
3.1. Определение областей процесса. Для составления алгоритма работы и программы управления каким-либо технологическим агрегатом целесообразно разделить процесс на ряд связанных функциональных областей. Так, например, процесс смешивания двух компонентов на установке периодического действия может быть представлен следующим образом (рис. 4.6):
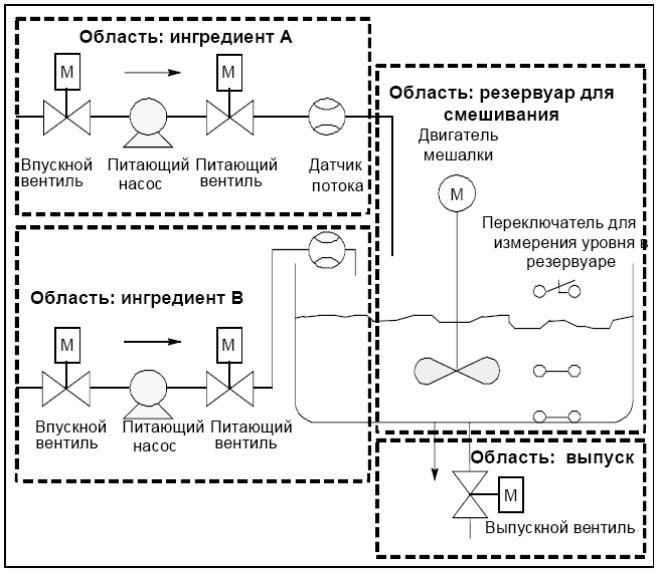
Рис. 4.6. Пример разделения на функциональные области
процесса смешивания двух компонентов
В нашем примере промышленного процесса смешивания можно выделить четыре отдельные области. В этом примере область для ингредиента А содержит такое же оборудование, как и область для ингредиента В.
3.2. Описание отдельных функциональных областей. Описывая каждую область и задачу внутри вашего процесса, вы не только определяете функционирование каждой области, но и различные элементы, управляющие этой областью. Они включают в себя:
1. Первая программа в Step 7 / Для новичков в программировании Simatic
• электрические, механические и логические входы и выходы для каждой задачи;
• блокировки и зависимости между отдельными задачами.
Промышленный процесс смешивания в нашем примере использует насосы, двигатели и вентили. Они должны быть точно описаны для определения рабочих характеристик и типа блокировок, необходимых во время работы.
Области ингредиентов А и В:
• Трубы для каждого ингредиента оборудованы впускным вентилем, питающим вентилем и питающим насосом.
• Впускные трубы имеют также датчики потока.
• Включение питающих насосов должно блокироваться, когда датчик уровня резервуара показывает, что резервуар полон.
• Запуск питающих насосов должен блокироваться, когда выпускной вентиль открыт.
• Впускной и питающий вентили должны открываться, самое раннее, через 1 секунду после запуска питающего насоса.
• Вентили должны закрываться немедленно после останова питающих насосов (сигнал датчика потока), чтобы предотвратить просачивание ингредиентов из насоса.
• Запуск питающих насосов объединен с функцией контроля времени, иными словами, в течение 7 секунд после запуска насосов датчик потока должен сообщить о наличии потока.
• Питающие насосы должны выключаться настолько быстро, насколько возможно, если датчик потока больше не сигнализирует о наличии потока в то время, как питающие насосы работают.
• Количество запусков питающих насосов должно подсчитываться (интервал технического обслуживания).
Область резервуара для смешивания:
• Запуск электродвигателя мешалки должен блокироваться, когда датчик уровня резервуара показывает «уровень ниже минимума» или открыт выпускной вентиль.
• Электродвигатель мешалки после достижения номинальной скорости посылает ответный сигнал. Если этот сигнал не принимается в течение 10 секунд после запуска электродвигателя, то электродвигатель должен быть выключен.
• Количество запусков электродвигателя мешалки должно подсчитываться
S7-1200. Пример программы для конвейера
(интервал технического обслуживания).
• В резервуаре для смешивания должны устанавливаться три датчика:
• Резервуар полон: нормально замкнутый контакт. Этот контакт размыкается, когда достигается максимальный уровень резервуара.
• Уровень резервуара выше минимума: нормально разомкнутый контакт. Этот контакт замыкается, когда достигается минимальный уровень резервуара.
• Резервуар непустой: нормально разомкнутый контакт. Этот контакт замкнут, если резервуар непустой.
Область выпуска:
• Выпуск из резервуара контролируется электромагнитным вентилем.
• Электромагнитный вентиль управляется оператором, но должен закрываться снова, самое позднее, когда генерируется сигнал «резервуар пуст».
Открытие выпускного вентиля блокируется, когда
— работает электродвигатель мешалки;
3.3 Список входов, выходов и входов/выходов. Сделав физическое описание каждого устройства, подлежащего управлению, нарисуйте диаграммы входов и выходов для каждого устройства или группы задач.
В нашем примере промышленного процесса смешивания используются два питающих насоса и одна мешалка. Каждый двигатель управляется своим собственным «блоком двигателя», одинаковым для всех трех устройств (рис. 4.8). Этот блок требует шести входов: два для запуска и остановки двигателя, один для сброса обслуживающего дисплея, один для ответного сигнала о работе двигателя (двигатель работает/не работает), один для времени, в течение которого должен быть получен ответный сигнал, и один для номера таймера, используемого для измерения времени.
