зря же я столько работы проделал :)Нус, начнемс.
Контроллер АРМ на сегодня самый многофункциональный и не дорогой, его используют чаще всего на мультикоптерах (прошивка Arducopter ) и на самолетах (прошивка Ardupilot) а также поддерживает автомобиль и вертолет, в общем вот платформы которые поддерживает контроллер :У АРМ самое большое количество полетных режимов из всех контроллеров что есть на рынке, возможность управлять дроном с помощью смартфона или планшета, при этом открывается огромный функционал: создание полетного задания, управление, переключение режимов, мониторинг и телеметрия с указанием всех данных, и многое другое… Минус этого контроллера в том, что он не летает из «коробки», а требует знаний и серьезной подготовки.Но я в своих видео максимально просто и подробно постарался объяснить от А до Я, надеюсь поможет новичкам, и будет полезен людям кто решил освоить АРМ.
В данной статье и видео будет рассмотрено подключение контроллера к квадрокоптеру, в дальнейшем будет такой же видео курс по Ardupilot то есть по установке на самолет.
В апреле месяце появился на Бангуде полный комплект АРМ 2.6 за соблазнительные 137 доллара, на то время это была наверное самая низкая цена за такой комплект.
Я конечно ожидал подвоха за такую цену, но жабка одобрительно кивнула и ее в последствии не разочаровал, комплект оказался качественным, и все сразу работало.Посылка дошла очень быстро, даже двух недель не прошло.
Комплект поставки в себя включал: контроллер АРМ уже с коробочкой, демпферная площадка под контроллер,GPS модуль с магнитометром в корпусе и со стоечкой, радиотелеметрия 433мГц,Minimosd и Power Module, не плохо за такую сумму 🙂 (видео с распаковкой и комплектацией выше в начале статьи) Единственное чего нет в комплекте, и будет нужно для прошивки ОСД это FTDI программатор, его можно купить там же на Бангуде, ТЫЦ

Первое что желательно сделать это прошить PPM-encoder, это нас сразу убережет от дальнейших танцев с бубном.В любом случае всегда желательно залить свежую прошивку PPM-encoder для правильной отработки при фалсейве.Инструкция по прошивке:
Так же можно сразу залить правильный конфиг в модуль GPS, хоть в данном наборе ГПС работал нормально, я все равно перестраховался.Инструкция по настройке GPS:
Приступаем к сборке, подключению и прошивке самого контроллера.Подробно в этом видео:
После подключения и прошивки, необходимо настроить Пиды квадрокоптера.
Простая настройка PID значения Pitch and Roll с помощью крутилки на аппаратуре:
Более продвинутая настройка PID с помощью режима Autotune mode:
После настройки пидов, пришло время подключить радиотелеметрию.Подробно о использовании телеметрии с смартфоном или планшетом, а так же о полетных режимах и настройки Фалсейва:
Теперь после всех настроек можно подключать Power Module, но его мы будем использовать только как датчик тока.Видео о настройке и по подключению:
Пред подключением ОСД и использования квадрокоптера для FPV полетов, стоит задуматься о правильном питании контроллера.Так как все отказы АРМ происходят именно из за плохого питания.Подробно о правильной запитке контроллера:
Ну или если нет возможности организовать питание как у меня, купить любой ВЕК на 5волт, хотя он на 100% надежен не будет.А запитывать от любого Power Module который позиционируется как для АРМ, я вообще не рекомендую, только использовать как датчик тока.
Настало время подключить MinimOSD.Подробно о прошивке, настройке и подключению:
Теперь можно летать и радоваться 🙂
Надеюсь вам понравился мой вариант статьи: Мало букаФ-Много фильмов 🙂
Пройдя поэтапно все настройки согласно моих видеоинструкций, вы наверняка взлетите.Думаю видео материала вам будет достаточно для постижения дзена контроллера АРМ, и целого дня чтоб все пересмотреть.
Ставим лайки кому понравилась проделанная работа по видеоурокам, а так же чтоб у меня был стимул сделать подобный курс по Ардупилоту.
Планирую купить +75 Добавить в избранное Обзор понравился +45 +110
- 11 августа 2014, 01:40
- автор: cezarepicentr
- просмотры: 141128
Источник: mysku.club