
ABB offers several software tools to ease and enhance the use of ABB drives. Especially when straightforward routines cannot be applied, these tools provide a user-friendly and easy-to-use approach for the selection, commissioning and use of ABB drives.
Engineering tools:
for dimensioning drives and motors, DOWNLOAD here.
for dimensioning a braking chopper and resistor
for finding an adequate drive to replace an old one
for comparing AC drive control against traditional flow control methods in fans
for ACSM1, ACS55, ACS150, ACS350, ACS550 and ACH550 products
for comparing AC drive control against throttling, on/off and hydraulic coupling control in pumps.
Integration and programming tools
for Windows TM based monitoring of ABB industrial drives
for adaptive programming of ABB industrial drives
Источник: www.ab-drive.ru
Basic Setup with Start Assistant for ABB ACS580 AC Drive
Управляем ABB роботами с помощью FlexPendant
Просьба: если вы здесь увидели какие-то ошибки или неточности то просьба сообщить об этом в комментариях или написать мне. Если вы хорошо разбираетесь в робототехникe или очень хорошо знакомы с RobotStudio свяжитесь со мной 🙂
ABB роботы
Все роботы компании ABB это манипуляторы, которые используются в основном на производствах, в лабораториях или на складах. В каталоге компании [ссылка удалена мод.] можно встретить такие типы роботов как: SCARA роботы, DELTA роботы, коллабративные роботы (коботы), индустриальные манипуляторы (5-6 осевые)
Интересный факт: к ABB обращаются множество клиентов чтобы использовать роботов для покраски. ABB пришлось сделать отдельную линейку роботов.
Это было небольшое вступление, идем дальше.
ABB RobotStudio, FlexPendant, IRC5

Для программирования роботов компании ABB используется их фирменное программное обеспечение RobotStudio. Программа платная и стоит целых 1500$/год за стандартный комплект. За каждое дополнение придется доплачивать отдельно, хотя стоит сказать, что ABB иногда проводят акции или предоставляют своим клиентам специальные предложения.
Но есть и хорошая новость, — это пробный период. Пробный период доступен всего 30 дней, после чего основной функционал RobotStudio будет заблокирован. Стоить еще сказать, что переустановка RobotStudio или установка на виртуальную машину не поможет, в этом случае «программа» не даст возможности выбрать пробную версию.