Логический блок требует также четырех выходов: два для индикации рабочего состояния двигателя, один для индикации неисправностей и один для индикации того, что двигатель подлежит обслуживанию. Для активизации двигателя необходим также вход/выход. Он используется для управления двигателем, но в то же время редактируется и изменяется в программе для «блока двигателя».

Рис. 4.8. Логический блок двигателя
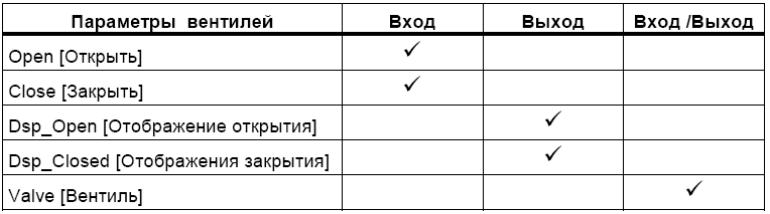
Каждый вентиль управляется собственным «блоком вентиля» (рис. 4.9), одинаковым для всех используемых вентилей. Логический блок имеет два входа: один для открытия вентиля и один для его закрытия. У него имеется также два выхода: один для индикации того, что вентиль открыт, а другой для индикации того, что он закрыт.
Блок имеет вход/выход для активизации вентиля. Он используется для управления вентилем, но в то же самое время редактируется и изменяется в программе для «блока вентиля».
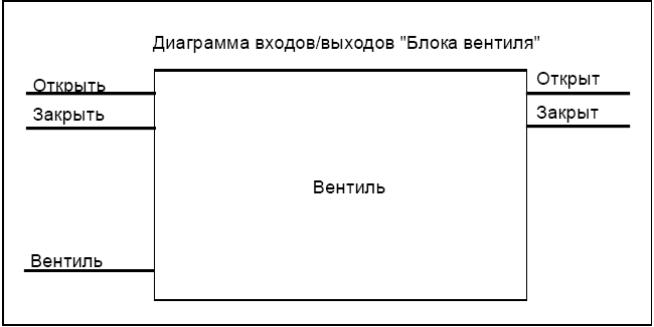
Рис. 4.9. Логический блок вентиля
3.4. Определение требований безопасности. Выясните, какие устройства требуют аппаратно реализованных схем для удовлетворения требований безопасности. Промышленный процесс смешивания в нашем примере использует следующую логику для своей схемы защиты — один аварийный выключатель отключает следующие устройства независимо от программируемого контроллера (ПЛК):
— питающий насос для ингредиента А;
— питающий насос для ингредиента B;
Аварийный выключатель находится на станции оператора. Один вход в контроллер индицирует состояние аварийного выключателя.
3.5. Описание пульта оператора. Каждый процесс требует интерфейса с оператором, который обеспечивает вмешательство человека в процесс. Часть спецификации проекта включает в себя проект пульта оператора В промышленном процессе смешивания, описанном в нашем примере, каждое устройство может быть запущено или остановлено нажатием кнопки, расположенной на пульте оператора.
Этот пульт оператора содержит индикаторы для отображения состояния функционирования (см. рис. 4.10).
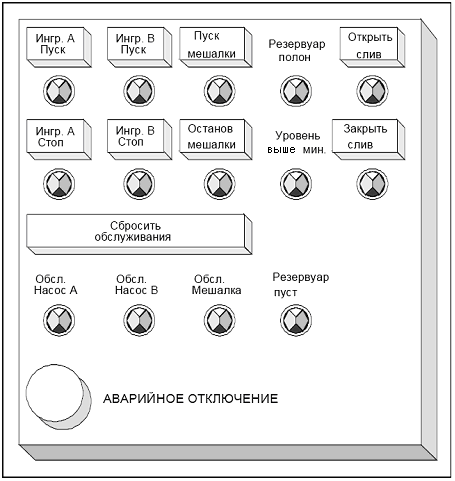
Рис. 4.10. Пульт оператора технологической установки смешивания
3.6. Выбор управляющего оборудования. После того как вы задокументировали требования к проекту, вы должны принять решение относительно типа управляющего оборудования, требующегося для проекта.
Принимая решение о том, какие модули вы хотите использовать, вы также определяете структуру программируемого контроллера. Составьте конфигурационную диаграмму, определяющую следующие аспекты:
— количество и тип модулей ввода/вывода;
— конфигурация физических входов и выходов.
Следующий рисунок иллюстрирует пример конфигурации S7 для промышленного процесса смешивания.
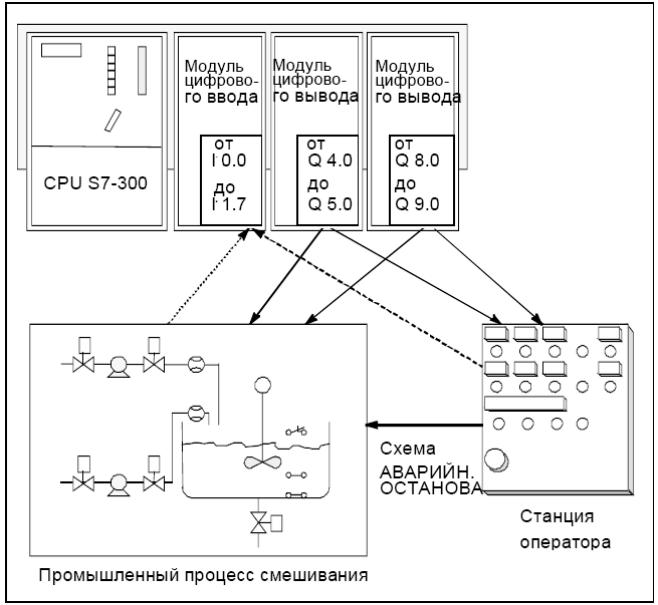
Рис. 4.11. Пример конфигурации S7 для промышленного процесса смешивания
3.7. Определение логических блоков. Вы структурируете программу, распределяя программу пользователя по различным блокам и устанавливая иерархию вызовов блоков. Следующий рисунок показывает иерархию блоков, вызываемых в структурированной программе.
