
CV AVR – хорошая интегрированная среда для написания программ на языке высокого уровня С для микроконтроллеров семейства AVR, АТ90, ATMEGA, АТХ MEGA. Большое спасибо разработчикам за хорошую программу, но есть в ней один существенный недостаток – это отсутствие поддержки контроллеров без оперативной памяти ОЗУ (RAM), а именно ATTINY11, ATTINY12, ATTINY15. Можно попробовать использовать другие компиляторы, но большинство из них такие как ICCTINY, WinAVR так же не поддерживают С для этих контроллеров. Прибегнув к некоторым ухищрениям все таки можно писать программы на С для этих контроллеров. Для этого необходимо, чтобы все переменные были глобальными и размещались в регистрах, последнее достигается путем использования модификатора register при объявлении переменных.
register unsigned char i;
register insigned int k;
При таком объявлении переменных среда сама разместит переменные в регистрах. По умолчанию она разместит их в регистрах с R16 по R21. Если вы хотите использовать регистры по своему усмотрению, то это можно сделать с помощью директивы препроцессора #pragma regalloc- и указать самостоятельно куда поместить ту или иную переменную.
Пример работы с нашей обучающей программой. Часть 1
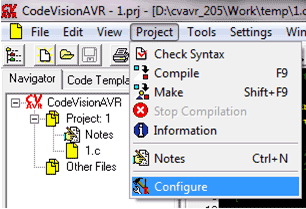
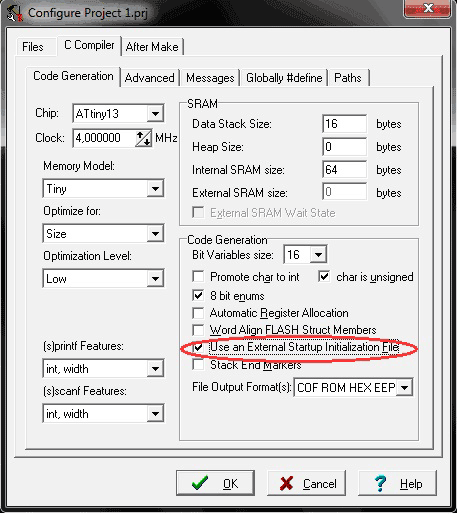
таким образом компилятор разместит переменную ttp в регистре R12, а переменную tmp в регистрах R10, R11, так как переменная типа int занимает два байта. Шаг второй, необходимо отключить генерацию startup кода, то есть кода который выполняется до начала работы основной программы. Для этого в свойствах проекта На вкладке C Compiler нужно установить флажок внешнего startup файла рис.2. Далее из каталога BIN программы скопировать файл STARTUP.ASM в каталог проекта и подправить его удалив команды очистки памяти SRAM так как ее нет в наших контроллерах изменить регистр косвенной адресации и убрать инициализацию глобальных переменных.
;CodeVisionAVR C Compiler ;(C) 1998-2004 Pavel Haiduc, HP InfoTech s.r.l. ;EXAMPLE STARTUP FILE FOR CodeVisionAVR V1.24.1 OR LATER .EQU __CLEAR_START=0X60 ;START ADDRESS OF SRAM AREA TO CLEAR ;SET THIS ADDRESS TO 0X100 FOR THE ;ATmega128 OR ATmega64 CHIPS .EQU __CLEAR_SIZE=256 ;SIZE OF SRAM AREA TO CLEAR IN BYTES CLI ;DISABLE INTERRUPTS CLR R30 OUT EECR,R30 ;DISABLE EEPROM ACCESS ;DISABLE THE WATCHDOG LDI R31,0x18 OUT WDTCR,R31 OUT WDTCR,R30 OUT MCUCR,R30 ;MCUCR=0, NO EXTERNAL SRAM ACCESS ;CLEAR R2-R14 LDI R24,13 LDI R26,2 CLR R27 __CLEAR_REG: ST X+,R30 ; В наших контроллерах нет регистра Х, поэтому заменим его на Y ST Y+,R30 DEC R24 BRNE __CLEAR_REG ;CLEAR SRAM LDI R24,LOW(__CLEAR_SIZE) LDI R25,HIGH(__CLEAR_SIZE) LDI R26,LOW(__CLEAR_START) LDI R27,HIGH(__CLEAR_START) __CLEAR_SRAM: ST X+,R30 SBIW R24,1 BRNE __CLEAR_SRAM ;GLOBAL VARIABLES INITIALIZATION LDI R30,LOW(__GLOBAL_INI_TBL*2) LDI R31,HIGH(__GLOBAL_INI_TBL*2) __GLOBAL_INI_NEXT: LPM ADIW R30,1 MOV R24,R0 LPM ADIW R30,1 MOV R25,R0 SBIW R24,0 BREQ __GLOBAL_INI_END LPM ADIW R30,1 MOV R26,R0 LPM ADIW R30,1 MOV R27,R0 LPM ADIW R30,1 MOV R1,R0 LPM ADIW R30,1 MOV R22,R30 MOV R23,R31 MOV R31,R0 MOV R30,R1 __GLOBAL_INI_LOOP: LPM ADIW R30,1 ST X+,R0 SBIW R24,1 BRNE __GLOBAL_INI_LOOP MOV R30,R22 MOV R31,R23 RJMP __GLOBAL_INI_NEXT __GLOBAL_INI_END:
CodeVisionAVR
Красным отмечено все, что нужно убрать. Шаг третий, необходимо подключить заголовочный файл.