Любой робот ABB это просто корпус, сервомоторы и датчики (грубо говоря) и нуждается в том, чтобы им кто-то управлял. В этом случае нас спасает контроллер компании ABB — IRC5.

В комплекте с контроллером поставляется пульт управления роботом ABB FlexPendant. Он напрямую подключается к контроллерам (например IRC5). Точно такой же пульт в виде симуляции можно использовать в RobotStudio. Программу для роботов можно писать в RobotStudio (через RAPID редактор) или через FlexPendant. В этой статье рассмотрим именно базу для FlexPendant.

Создаем робота в RobotStudio
Итак, про RobotStudio поговорили, про IRC5 поговорили, о FlexPendant узнали. Теперь мы переходим к практике. Запускаем RobotStudio:
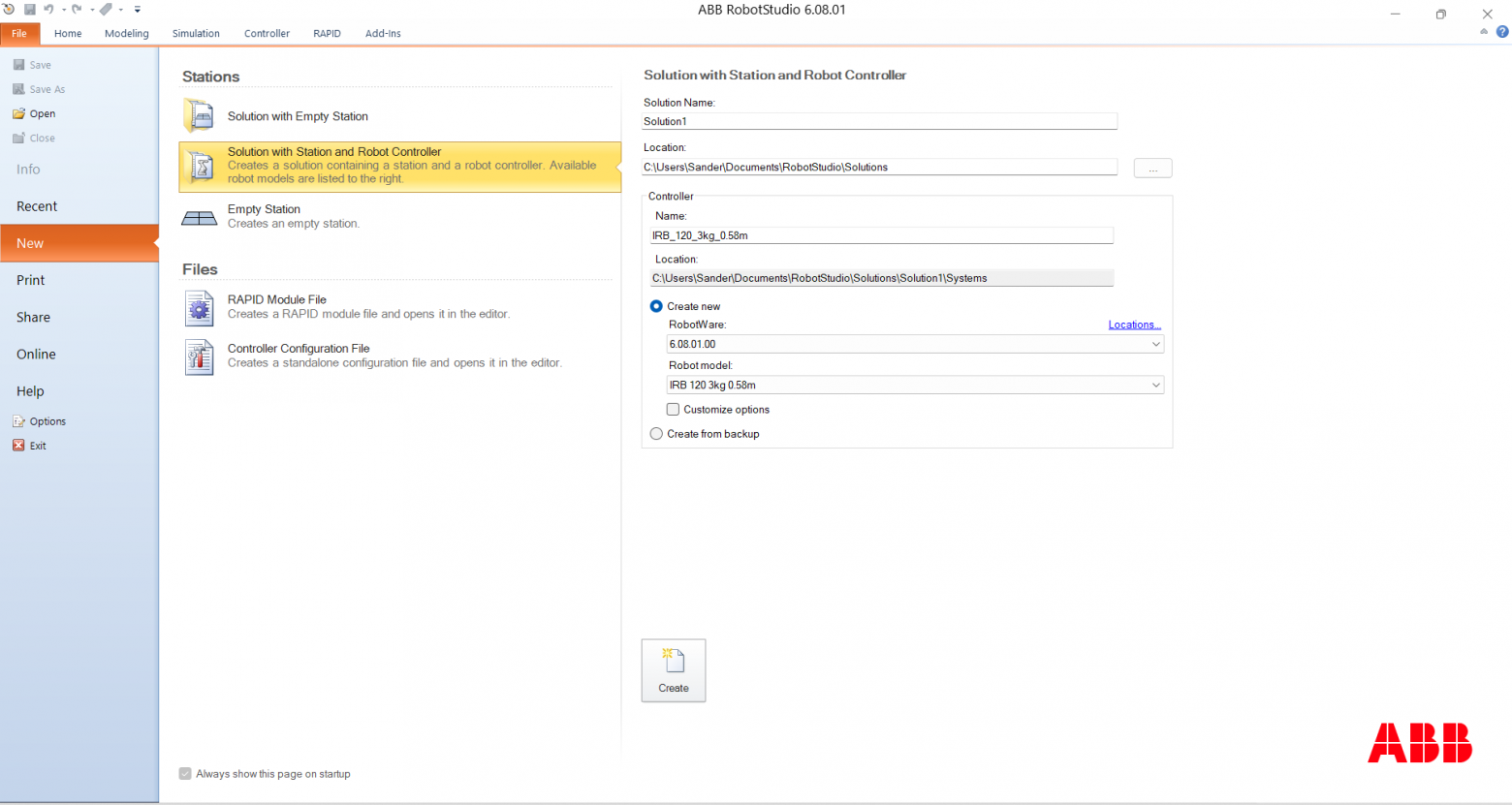
Выбираем Solution with Station and Robot Controller (создать робота, со станцией управления и контроллером). Заполняем необходимые поля, задаем имя для нашего проекта.
Обратите внимание, чтобы в Location не было слишком длинного пути до файлов, иначе RobotStudio не даст создать проект и будет показывать ошибки
Далее переходим к первым настройкам самого робота: RobotWare я выберу 6 версию (RobotWare — ОС для контроллера IRC5). В Robot model выбираем необходимого нам робота и оставляем пустым Customize options, так как дополнительные настройки нам пока не нужны.
Может случиться, что нужно будет установить RobotWare необходимой версии вручную (хотя как правило в новых версиях RobotStudio он уже предустановлен). Добавить необходимую версию RobotWare можно перейдя во вкладку Add-ins и найти в галерее RobotWare, затем выбираем необходимую версию и нажимаем Add

При выборе разных версий (например 7) некоторые роботы пропадут из списка доступных. Это связанно с тем, что не все роботы поддерживают более новый RobotWare. В реальности ABB создает поддержку для новых версий, однако в RobotStudio не успевает быстро появится поддержка
После создания проекта программа может попросить нас выбрать более точную модель робота. Чтобы понять какой робот нам необходим нужно залезть в каталог роботов ABB и посмотреть на техническую документацию.
Робот создан! В данной статьи я не буду рассказывать подробно как ориентироваться в интерфейсе. Можно посмотреть это видео, где показывается как управлять роботом.
Запускаем FlexPendant и управление через пульт
Итак. В RobotStudio мы выбираем вкладку Controller и ищем FlexPendant с изображением нашего пульта. После этого выбираем Virtual FlexPendant.