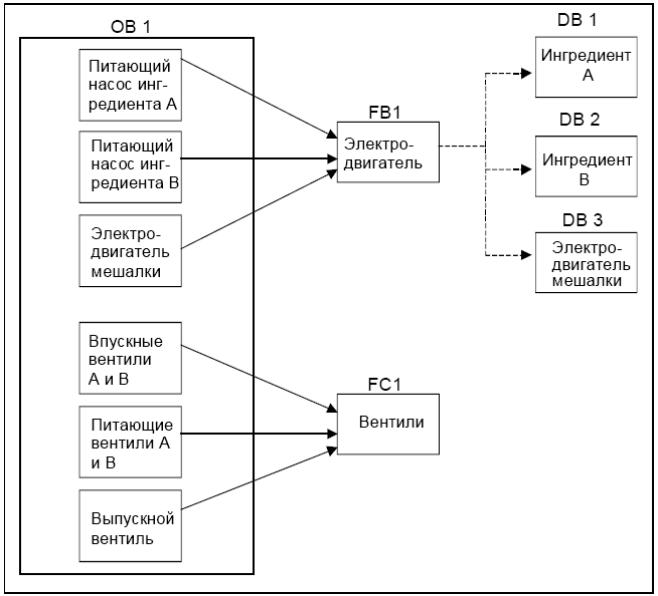
Рис. 4.12. Иерархия блоков, вызываемых в структурированной программе
OB1: Образует интерфейс с операционной системой CPU и содержит основную программу. В OB1 вызываются блоки FB1 и FC1 и передаются специальные параметры, требуемые для управления процессом.
FB1: Питающий насос для ингредиента A, питающий насос для ингредиента B и электродвигатель мешалки могут управляться одним функциональным блоком, потому что требования (включение, выключение, подсчет и т.д.) идентичны.
Экземплярные DB 1-3: Фактические параметры и статические данные для управления питающими насосами для ингредиента A, ингредиента B и для электродвигателя мешалки различаются и поэтому сохраняются в трех экземплярных DB, связанных с FB1.
FC1: Впускные и питающие вентили для ингредиентов А и B и выпускной вентиль тоже используют общий логический блок. Поскольку должна программироваться только функция «открыть и закрыть», то достаточно
одного единственного FC.
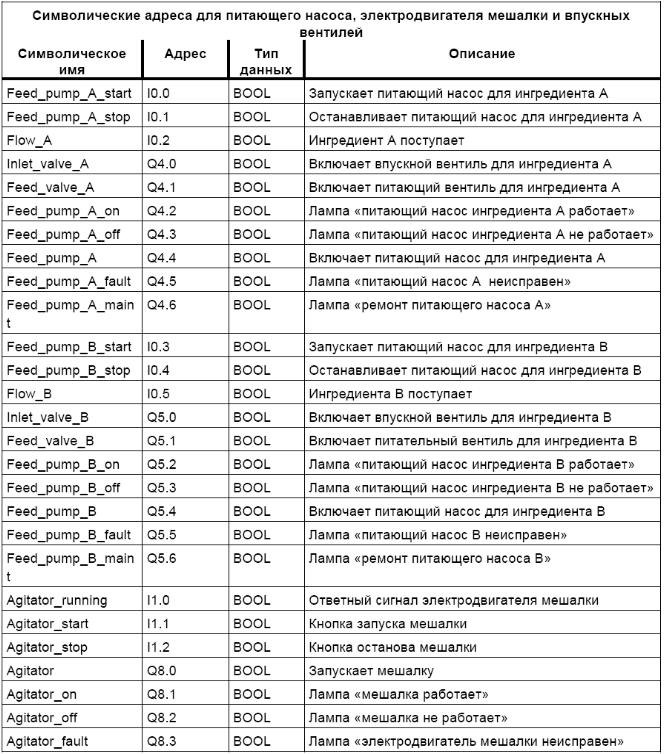
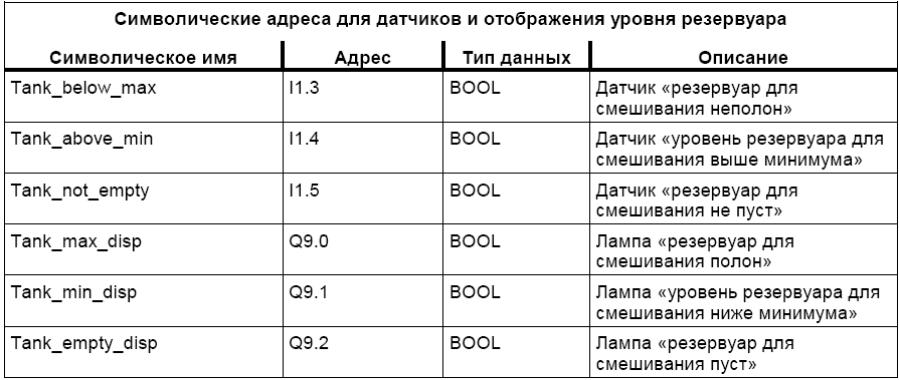
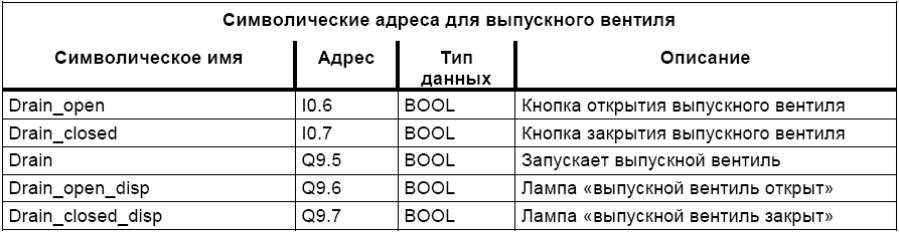
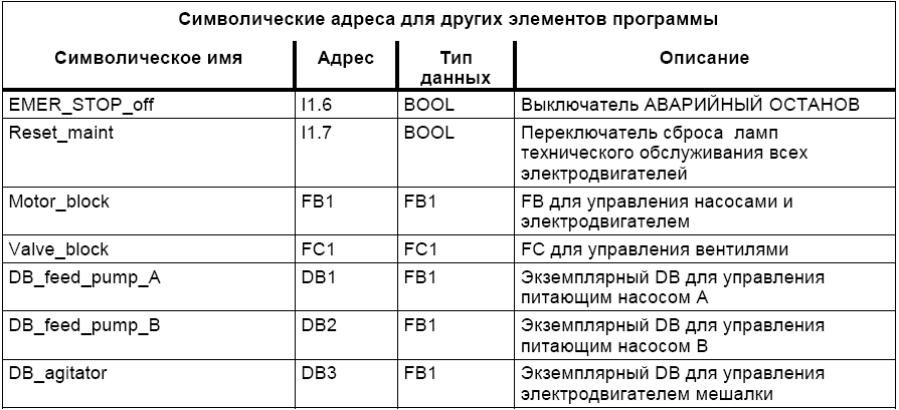
3.8. Определение символических имен. Символы используются в типовой программе, и они должны быть определены в таблице символов с помощью STEP 7. Таблица 4.6 показывает символические имена и абсолютные адреса элементов, используемых в программе.

3.9. Создание FB электродвигателя. FB электродвигателя содержит следующие логические функции:
— имеются вход запуска и вход останова;
— ряд блокировок разрешает работу устройств (насосов и электродвигателя мешалки). Состояние блокировок хранится во временных локальных данных (L-стек) OB1 (”Motor_enable», ”Valve_enable») и логически объединяется со входами запуска и останова, когда FB для электродвигателя обрабатывается;
-сигнал обратной связи от устройств должен появляться в течение заданного времени. В противном случае предполагается, что произошла ошибка или отказ. Тогда эта функция останавливает электродвигатель;
— должны задаваться момент времени и длительность ответного сигнала или период ошибки/отказа;
— если нажимается кнопка запуска и электродвигатель разблокирован, то
устройство самостоятельно включается и работает до тех пор, пока не нажата кнопка останова;
— когда включается устройство, запускается таймер. Если ответный сигнал устройства не будет принят прежде, чем истечет время таймера, то устройство останавливается.
3.10. Спецификация входов и выходов. Рисунок 4.13 показывает входы и выходы общего FB для электродвигателя.
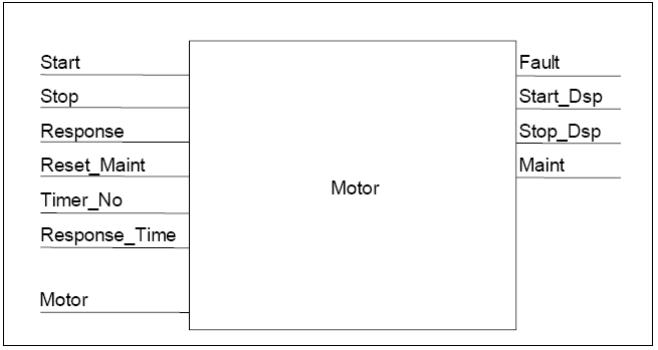
Рис. 4.13. Входы и выходы общего FB для электродвигателя
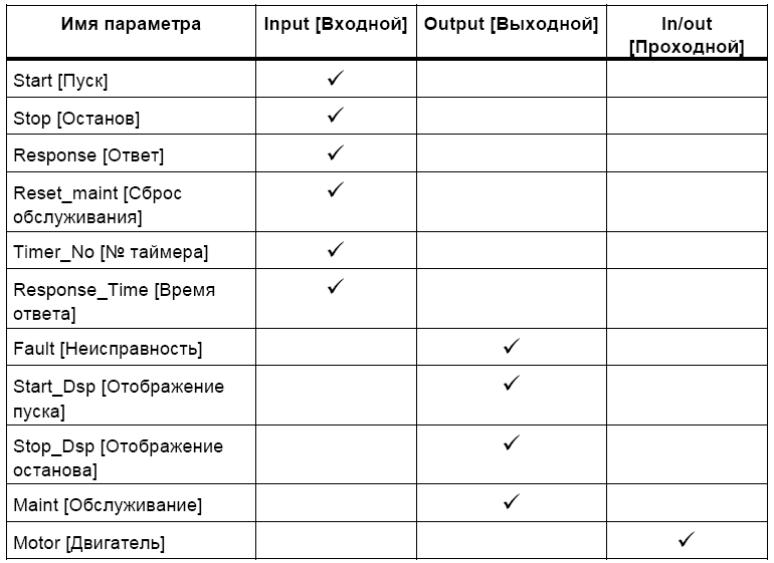
3.11. Определение параметров FB. Если вы используете мультиэкземплярный FB электродвигателя (для управления как насосами, так и электродвигателем мешалки), то вы должны определить общие имена параметров для входов и выходов.
