
В качестве основных языков программирования используются:
STL — низкоуровневый язык, применяемый для реализации особо критичных по времени модулей проекта. Характеризуется высоким временем разработки и углубленным знанием структуры контроллеров семейства SIMATIC S7; широко используется при оптимизации.
LAD, FBD — визуальные языки проектирования, часто использующиеся для реализации алгоритмов управления. Их отличает наглядность и сравнительная легкость применения персоналом, не знакомым со STEP7 и спецификой программирования контроллеров SIMATIC S7; таким образом, изменения в алгоритмы могут непосредственно вносить инженеры, технологи конкретного предприятия.
SCL — высокоуровневый Pascal-образный язык, наиболее широко применяющийся в настоящее время для разработки проектов. Сокращает время разработки, удобен как для реализации алгоритмов, так и сложных математических вычислений.
SFC, CFC — визуальные языки проектирования; используются при разработке проекта с помощью пакета PCS7. В алгоритме, реализованном на данных языках, без труда можно использовать блоки, написанные, например, на языках STL или SCL.
Подключение к SIMATIC S7-200 с помощью преобразователя USB/RS485 Овен АС4
При разработке новых проектов широко используются существующие наработки, реализованные в виде готовых к применению модулей, включающих, но не ограничивающихся, блоками:
управления разнообразным технологическим оборудованием (насосами, клапанами, задвижками;
сбора, обработки и качественной оценки измерительных данных;
контроля параметров технологического процесса, при необходимости с выдачей сообщений и сигнализации;
самодиагностики самого контроллера SIMATIC и отдельных каналов;
организации интерфейса со средствами отображения (Protool, WinCC);
сетевого взаимодействия и передачи информации; Наличие широко спектра готовых решений в виде уже отлаженных функций, а также использование стандартной библиотеки S7, содержащей большое количество часто использующихся функций (в частности, ПИД-регулирования), облегчает процесс разработки и тестирования, сокращает общее время создания и пуско-наладки проекта.
Программа состоит из отдельных элементов LAD, соединенных последовательно или параллельно один по отношению к другому. Контактная схема подобна электрической цепи. Программирование контактного плана (current path) или звена (rung) начинается на левой несущей или левой питающей шине (power rail).
Надо выбрать место в звене, куда следует вставить элемент, затем выбирается требуемый программный элемент при помощи нажатия соответствующей функциональной клавиши (например, клавиша F2 используется для нормально разомкнутого (normally open — NO) контакта), при помощи нажатия соответствующей кнопки на функциональной линейке, из каталога программных элементов (пункт меню Insert > Program Elements or View > Catalog (Вставка > Программный элемент или вид > Каталог)). Завершается звено катушкой (coil) или прямоугольным блочным элементом (box). Большинству программных элементов должны быть назначены ячейки памяти (переменные). Самый простой способ сделать это — сначала выстроить все программные элементы, затем назначить им метки (label).
Видео SIMATIC S7-200 часть №1
Бинарные адреса, такие как входы (inputs), сканируются с использованием контактов. Сканируемые сигнальные состояния комбинируются в соответствии с компоновкой контактов в последовательной или параллельной топологии. «Ток течет» через нормально разомкнутый контакт (normally open contact), если сканируемый бинарный адрес имеет сигнальное состояние «1» (контакт активирован); «ток течет» через нормально разомкнутый контакт (normally closed contact), если сканируемый бинарный адрес имеет сигнальное состояние «0» (контакт не активирован). Кроме того, вы можете сканировать биты состояния (слово статуса) или инвертировать результат логической операции (контакт NOT (НЕ)).
Катушки используются для управления бинарными адресами, такими как выходы (outputs). Простая катушка устанавливает бинарный адрес, когда в катушке течет ток, и сбрасывает его при отключении тока.
Программирование кодовых блоковИмеются катушки с дополнительными метками, например, катушки установки (Set coil) и сброса (Reset coil), которые выполняют специальные функции. Катушки так-же применяются для управления таймерами и счетчиками, вызова блоков без параметров, выполнения переходов в программе и так далее.
Прямоугольные блочные элементы (Boxes)
Прямоугольные блочные элементы представляют элементы LAD со сложными функциями. STEP 7 предоставляет «стандартные блочные элементы» двух различных типов:
без механизма EN/ENO, например, функции работы с памятью, функции таймера и счетчика, блочные элементы с функцией сравнения;
с EN/ENO, например, MOVE (Переместить), арифметические и математические функции, преобразование типов данных.
Когда вы вызываете кодовые блоки (блоки FC, FB, SFC и SFB), LAD представляет вызовы также в виде блочных элементов с EN/ENO. Кроме того, LAD предоставляет «пустой блочный элемент» (Empty box), в который при программировании можно ввести требуемую функцию.
Редактор LAD определяет сегмент в соответствии с принципом «главного звена». Это самая верхняя ветвь, которая начинается непосредственно на левой несущей (питающей шине) и должна завершаться катушкой или блочным элементом. В этомзвене могут быть расположены все элементы LAD.