После чего перед вами в виде отдельного окна появится симуляция пульта FlexPendant, это окно независимо от RobotStudio и можно например переместить на второй монитор, чтобы на первом видеть RobotStudio.
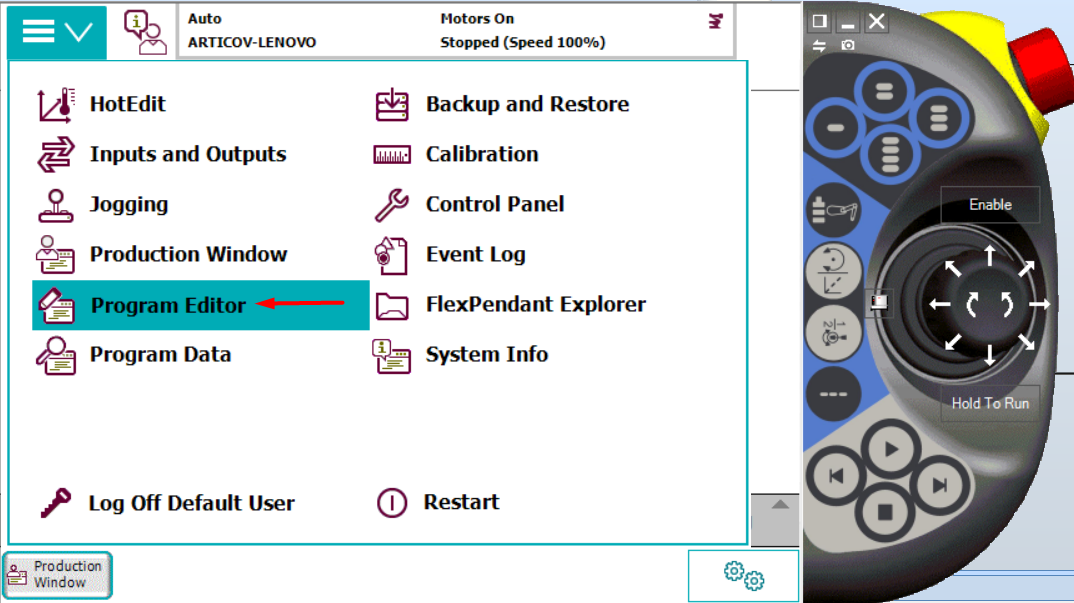
Давайте подвигаем нашего робота. Для этого необходимо в Flexpendant открыть меню (левый верхний угол) и выбрать страницу Jogging.

Перед нами откроется страница для управления режимами, выбором степенями свободы робота и другой информации: нагрузка, рабочий объект, инструмент.
Окно Position показывает нам каждое звено и под каким углом оно в данный момент находится (0 — null позиция, она необходима для калибровки).
Окно Joystick directions показывает нам как нужно сам боковой джойстик повернуть чтобы задействовать необходимое нам звено.
Если мы сейчас попробуем подвигать нашего робота, то у нас ничего не получится. А все потому что, так как этот пульт в точности копирует настоящий нам необходимо переключиться на «ручной режим» управления. Для этого необходимо возле самого джойстика найти маленькое изображение контроллера IRC5 и нажать на него. После чего необходимо выбрать среднее положение «ключа».

Теперь необходимо включить сами сервомоторы. Для этого нажимаем на Enable и Hold To Run. Теперь попробуйте подвигать джойстиком и посмотрите как начинает себя вести робот.

Кликнув на Motion mode: Axis 1 — 3. мы можем выбрать какими степенями свободы мы хотим управлять. Кликнув на ROB_1 (это идентификатор нашего робота в RobotWare) мы можем открыть дополнительное окно настроек нашего робота. Тамже можно настраивать скорость движения, углы, возрастающую скорость и многое другое.


Выбрав самое верхнее изображение нашего робота мы увидим тот же самый Motion mode однако в добавок у нас будет возможность выбора системы координат и рабочего инструмента.

Создаем программу для ABB робота с помощью FlexPendant
Давайте в завершении создадим простую программу с 2 точками.