Так как в каталоге INC программы отсутствуют заголовочные файлы для наших контроллеров, то мы можем использовать файл TINY13.h так как на пример tiny13 и tiny 15 имеют практически одинаковый состав регистров расположенных по одним и тем же адресам, но обязательно с оглядкой на datasheet используемого контроллера. В прилагаемом примере два регистра все же отличались, по этому для наглядности сделал дополнительное определение. При написании программ на С для контроллеров без оперативной памяти необходимо помнить, что эти микросхемы имеют трех уровневый аппаратный стек, в котором хранятся адреса возврата из функций, так, что не стоит увлекаться вложенными функциями, во избежание переполнения стека. Если предполагается использовать в своей программе прерывания, то обязательно необходимо использовать директиву препроцессора #pragma savereg-, которая предписывает компилятору не сохранять автоматически регистры в память при входе в процедуру обработки прерывания.
Далее после написания программы и ее компиляции необходимо подправить выходной asm файл который будет находиться в рабочем каталоге проекта. В нем компилятор генерирует команды инициализации стека, которых нет в наших контроллерах. Убрать нужно всего 4 строчки, которые находятся непосредственно перед началом основной программы:
.CSEG .ORG 0 .INCLUDE «1.vec» .INCLUDE «1.inc» __RESET: .INCLUDE «STARTUP.ASM» ;STACK POINTER INITIALIZATION LDI R30,LOW(0x9F) OUT SPL,R30 ;DATA STACK POINTER INITIALIZATION LDI R28,LOW(0x70) LDI R29,HIGH(0x70) RJMP _main .ESEG .ORG 0 .DSEG .ORG 0x70 ; 1 #include ; 2 ; 3 register unsigned char i; ; 4 void main(void)
После этого можно компилировать выходной asm файл. Делать это нужно по тому, что мы его немного подправили и тот hex, что сгенерировала программа нам уже не подойдет. Сделать это можно просто, в каталоге BIN программы находится компилятор avrasm2.exe, его можно скопировать в каталог проекта и выполнить команду:
avrasm2.exe –fI –o myfile.hex myfile.asm
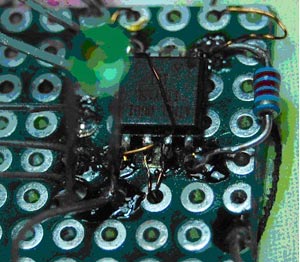
Проект часто приходится перекомпилировать, по этому, чтобы не писать в командной строке много раз одно и тоже, можно создать файл с расширением bat (myfile.bat) и записать в него команду приведенную ниже, теперь для перекомпиляции достаточно его запустить и в итоге вы получите готовый к использованию hex файл. Теперь о программировании контроллера. Специально для вас я собрал маленькое демонстрационное устройство на ATTINY15 состоящее из контроллера, двух резисторов и светодиода, и запрограммировал его. 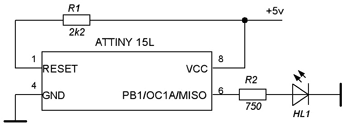
 Текст программы на языке С написанный в CVAVR 1.24.8d
Текст программы на языке С написанный в CVAVR 1.24.8d
/*********************************************/ /* Demo project ATTINY15 */ /* Cade Vision AVR 1.24.8d */ /* by Panda_Y2K */ /* 2012 */ /*********************************************/ #include sfrb OCR1A=0x2e; sfrb TCCR1=0x30; register unsigned char i,j; void main(void) < GIMSK = 0; TIMSK0 = 0x00; TCCR0B = 0x00; PORTB = 0; //Clear PORTB DDRB = 0x02; //PORTB.1 out // CTC = 0, PWM1 = 1, COM1A1 = 1, COM1A0 = 0, CS13 = 0, CS12 = 1, CS11 = 1, CS10 = 1 // CK/4 TCCR1 = 0x67; while (1) < for (i=255; i>0; i—) 0; j—); >; >; > //end of main
Источник: cxem.net
Примеры программ для AVR для среды Code Vision
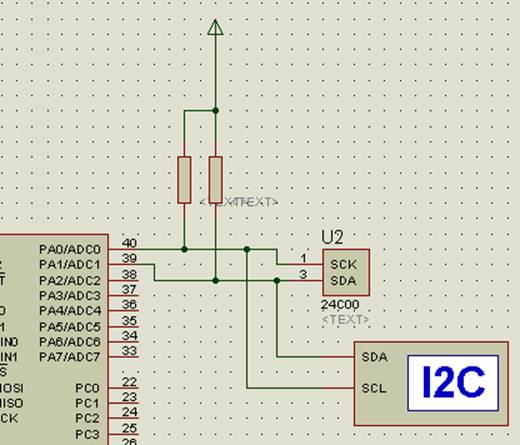
Перед тем как использовать библиотеку i2c необходимо указать какой порт используется под этот интерфейс, и какие его биты задействованы под линии sda и scl.