FB электродвигателя в типовом процессе требует следующего:
— он должен получать от станции оператора сигналы на останов и запуск электродвигателя и насосов;
— он требует сигналов ответа от электродвигателя и насосов, означающих, что электродвигатель работает;
— он должен вычислять время между передачей сигнала на запуск электродвигателя и приемом ответного сигнала. Если за это время ответный сигнал не будет получен, то электродвигатель должен выключаться;
— он должен включать и выключать лампы на станции оператора;
— он выдает сигнал, запускающий электродвигатель.
Эти требования можно определить в качестве входов и выходов FB.
Следующая таблица показывает параметры FB электродвигателя в нашем типовом процессе.
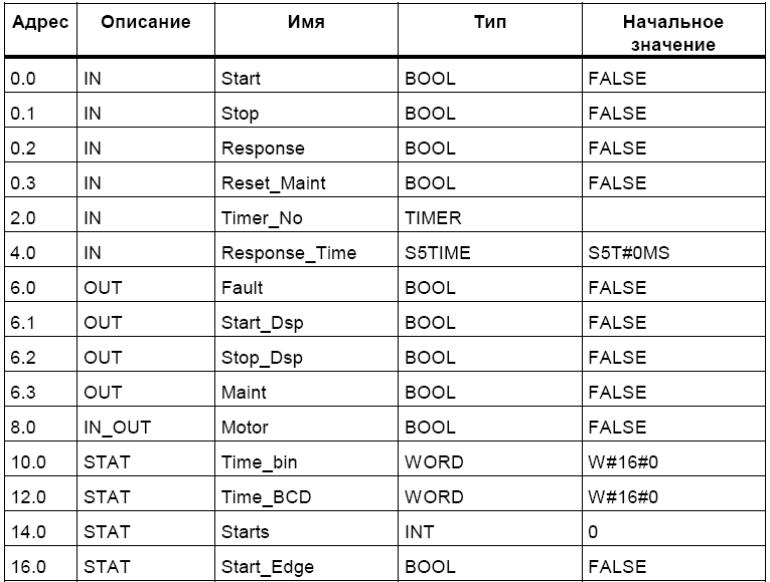
3.12. Описание переменных FB для электродвигателя. Вы должны описать входные, выходные и проходные (in/out) FB для электродвигателя (см. табл. 4.8). В FB входные, выходные, проходные (in/out) и статические переменные сохраняются в экземплярном DB, указанном в команде вызова.
Временные переменные сохраняются в L-стеке.
3.13. Программирование FB для электродвигателя. В STEP 7 каждый блок, вызываемый другим блоком, должен создаваться раньше блока, содержащего его вызов. Поэтому в типовой программе вы должны создать FB для электродвигателя раньше OB1.
3.14. Создание экземплярных блоков данных Создайте три блока данных и откройте их один за другим. В диалоговом окне «New Data Block [Новый блок данных]» выберите опцию «Data block referencing a function block [Блок данных, ссылающийся на функциональный блок]». В списке «Reference [Ссылка]» выберите «FB1». Тогда блоки данных определяются как экземплярные блоки данных с фиксированным назначением блоку FB1.
3.15. Создание FC для вентилей. Функция для впускных и питательных вентилей и выпускного вентиля содержит следующие логические функции:
— имеются вход для открытия и вход для закрытия вентилей;
— блокировки разрешают вентилям открываться. Состояние блокировок хранится во временных локальных данных (L-стек) OB1 (”Valve_enable») и логически объединяется с входами для открытия и закрытия, когда FC для вентилей обрабатывается.
Следующая таблица показывает параметры, передаваемые в FC.
3.16. Спецификация входов и выходов Следующий рисунок показывает входы и выходы общей FC для вентилей. Устройства, вызывающие FB электродвигателя, передают входные параметры. FC вентилей возвращает выходные параметры.
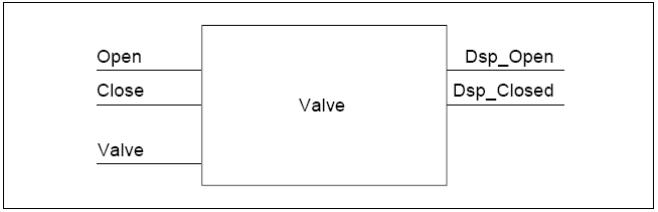
Рис. 4.14. Входы и выходы общей FC для вентилей
3.17. Описание переменных FC для вентилей. Так же, как и у FB для электродвигателя, вы должны для FC вентилей описать входные, выходные и проходные (in/out) параметры (см. таблицу 4.10 описания переменных).