- Запустить RobotStudio ✔
- Создать робота ✔
- Запустить FlexPendant ✔
- Открыть редактор программы
- Создать программу
- Обучить робота точкам
Точки — это наши пункты в разных системах координат для нашего робота. С помощью указаний этих пунктов и вида движения мы задаем роботу жесткий сценарий по которому он будет следовать. Например следовать дугой от точки А к точки Б, или следовать к точки А остановиться в точки Б и повернуть обратно.
Давайте перейдем к практике:
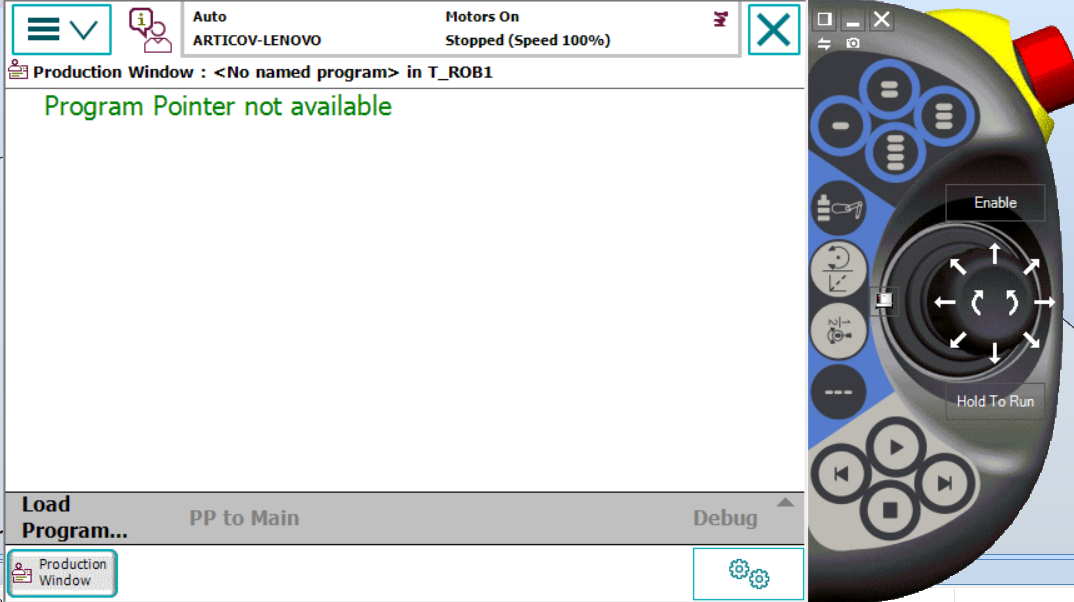
Находим в меню Program Editor. Именно там мы будем создавать нашу программу.

Если программы до этого не было, то пульт предложит создать новую программу с нуля. Мы соглашаемся с этим и попадаем в редактор. Если вы видите следующий код, то все сделано было правильно.
Ниже код представлен на языке программирования RAPID.
MODULE MainModule PROC main() ENDPROC ENDMODULE
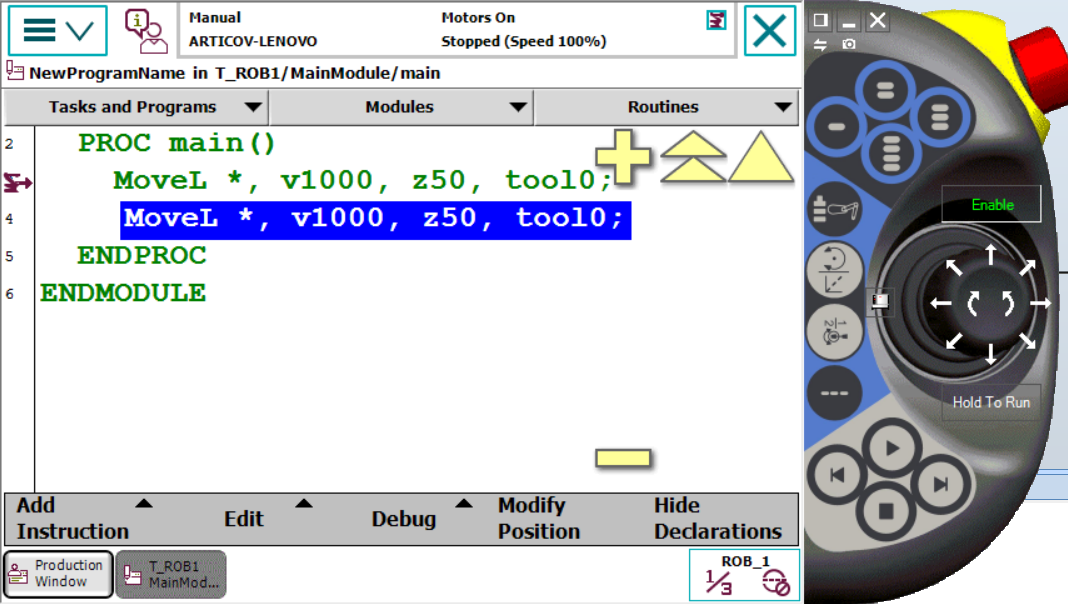
ВАЖНО: Чтобы начать создавать программу пульт должен быть переведен в «ручной режим» работы и при необходимости должны быть включены моторы для передвижения робота
Теперь нам необходимо создать для робота первую точку. Пусть это будет его текущая позиция и назовем её «домашней». Для этого прожимаем на Add Instruction и сбоку появится окно с командами, где мы должны выбрать какую инструкцию добавить. Я добавлю MoveL. MoveL — это прямолинейное движение.