- void i2c_init(void) – инициализация I2C, эта функция должна выполняться первой
- unsigned char i2c_start(void) – Start, возвращается 1 если линия свободна, и 0 если занята
- void i2c_stop(void) – Stop
- unsigned char i2c_read(unsigned char ack) – чтение байта, параметр ack (о нем в файле теории)
- unsigned char i2c_write(unsigned char data) – запись байта, returns 1 if the slave acknowledges or 0 if not
unsigned char i2c_write(unsigned char data) — Returns 1 if the slave acknowledges or 0 if not.
В среде на панели виртуальный инструментов есть I2C Debugger
При моделировании необходимо линии SCL и SDA резисторами подтягивать к питанию.
Реакция терминала I2C на команды CodeVisionAVR
Источник: vunivere.ru
Архив метки: CodeVisionAVR
Подключение GSM модуля к микроконтроллеру AVR ATmega16
Опубликовано 13.09.2019 автором admin-new 7 февраля, 2021
Интерес к GSM модулям возникает когда появляется потребность в удаленном управлении каким либо устройством. GSM модуль может выполнять все те же действия, какие может производить сотовый телефон: совершение и прием звонков, передача/прием SMS, соединение с интернетом при помощи технологии GPRS … Читать далее →
Связь двух микроконтроллеров AVR ATmega8 через радиочастотные модули
Опубликовано 29.07.2019 автором admin-new 10 марта, 2021

Беспроводная связь может значительно расширить возможности микроконтроллеров по управлению какими либо процессами, поэтому изучение взаимодействия микроконтроллеров с радиочастотными модуля является весьма актуальной задачей для специалистов в этой области. В самом простом случае беспроводная связь на короткие расстояния организуется с помощью … Читать далее →
Подключение Bluetooth-модуля HC-05 к микроконтроллеру AVR ATmega8
Опубликовано 28.07.2019 автором admin-new 7 февраля, 2021

В этой статье мы рассмотрим подключение Bluetooth-модуля HC-05 к микроконтроллеру ATmega8 (семейство AVR), а затем установим связь между смартфоном под управлением операционной системы Android и микроконтроллером ATmega8 с помощью Bluetooth-модуля, который будет использовать для связи с микроконтроллером универсальный асинхронный приемопередатчик … Читать далее →
Свежие записи
- Беспроводная сеть на Arduino и нескольких модулях NRF24L01
- Определение ориентации с помощью акселерометра ADXL345 и Arduino
- Как настроить GRBL и управлять станком с ЧПУ с помощью Arduino
- Объяснение основных команд G-кода
- Измеритель качества воды на ESP32 и TDS датчике
Рубрики
- Проекты на ESP32
- Проекты на ESP8266
- Проекты на Raspberry Pi
- Проекты на STM32
- Схемы на Arduino
- Схемы на AVR
- Схемы на MSP430
- Схемы на PIC
Свежие комментарии
- Сергей к записи ПИД регулятор температуры на Arduino, термопаре и модуле MAX6675
- admin-new к записи Использование таймеров и прерываний от них в модуле ESP32
- admin-new к записи Использование таймеров и прерываний от них в модуле ESP32
- Сергей к записи Использование таймеров и прерываний от них в модуле ESP32
- Сергей к записи Использование таймеров и прерываний от них в модуле ESP32
- admin-new к записи Умная Wi-Fi розетка на модуле ESP8266
Источник: microkontroller.ru