В параллельных ветвях, которые не берут начало на левой несущей (питающей шине), иногда действуют ограничения в зависимости от тех или иных программных элементов. Дополнительные ограничения определяют следующее: элемент LAD не может быть «замкнут накоротко» с «пустой» параллельной ветвью, и «ток» не может протекать через элемент справа налево (параллельная ветвь должна быть замкнута на ветвь, в которой она была разомкнута). Все остальные правила, применяемые к компоновке особых элементов LAD, обсуждаются в соответствующих главах. При использовании блочных элементов в качестве программных элементов можно: программировать единственный в сегменте блочный элемент;
скомпоновать блочные элементы в Т-ветви в ветвях, которые начинаются на левой несущей (питающей шине);
сгруппировать блочные элементы в последовательности путем подключения выхода ENO блочного элемента к входу EN следующего блочного элемента;
включить блочные элементы параллельно в ветвях на левой несущей (питающей шине) посредством выхода ENO.
С помощью компоновки блочных элементов вы можете определять сигнальные состояния выходов ENO: если выходы ENO закрываете (заделываете) катушкой, то «ток» течет в катушке при условии, что все блочные элементы сработали без ошибок в последовательном соединении, или один из блочных элементов закончил обработку без ошибок в случае параллельного соединения.
Рассмотрим методику создания прикладной программы пользователя для созданной системы управления на базе контроллера серии серии S7-200 и текстовый дисплей TD — 200.
В качестве примера рассмотрим последовательность создания программы, в ходе выполнения которой робототехнический комплекс «Ритм — 01» выполняется следующий набор действий:
— по нажатии клавиши F1 на текстовом дисплее, РТК «Ритм — 01» поднимается вверх;
— нижняя рука робота выдвигается в перед;
— поворот захвата кисти нижней руки робота по часовой стрелке;
— сжатие захвата нижней руки;
— поворот захвата нижней руки робота против часовой стрелки;
— поворот РТК «Ритм — 01» против часовой стрелки (вправо);
— опускание РТК «Ритм — 01» вниз;
— разжатие захвата нижней руки;
— нижняя рука робота задвигается назад;
— поворот РТК «Ритм — 01» по часовой стрелке (влево);
Дополнительно поставим следующие требования к программе: по нажатию клавиши F2 на текстовом дисплее TD — 200 необходимо остановить выполнение программ. Для дальнейшего перевода робота в исходное положение необходимо нажать клавишу F3.
Для дальнейшего решения необходимы данные об исходном положении РТК «Ритм — 01» и соответствие выхода Qij контроллера и выполняемые роботом действия.
Итак РТК «Ритм — 01» занимает следующее исходное положение:
— РТК «Ритм — 01» в нижнем положении (опущен);
— РТК «Ритм — 01» повернут влево
— руки (верхняя и нижняя) задвинуты назад;
— захваты рук робота разжаты;
Для написания прикладной программы пользователя составим ее блок — схему алгоритма по сформулированному выше условию.
Согласно блок-схеме алгоритма программы сначала проверяется нажатие клавиши F1 текстового дисплея TD — 200.
Если клавиша не нажата, то система остается в режиме ожидания. При условии нажатия клавиши F1 последовательно выполняются команды, реализующие заданную последовательность действий. В БСА программы присутствуют блоки задержки времени. Наличие блоков задержки обусловлено конечной длительностью технологической операции, (например, подъем, поворот РТК «Ритм — 01» и т.д. выполняемой РТК «Ритм — 01» ).
В ходе выполнения указанной последовательности действий, программа должна также постоянно контролировать нажатие клавиши F2 — клавиша остановки программы. Если клавиша F2 не нажата, то программой выполняются данные, если нажата — то робот останавливается в предыдущем положении и остается не подвижным.
Как видно из БСА, для перевода РТК «Ритм — 01» в исходное положение следует нажать клавишу F3 на текстовом дисплее TD — 200.
В соответствии с БСА программы, теперь можем разработать прикладную программу пользователя.
Разрабатываем программу в среде Step 7 MicroWin (программное обеспечение фирмы SIEMENS позволяющее программировать контроллеры фирмы SIEMENS серии S7 — 200).
Для программирования текстового дисплея используется утилита TD — 200 Designer.
Листинг разработанной программы приведен в ПРИЛОЖЕНИИ (Ж)
Работа программы заключается в следующем.
Программа проверяет какие клавиши на текстовом дисплее нажаты. Если нажата клавиша F1, то программа выполняет действия, приведенные в условии примера на БСА программы.
Если нажата клавиша F2, то происходит остановка робота, а на выходы Q контроллера подаются сигналы низкого логического уровня (уровень «логический ноль»).
Если после этого нажать клавишу F3, то РТК «Ритм — 01» перейдет в исходное положение.
Из особенностей программы опишем порядок формирования сигнала для выполнения определенной технологической операции. Изначально формируем «управляющее слово» (кодовую комбинацию, определяющую, на какой выход Q контроллера подается сигнал логической «1») и записываем его в ячейку памяти MW. Далее в программе считываем это слово и подаем каждый его бит на определенный соответствующий выход контроллера. Для выполнения следующего действия, формируем соответствующие «управляющее слово» и при помощи подпрограммы на выбранные выходы Q контроллера сигналы высокого уровня (сигналы логической «1»). Дальнейшие действия аналогичны.