Это значит, что робот к ЭТОЙ точке будет двигаться с помощью команды прямолинейного движения MoveL и никак иначе.
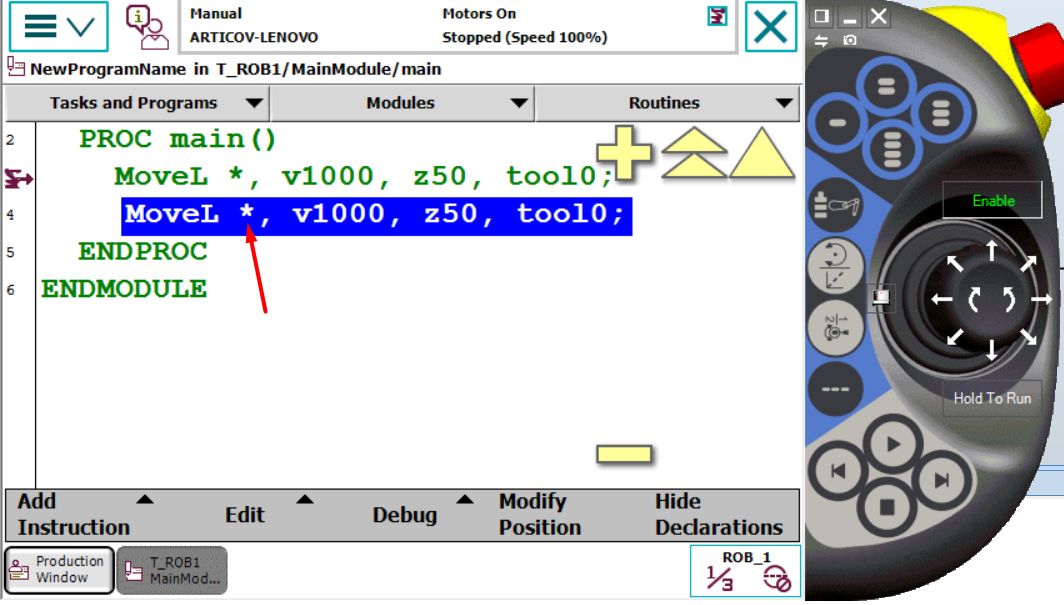
После того как создана первая точка необходимо создать еще одну. Попробуйте подвигать робота с помощью FlexPendant и задайте с помощью инструкции MoveL вторую точку.

Итак. Две точки созданы и при необходимости эти инструкции можно дополнительно настроить. Нужно кликнуть по символу звездочки и мы попадем в настройки нашей инструкции
В меню настроек инструкции мы можем добавить «особое имя» для нашей точки, для этого во вкладке Data выбираем функцию new и после чего указываем имя для нашей точки
Советую всегда указывать имя для точек, ибо по дефолту пульт задает им значение Target_N или P_N (где N — номер точки) и потом очень трудно определить какая именно это точка и куда она ведет.