В FC временные переменные хранятся в L-стеке. Входные, выходные и проходные (in/out) переменные хранятся в виде указателей на логический блок, который вызвал FC. Для этих переменных используется дополнительное пространство памяти в L-стеке (после временных переменных) .
3.18. Программирование FC для вентилей. Функция FC1 для вентилей должна создаваться раньше OB1, так как вызываемые блоки должны создаваться раньше вызывающих блоков.
3.19. Создание OB1. OB1 определяет структуру типовой программы. OB1 содержит также параметры, передаваемые различным функциям, например:
Сегменты AWL для питающих насосов и электродвигателя мешалки снабжают FB электродвигателя входными параметрами для запуска («Start»), останова («Stop»), отклика («Response») и сброса отображения технического обслуживания («Reset_Maint»). FB электродвигателя обрабатывается в каждом цикле ПЛК.
Если FB электродвигателя обрабатывается, входы Timer_No и Response_Time сообщают функции об используемом таймере и о том, какое время должно измеряться.
FC вентилей и FB электродвигателя обрабатываются в каждом цикле программы программируемого контроллера, потому что они вызываются в OB1. Программа использует FB электродвигателя с разными экземплярными DB, чтобы обрабатывать задачи управления питающими насосами и электродвигателем мешалки.
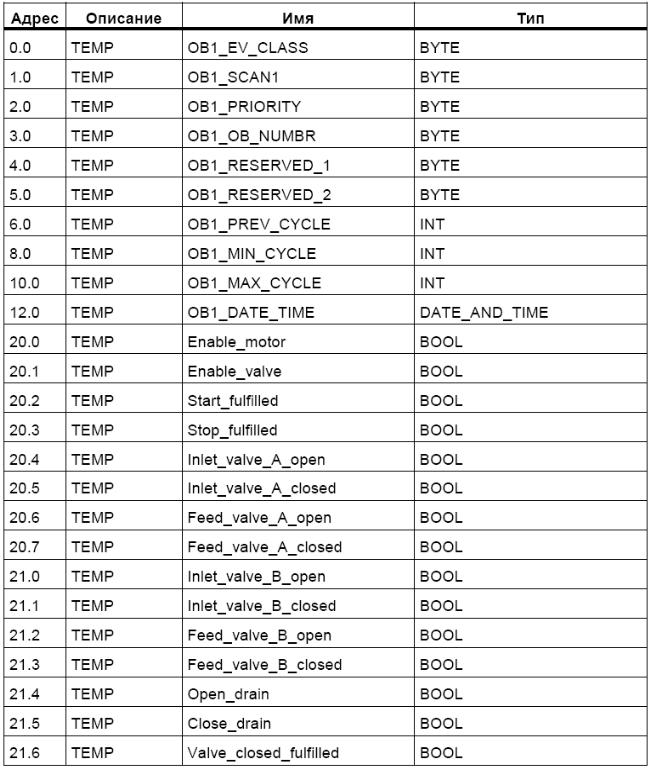
3.20. Описание переменных для OB1. Таблица 4.11 описания переменных для OB1 показана ниже. Первые 20 байтов содержат стартовую информацию OB1 и не должны изменяться.
3.21. Создание программы для OB1. В STEP 7 каждый блок, вызываемый другим блоком, должен создаваться прежде блока, содержащего его вызов. Поэтому в типовой программе вы должны создать и FB электродвигателя, и FC вентилей прежде, чем программу для OB1. Блоки FB1 и FC1 вызываются в OB1 более одного раза; FB1 вызывается с разными экземплярными DB:
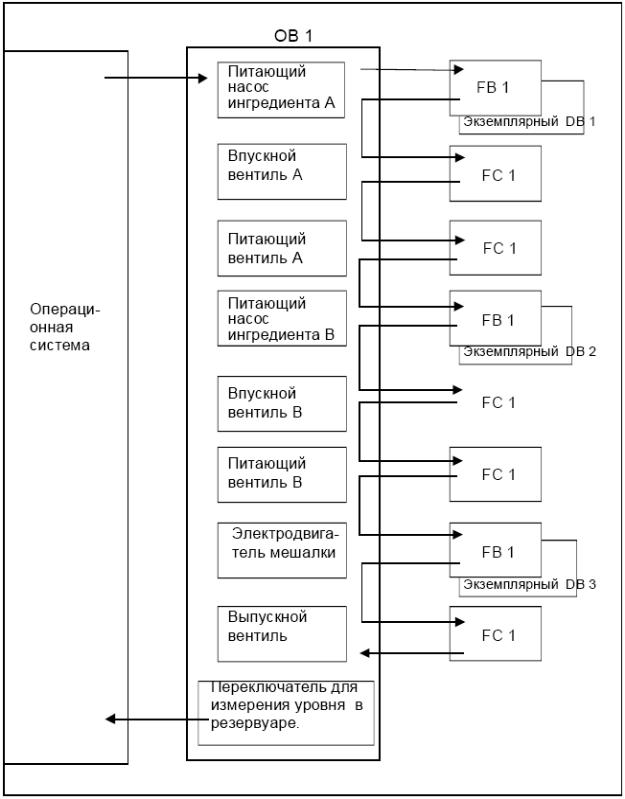
Рис. 4.15. Порядок вызова FB и FC из ОВ1
Источник: studfile.net
Codesys светофор
Возможно кому-то из начинающих будут полезны примеры программ, разработанных на двух популярных инструментальных средах Step7 (Siemens) и CodeSys.