Таким образом, сформировав «управляющее слово» и выдав его на выходы контроллера, представляется возможность программно управлять работой пневмораспределителей, а значит и работой РТК «Ритм — 01» в целом.
Источник: studentopedia.ru
Simatic S7-200 быстрый старт. Часть 2.
В этой статье рассмотрим основные операции выполняемые над входами выходами и аналоговыми данными. Рассмотрим конфигурирование и использование таймеров и счетчиков, а также создание и работу с функциями.
Коротко пробежим по основным операциям.
Логические операции. Доступны через вкладку Bit Logic
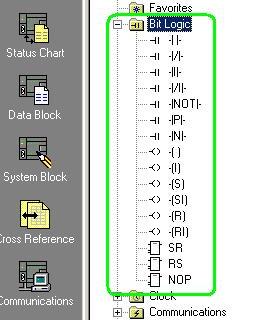
Что мы здесь видим. Нормально разомкнутый контакт -| |-. Мы его уже применяли. Он пропустит на свой выход сигнал если его состояние равно логической «1». Нормально замкнутый контакт -| |-. Он пропустит на выход сигнал если его состояние равно логическому «0».
Сигнал инверсии –| NOT |- инвертирует входной сигнал. Сигнал выделения фронта -| P |- формирует на своем выходе импульс в течении одного цикла программы при обнаружении на своем входе положительного фронта. –( )- сигнал установки бита. Приравнивает бит или группу битов логическому состоянию на входе. –( S )- устанавливает бит или группу битов при появлении логической 1 на входе. –( R )- сбрасывает бит или группу битов при появлении на входе логической единицы. Всякие триггеры и так далее.
Создание ветвлений в программе осуществляется стрелками
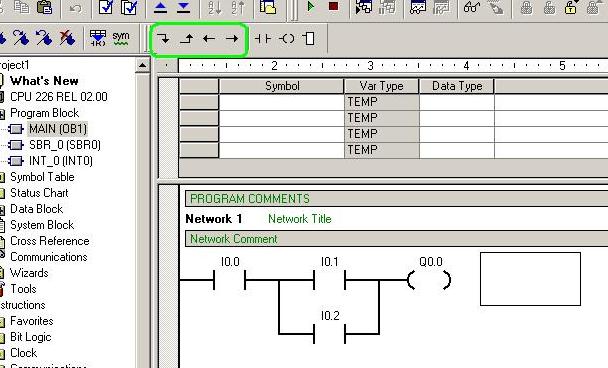
На рисунке показано как реализовать комбинированную логическую схему. Входа I0.1и I0.2 объединены по ИЛИ и вместе они объединены по И с входом I0.0.
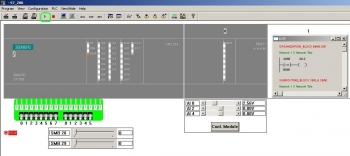
Операции сравнения – Compare. Используются понятное дело для сравнения различных аналоговых величин. На выходе формируют логический сигнал соответствующий результату сравнения. Например
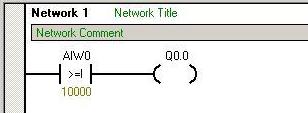
Сделайте такую схему и экспортируйте ее в awl файл. Запустите симулятор S7-200 от canal. Два раза щелкните по полю с надпись 0. Откроется окно в котором выберем модуль EM 231
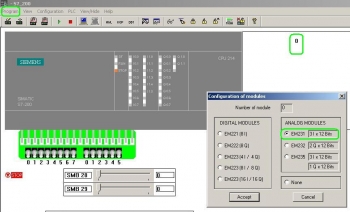
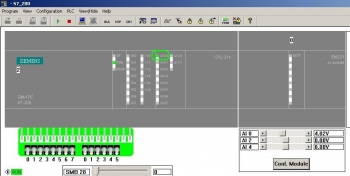
Теперь у нас есть аналоговый модуль с входами AIW0 AIW1 AIW2. Нажимаем Program -> load program и загружаем наш файл awl. Откроется окно
Нажимаем RUN. И теперь двигая ползунок аналогового входа AI0 видим что при превышении значения 10000 устанавливается выход Q0.0.
Еще одна тонкость – полезность. В симуляторе и при работе с реальным ПЛК доступен режим state program (состояние программы).
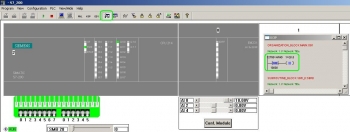
При нажатии на эту кнопку в редакторе кода будет отображаться состояние булевых переменных, входов выходов, аналоговые значения и результат логической операции.
При результате логической операции равной 1 – сама операция подсвечивается синим цветом. Видно что аналоговое значение 32760 это больше 10000 следовательно результат операции сравнения = логической 1. Значение выхода Q0.0 тоже становиться равным 0.