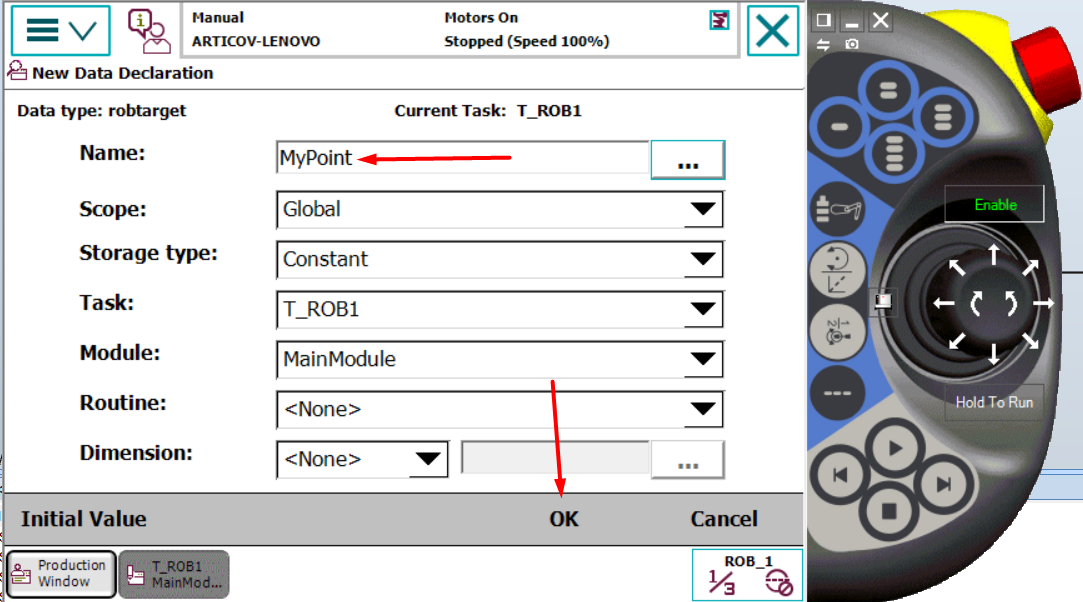

Обратите внимание, что имя должно быть уникальным и больше нигде не повторяться.
Помимо имени точки мы еще можем управлять такими настройками как скорость движения до точки (v1000), разрешение погрешность от точки (z50) и какой рабочий инструмент будет использоваться (tool0). Чтобы изменить эти параметры необходимо на них кликнуть и выбрать новые.
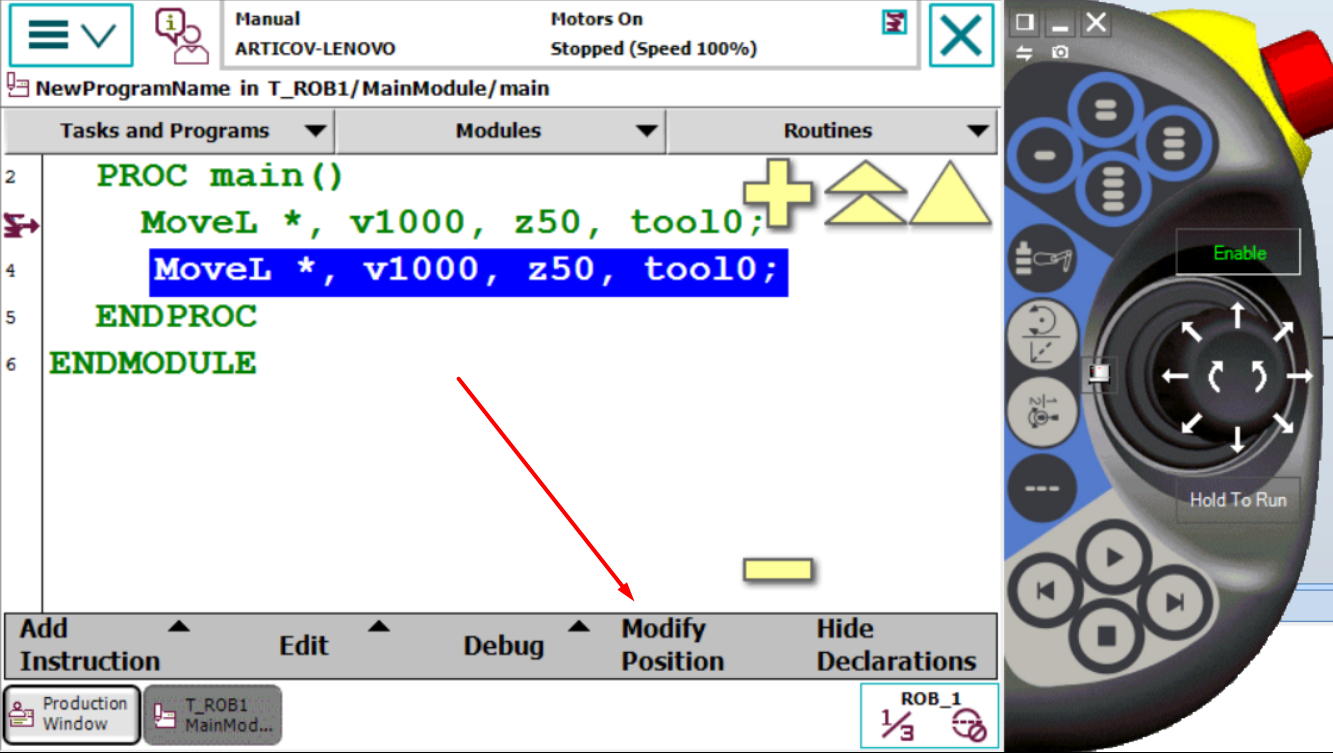
Изменение положения точки
С помощью функции Modify position мы можем изменить положение уже созданной точки. Например создав точку Target_10 мы поняли, что она должна быть на 1 сантиметр левее, то мы сначала двигаем робота левее куда нам необходимо и после чего используем Modify position
Запускаем программу в FlexPendant
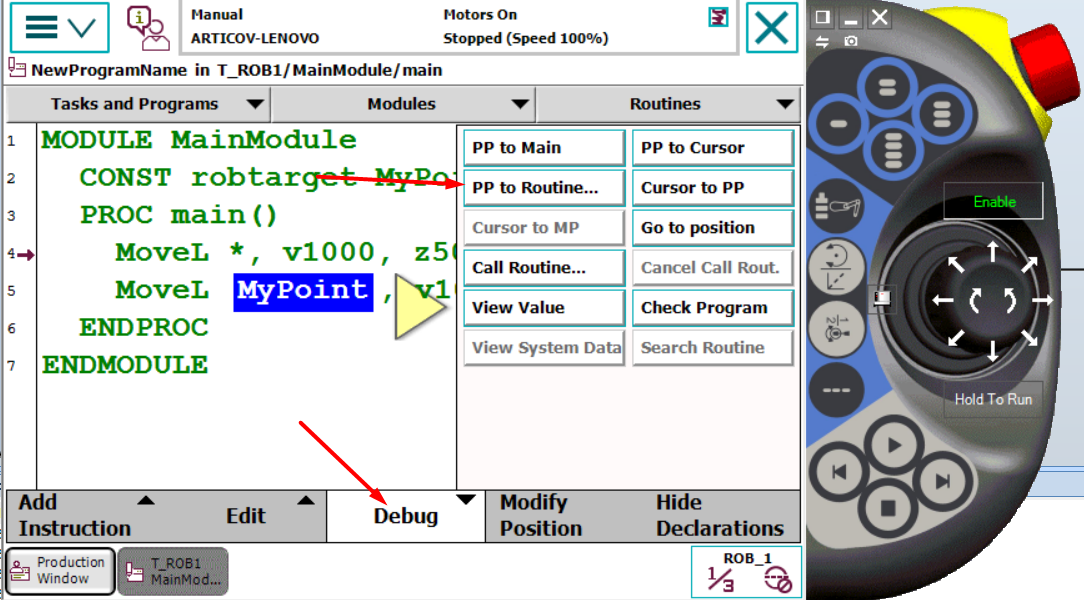
Наша простая программа создана и теперь мы хотим проверить как она работает. Для этого мы будем использовать встроенный дебагер. Нажав на кнопку Debug нам открывается меню выбора дебага. Что есть что:
- PP to Main -робот будет выполнять программу от самого начала до самого конца. Весь MODULE
- PP to Routine — робот будет выполнять программу только в определенной области PROC #имя
- PP to Cursor — робот будет выполнять команду, на которую указывает стрелка возле номера строки
Остальные функции я не так часто использую, но все же расскажу о них:
Curstor to PP — переводим стрелку на нужную нам строку
Go to position — робот будет двигаться на определенную позицию (точку)
Check Programm — пульт проверит нашу программу
Call Routine — вызвать PROC
View Value — посмотреть данные (переменные, сигналы и т.д.)