Вроде кажется просто, помигал одним светом, затем другим. Но даже в этом случае не обойтись без триггеров, цепей самоподхвата, использования таймеров и прочего.
В первом случае программа выполнена на языке лестничных диаграмм, в другом случае на паскале образном языке ST


#Codesysсветофор, #step7светофор
Связанные материалы
- Вентилятор главного проветривания
- Scalance настройка
- Радар falcon и контроллер siemens
- WINCC OA отзывы пользователей
- Подбор персонала
Источник: fast-project.ru
Романов В.П. Учебно-методическое пособие — Основы языка программирования STEP7 и базового программного обеспечения промышленных контроллеров SIEMENS
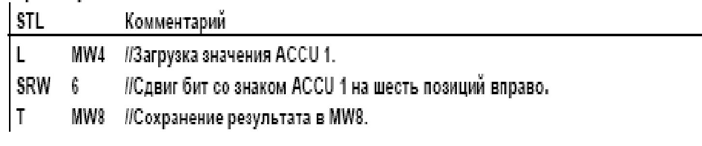
по следним, загру ж ается в бит С С1 сло ва со стояния . Би ты CC0 и OV сбрасываются в “0”.
Вы мож ете о ценить бит CC1 слова со стояния с помо щью оп ераций п ерех о да. Инстр у кци и
сдвига являются безуслов ными. Это значит, что о ни выпо лняются н езависим о от каких —
либо ус лов ий. Они не в лияют на бит RLO. Вы мож ете использовать следую щ ие
инстр у кции сдвига:
• SSI Сдвиг вправо целого числа со знаком
• SSD Сдвиг вправо двойного целого числа со знаком
• SLW Сдвиг слова влево
• SRW Сдвиг слова вправо
• SLD Сдвиг двойног о слова влево
• SRD Сдвиг двойного слова вправо
Рисуно к 11 — При ме р прим е нения ин струкций сд в ига
3.9 Обзор и нструкций с таймерами
Возможн ы следу ющие инстр у кции с тайм ерами:
• FR Деблокировка т аймера
• L Загрузка текущего значения таймера в ACCU 1 в фор мате Integer
• LC Загрузка т екущего значения таймера в ACCU 1 в BCD — коде
• R Сброс т аймера
• SD Таймер задерж ки включения
• SE Удлиненн ый импульс
• SF Таймер задержки выключения
• SP Импуль с
• SS Таймер задерж к и включения с памятью
В таблице 4 представлены о снов ные типы таймеров, исполь зу емых в прог раммах
на язы ке STEP 7 .
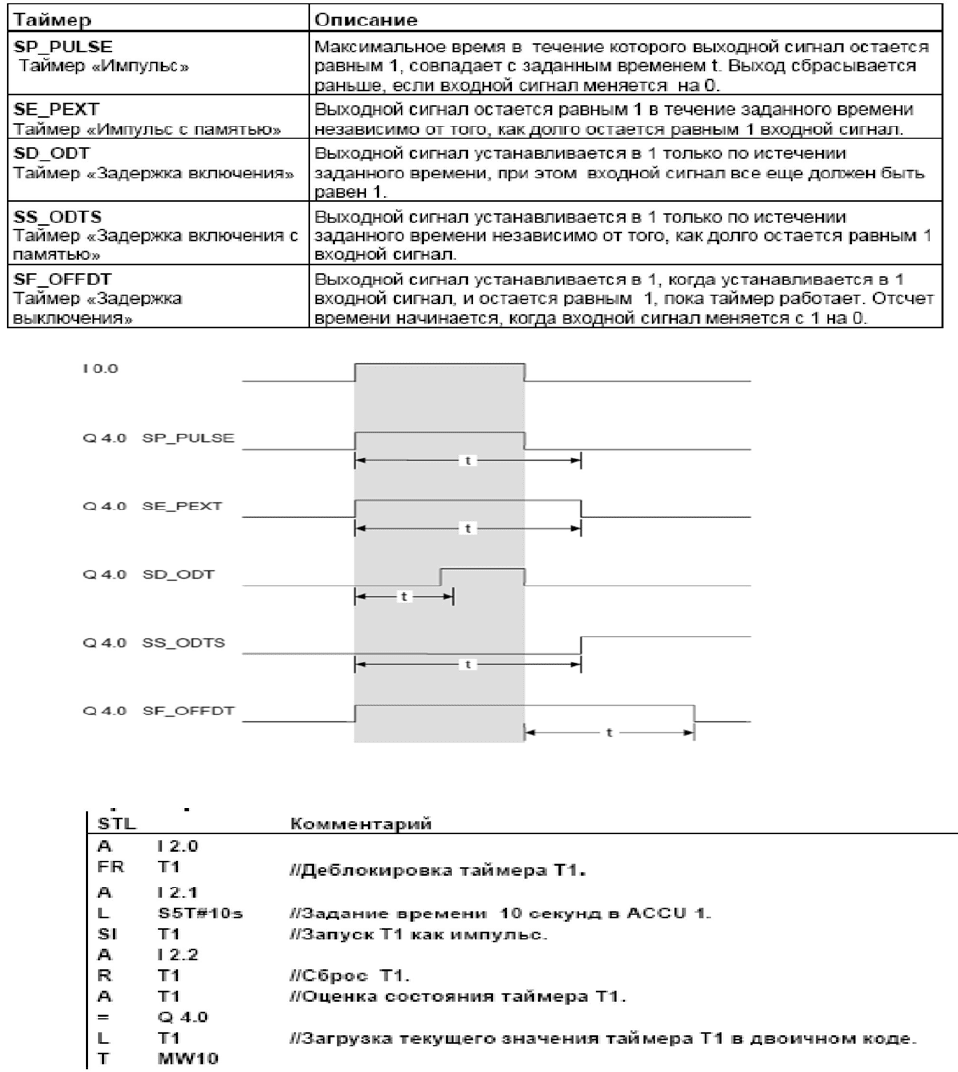
Таблица 4 — Основн ые типы тай ме ро в и а л го рит м их рабо ты
Рисуно к 12 — В ременн ые диагра ммы рабо ты таймеров