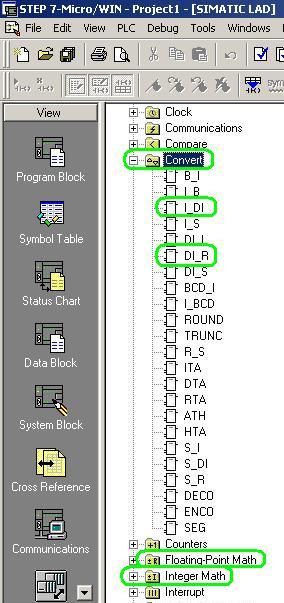
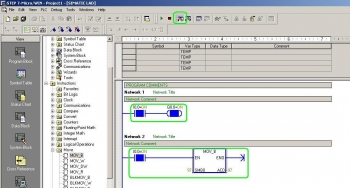
Математические операции делятся на математику целочисленную Integer Math и математику с плавающей запятой Floating Point Math. Тут важно заметить что нельзя напрямую величины типа integer 16 бит и аналоговые входа с размерностью WORD 16 бит засовывать в математику типа REAL. Необходимо преобразовать сначала Integer в Double Integer а затем DI в REAL. Функции преобразования лежат во вкладке convert.
Для примера напишем программу которая считывает аналоговый вход и делит его на 2,5.
Вот как будет выглядеть программа
Вот опять используем системный меркер SM0.0 и используем аккумулятор АС0 для хранения промежуточных результатов.
Таймеры
Есть несколько видов таймеров. TON – с задержкой включения. Когда на его входе появляется логическая 1 то таймер начинает считать до заданного значения по достижении которого он выставляет бит своего состояния в логическую единицу.
TOF – таймер с задержкой выключения. Бит состояния выставляется в 1 сразу по появлению на входе логической 1 и сбрасывается по достижению таймером заданного значения.
Таймеры в S7-200 делятся по дискретности устанавливаемого времени. Так таймеры с номерами T32, T96 имеют дискретность 1 мс и максимальное время 32.767 с.
Таймеры с номерами T33-T36, T97-T100 имеют дискретность 10 мс и максимальное время 327.67 секунды.
Таймеры с номерами T37-T63, T101-T255 имеют дискретность 100 мс и максимальное время 3276.7 секунды.
Для настройки таймера необходимо выбрать его номер из группы с необходимой дискретностью и задать значение до которого считать (максимум 32767).
На рисунке приведен пример мигалки на двух таймерах
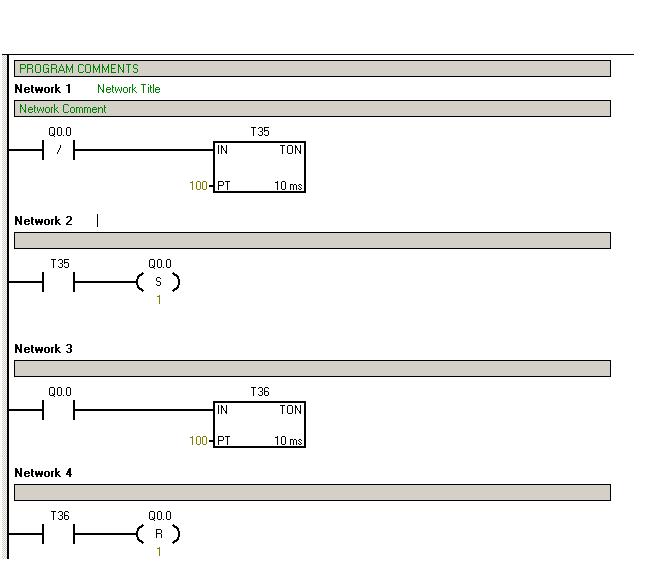
Логика работы такая. Так как логическое состояние таймера при первом старте равно 0 то результат опроса команды -| / |- Q0.0 равно 1. Оно приводит к тому, что стартует таймер Т35. Как только таймер Т35 досчитал до 1 секунды то выставляется выход Q0.0 в 1. Это приводит к тому что стартует таймер Т36. Когда он досчитывает до 1 секунды то в сбрасывается Q0.0 и стартует таймер Т35 и так по кругу. Загрузите этот пример в симулятор и нажав state program посмотрите как это работает в железе.
Необходимо заметить, что можно опрашивать не только логическое состояние таймера но и его текущее значение. Важно помнить, что значение таймера имеет разрядность 16 бит и при сравнении используется целочисленная математика и сравнение Integer.