Программирование контроллеров ABB
Сейчас занимаюсь программированием контроллеров фирмы ABB серии AC700F.
Вообще, у ABB несколько линеек контроллеров. Из тех, о которых я слышал или видел это AC500, AC700, 800xA. Но мне досталась серия AC700.
На самом деле, впервые я столкнулся с этими контроллерами ещё 4 года назад. А сейчас проект 4-хлетней давности получил развитие, и я продолжил работу с ним в сторону расширения.
Но вернемся к теме программирования контроллеров ABB.
Контроллеры 700-й,800-й, 900-й серий программируются софтом, имеющим название ABB Freelance 2000. Хотя это уже устаревшее название. На сегодня выпущена версия ABB Freelance 2016 SP1.
Этот софт имеет в своем составе несколько инструментов. В первую очередь, это среда разработки, и она же инструментальная система, Control Builder F и среда визуализации, т.е. по сути SCADA, – DigiVis. Кроме того в этот набор включен ABB OPC-Tunnel, средство разграничения доступа SecurityLock, сервер трендов TrendServer и средство CBF-Viewer.
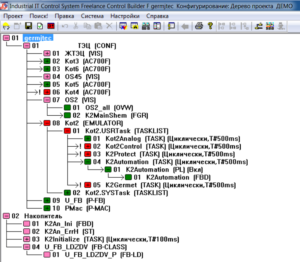
Вся разработка происходит в среде Control Builder F. Здесь конфигурируется железо, сеть, создаются и конфигурируются операторские станции, процессовые станции (т.е.контроллеры со своими входами/выходами), пишутся функциональные блоки, программмы, рисуются мнемосхемы и.т.д. И это мне очень понравилось.
Среда поддерживает разработку на всех 5 языках МЭК 61131-3: IL, LD, ST, FB и SFC.
Интерфейс программы, конечно, оставляет желать лучшего. Но это разработка фактически начала 2000-х, поэтому можно на это сделать скидку. Хотя, нехватка некоторых элементарных на сегодня возможностей, иногда буквально бесит.
Например, в языке LD все соединения между контактами, катушками и блоками нужно буквально рисовать руками, т.е. мышкой проводить между ними соединения. Нет никакой автопривязки к точкам возможного подключения и т.д.
Тоже самое и в языке FB.
В языке ST нет никакого интеллектуального ввода. Есть только возможность вставить стандартные конструкции языка.
Но что-то я увлекся перечислением недостатков.
Поговорим вообще о последовательности программирования контроллера. И даже не о последовательности программирования контроллера, а вообще о создании АСУ ТП в среде ControlBuilderF.
На самом деле, учитывая, что все находится в одном месте (в одной среде), сразу появляются большие плюсы при разработке:
- база переменных одна,
- база тэгов одна (тэги и переменные для ControlBuilderF – это разные вещи),
- не нужно промежуточных инструментов для привязки тэгов и переменных в графической среде,
- все работает согласованно
- и т.д.
Последовательность шагов, необходимая для начала разработки более-менее стандартная.
В первую очередь нам нужно сконфигурировать железо в специальном разделе конфигурирования аппаратных средств. Здесь добавляются контроллеры с модулями ввода/вывода, операторские станции, шлюзовые станции и т.д.
Затем, там же конфигурируется сеть.
Все это сохраняется.
Следующим шагом будет создание в дереве проекта ресурсов. Как минимум, это будет так называемая процессовая станции. По сути, это программная часть контроллера.
Если есть операторская станция, то ее тоже нужно создать в дереве проекта. Здесь будут расположены ваши мнемосхемы, тренды, журналы аварий и событий и т.п.
Затем, железную часть проекта нужно связать с программной. Это делается в разделе конфигурирования аппаратных средств путем назначения аппаратным ресурсам программных.
Когда все это подготовлено, увязано и проверено – можно приступать к разработке программной и визуальной части.
Но об этом – в следующей статье.
Эту же статью я хочу закончить видео, в котором я показал все вышеперечисленные шаги. Все-таки, как говориться, лучше один раз увидеть…
Комментируйте, делитесь с друзьями.
Источник: asutpby.ru