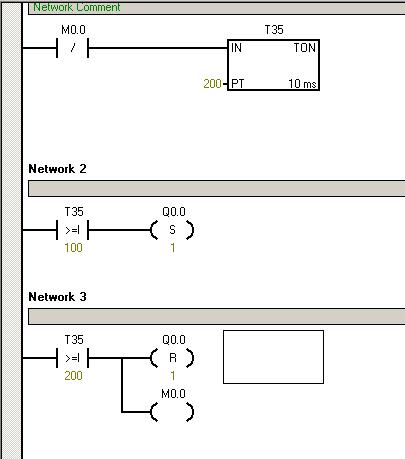
На рисунке пример программы реализующей мигалку на одном таймере. Логика работы такая. Так как в первый момент состояние меркера m0.0 равно 0 то результат опроса команды -| / |- M0.0 равно 1. Оно приводит к тому, что стартует таймер Т35. Как только таймер Т35 досчитал до 1 секунды то выставляется выход Q0.0 в 1. Как только таймер досчитал до 2 секунд, то сбрасывается выход Q0.0 в 0 и устанавливается на один цикл меркер m0.0. Установка меркера (результат опроса команды -| / |- М0.0 становиться равен 0) приводит к рестарту таймера Т35 и цикл повторяется.
Высокоскоростные счетчики
На практике часто необходимо осуществлять подсчет импульсов (например при измерении оборотов). Для этого в ПЛК S7-200 предусмотрены высокоскоростные 32-х разрядные счетчики HSC (High Speed Counter). В линейке S7-200 есть ПЛК имеющие от 4 до 6 скоростных счетчиков с максимальной частотой счета 30кГц и CPU 224XP имеющий к четырем 30кГц счетчикам еще два с максимальной частотой 200кГц. Аппаратно входы счетчиков подключены на ноги порта I0 (нужно смотреть в документации). Для конфигурации счетчиков я рекомендую использовать мастер.
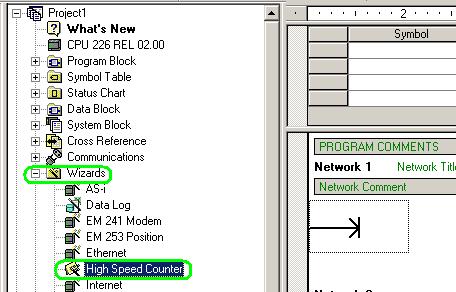
На примере рассмотрим как настроить счетчик на подсчет импульсов за определенное время (классическое измерение частоты). Запускаем мастер настройки счетчика.
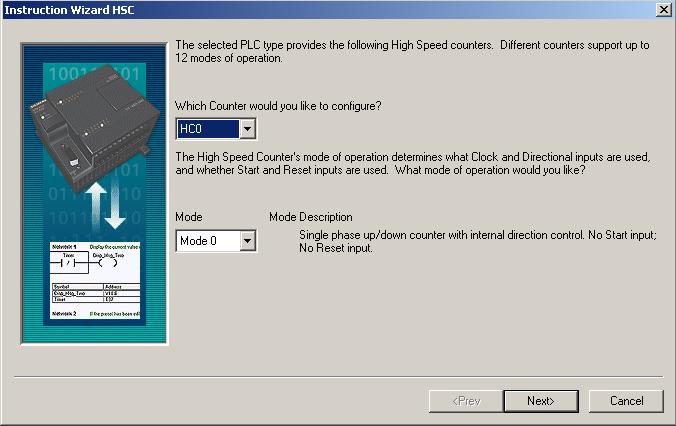
Выбираем какой счетчик настраиваем и режим работы (я использую режим Mode 0 – простой счет без сброса и старта). Mode 12 например используется ля генерации PWM сигнала (подробнее можно найти в Help). Нажимаем Next.
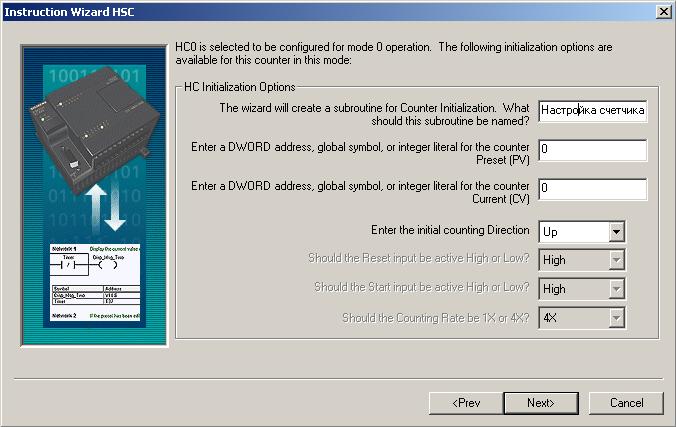
Даем название процедуре настройки счетчика (например «настройка счетчика импульсов»). Выбираем начальное значение, значение до которого считать и направление счета. В нашем случае выбираем Preset = 0, Current = 0, Direct = UP. Нажимаем Next.
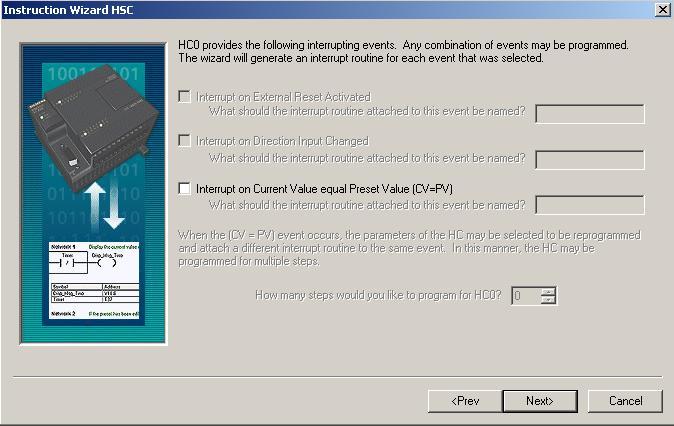
Здесь все оставляем без изменений так как мы считаем импульсы за период времени (если бы считали импульсы до определенного значения то в предыдущем окне установили бы Preset на необходимую величину и в текущем окне поставили бы галку «генерировать прерывание по достижению PV). Нажимаем Next и в следующем окне Finish.
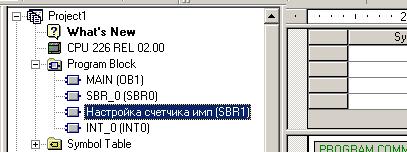
В окне Program Block появились две новые процедуры
Настройка счетчика импульсов SBR0 и процедура прерывания INT_0. В коде блока OB1 вставляем нормально разомкнутый контакт sm0.1 (First Scan) и из списка Call Soubrutines выбираем «Настройка счетчика импульсов SBR0».
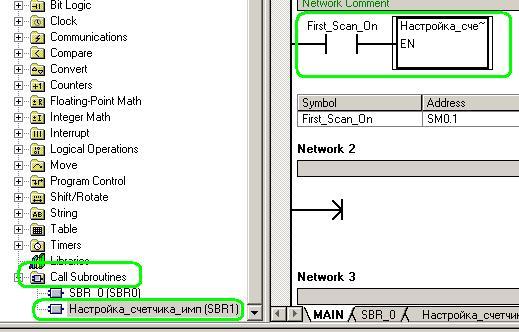
Теперь мы можем убедиться, что счетчик считает. Допишем в Network2 следующий код.
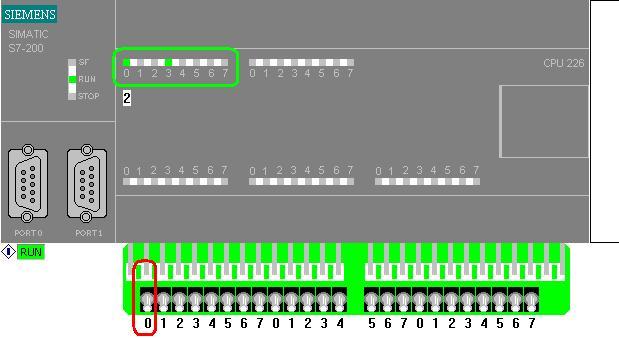
Делаем экспорт в awl. Открываем симулятор S7_200. Двойной щелчок по CPU и выбираем CPU 226. Загружаем наш awl файл и переводим ПЛК в RUN. Теперь если переключать тумблер I0.0 то счетчик будет считать и его значение будет отображаться на байте выходов Q0.
Теперь попишем программу для автоматического подсчета импульсов за период времени.
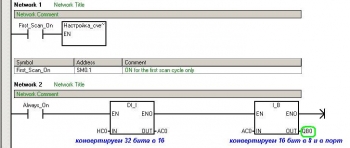
В настройках счетчика вставляем network и дописываем в него следующий код
Тут необходимо сделать следующие пояснения.
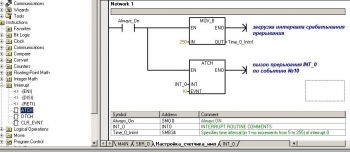
В системе есть специальный таймер тикающий с периодом равным 1мс*SMB34 и вызывающий так называемое событие №10. Функция ATCH из выпадающего списка Intertupt имеет следующие входа выхода. Вызываемое прерывание (в нашем случае INT_0) и вход номера события запускающее это прерывание (в нашем случае №10). Таким образом мы настроили вызов прерывания INT_0 каждые 250мс.
Теперь заходим в прерывание INT_0 и вставляем следующий код

Теперь в переменной VD0 мы имеем число импульсов измеренное за 250мс.
Работа с функциями
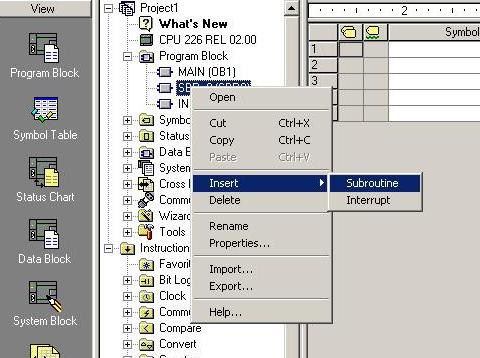
Часто целесообразно для выполнения типовых действий создать функцию. Делается это следующим образом. Правым щелчком мыши на поле Program block -> Insert -> Subroutine.
Появляется еще одна подпрограмма SBR1. Ее можно переименовать по клику правой кнопкой -> rename.
Теперь для ее вызова необходимо в нужном месте программы (например в основном цикле при включение входа i0.0 должна вызываться наша подпрограмма func_1 (имена могут быть и на русском языке)) необходимо встать на линию после опроса входа -| |- i0.0 и два раза щелкнуть по имени нашей подпрограммы в списке call subroutine. Функция автоматически встанет на место.
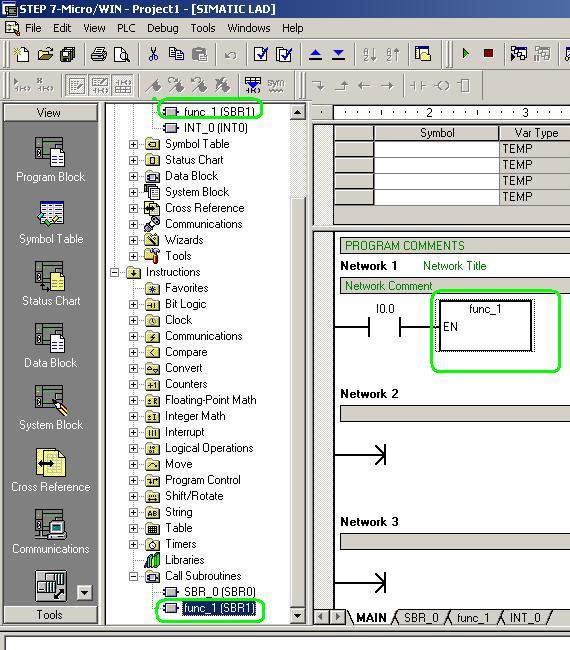
Теперь наша функция вызывается. Что бы изменить начинку функции необходимо кликнуть ее два раза в списке Program block.
Откроется окно аналогичное основному блоку, где можно написать свою программу. Например как на рисунке.
Это пример функции ни чего не возвращающей и не имеющей входных параметров. Этот прием используется в основном для структурирования программы путем разбития ее на отдельные сегменты. Часто на практике требуются функции обрабатывающие входной сигнал и возвращающие результат. Это делается следующим образом. Заходим в нашу функцию и вверху видим поля для данной функции.
In это входа Out выхода Temp внутренние переменные. В поле symbol пишем символьное имя входной переменной (например «вход 1»), в поле data type определяем какого типа будет эта переменная , если это аналоговый вход то тип word и так далее. Добавляем например «вход 2» типа word и выход «выход 1» типа BOOL.
Теперь пишем программу. Будем например сравнивать значение переменной вход 1 и вход 2 и если вход 1 больше то устанавливать выход в 1.
Вот как выглядит эта программа.
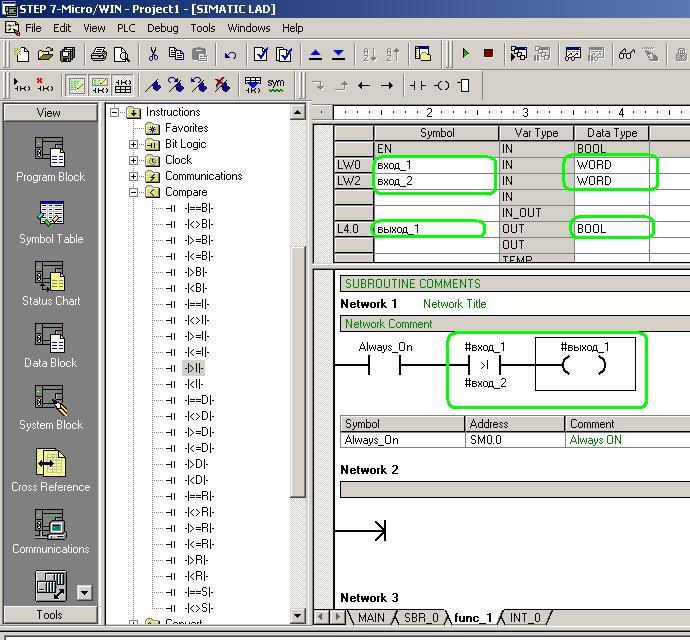
При заполнении символов в программе знак # писать не надо, он ставиться автоматически.
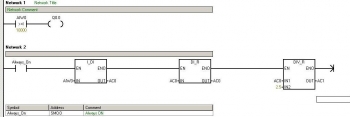
Теперь вызовем нашу функцию. В основном цикле после условия вызова (например sm0.0 вызывать всегда) выбираем нашу функцию func_1 из списка call subroutines.
Появляется наша подпрограмма в таком виде
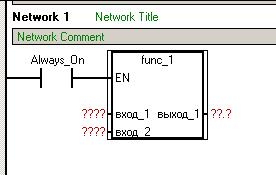
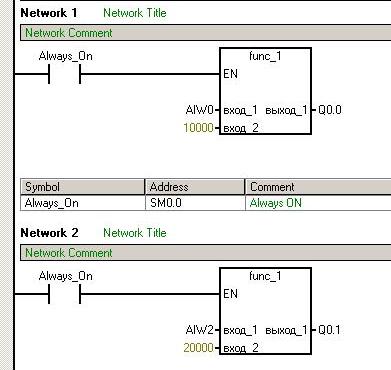
Заполняем знаки вопроса необходимыми нам переменными. Например в первом нетворке сравнивается значение аналогового входа AIW0 с уставкой 10000 и если вход больше то устанавливается выход q0.0. Во втором нетворке сравнивается значение аналогового входа AIW2 с уставкой 20000 и если вход больше то устанавливается выход q0.1.
Как верно замети Сергей в симуляторе от Canals этот пример не работает. Зато он нормально работает в симуляторе S7_200_SIM, просто замените AIW0 на IB0 и AIW2 на IB1, а впроцедуре тип WORD входных переменных на BYTE. В сравнении естественно нужно сравнивать не INT а BYTE. Можно загрузить готовый проект подрограмма.mwp. Естественно на практике внутри функции выполняется как правило больше действий.
Например я использую подобные функции чтобы получить значение давления в кгс с датчиков с токовым выходом 4-20мА. На вход передаю значение из аналогового модуля и величину давления соответствующего току 20мА для данного датчика. Внутри функции по формуле вычисляю давление соответствующее текущему току и возвращаю из функции.
Теперь о дополнительных тонкостях и хитростях.
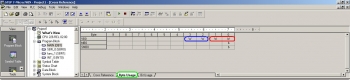
Например необходимо узнать где у нас используется та или иная переменная. Для это служит средство cross reference.
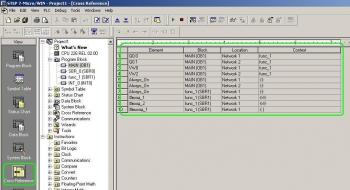
В таблице видно, что мы использовали слово памяти VW0 один раз в основном цикле OB1.
Системный меркер sm0.0 Always_On мы использовали три раза. Два раза в основном цикле OB1 и один раз в подпрограмме func_1. Если в этой таблице два раза щелкнуть по имени переменной то автоматически произойдет переход в то место программы где произошло использование этой переменной.
Допишем в программе OB1 код
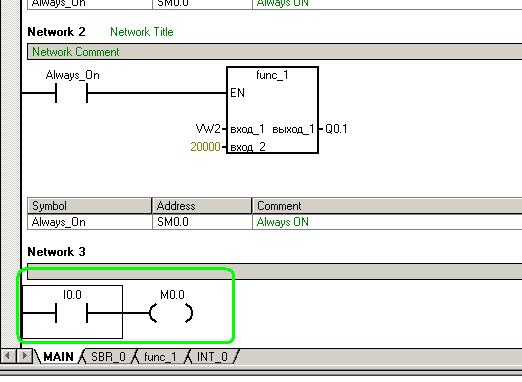
Нажимаем PLC -> compile All. Открываем опять cross reference.
Открываем вкладку Byte Usage
Здесь показано как у нас занята память. У нас занята память под VW0 и VW2, а так как они используют по два байта то отображаются буквами W, и занимают каждая по две клетки байтовой области. Меркер M0.0 занимает бит в байте MB0. Также мы используем специальный меркер sm0.0 Always_On из байта SMB0. Здесь удобно смотреть какие ячейки еще свободны что бы случайно не использовать уже занятый.
На вкладке Bit Usage уже показывается распределение занятых битов в байте.
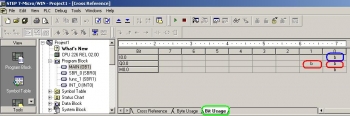
Здесь видно, что в программе мы уже использовали два дискретных выхода Q0.0 и Q0.1 и один дискретный вход I0.0. Эту табличку я смотрю когда необходимо заиметь свободный меркер типа BOOL для какого либо флага в программе и при необходимости узнать какие еще входа выхода свободны в контроллере.
Отладка программы
Для просмотра значений переменных и состояния входов выходов используется инструмент Chart Status
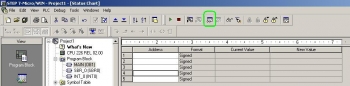
В таблице вбиваем нужные нам переменные и смотрим их значения. Можно задать свои значения в поле New Value и нажать карандашик Write All и эти значения передадутся в программу.
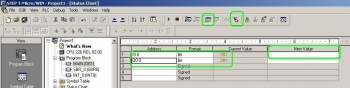
Состояние выполнения программы можно увидеть нажав кнопку program status (как в симуляторе) и при включенном ПЛК будут отображаться состояния входов выходов и текущие значения переменных
В следующей статье рассмотрим создание HMI интерфейса с контроллером SIMATIC S7-200 на базе панели оператора TD и на базе PC с помощью программы ProTool.
- S7200simRus_demo.rar (1180 Кб)
- подпрограмма.rar (2 Кб)
Теги:
 tvilsa
tvilsa  Опубликована: 29.01.2013
Опубликована: 29.01.2013  Изменена: 02.06.2013
Изменена: 02.06.2013  0
0 

Вознаградить Я собрал 0 1
Оценить статью
- Техническая грамотность
Источник: cxem.net