Рисуно к 13 — При ме р про грамм ы с и споль з о ванием т аймеров
3.10 Обзор и нструкций с аккумуляторами и адресными регистрами
В Вашем распо ряжен ии имеются следующи е и нструк ц ии для обработ ки
содержимого о дног о или об о их акку м уляторов:
• TAK Обмен содерж имым аккумуляторов ACCU 1 и ACCU 2
• PUSH Для CPU с двумя ак кумуляторами
• PUSH Для CPU с четыр ьмя аккумуляторами
• POP Для CPU с двумя аккумулят орами
• POP Для CPU с четырьмя аккумуляторами
• ENT Ввод в стек аккумуляторов
• LEAVE Вывод в ст ек аккумуляторов
• INC Инкремент ACCU 1-L-L
• DEC Декремент ACCU 1-L-L
• +AR1 Сложение ACCU 1 с адресным реги с тром AR 1
• +AR2 Сложение ACCU 1 с адресным реги с тром AR 2
• BLD Ин струкция отображе н ия пр ограммы
• NOP 0 Нулевая и нструкция
• NOP 1 Нулевая инструкция
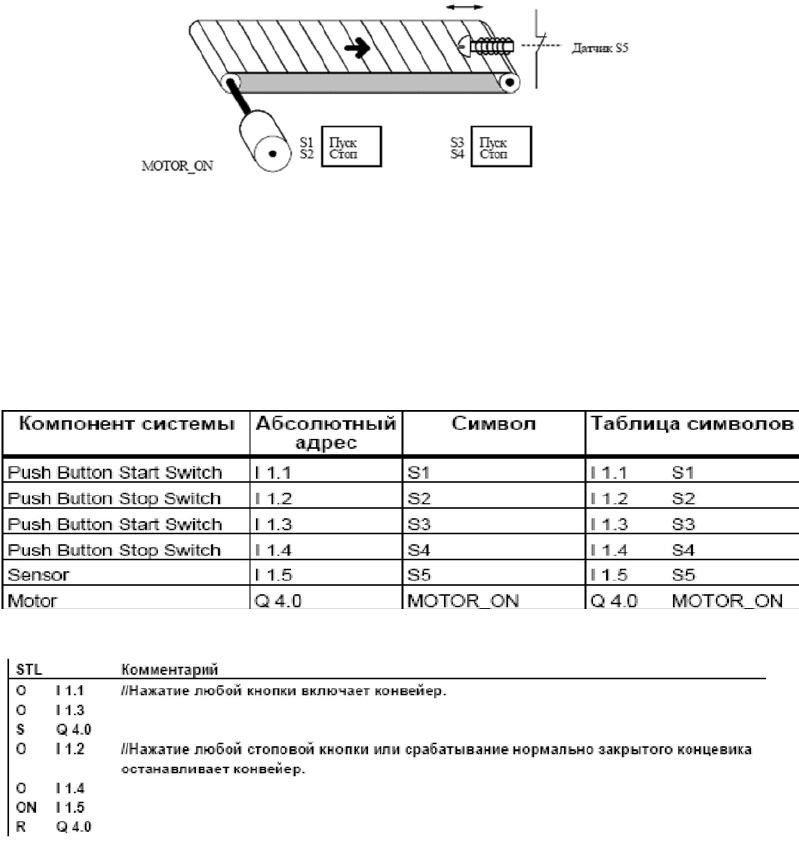
3.11 Примеры использования инструкций языка STEP 7 для составления
Пример 1: Управление лентой транспортера
На ри су н ке 14 по казана лен та т ра н спортера , которая может приводиться в
движени е с по мощью электро двигателя. В начале т ранспо ртера им еются две кноп ки: S1
для зап у ска и S2 для о станова. В к о нце транспорт ера тож е имеются две кн оп ки: S3 для
зап у ска и S 4 для о стано ва. Транспортер мо жно з апу скать или о станавли вать с л юбого
конц а . Т акже датчик S5 о станавливает транспортер, когда предмет, находящийся на ленте,
достиг ает конца.
Рисуно к 14 — В нешни й вид о бъект а управления (т ранспорт е ра)
Абсолютное и символьное программирован ие
Вы мож ете н аписать прог рамму для у п рав ления ленто й транспорт ера, показанного
на рис у нке 14, испо льзу я абсолютн ые з начения или их символьн ые и мена ,
представляющие ра зличны е компоненты к онвейера. В начале с лед ует соз дать таблицу
символов для того, что бы поставить в соответствие выбранным симв о льным именам
абсолютные адреса .
Таблица 5 — Таб л ица адр ес ации
Рисуно к 15- Списо к ин с трук ций для управ л ения ко нве й ером
Рисуно к 16 — В арианты про граммы управл ения
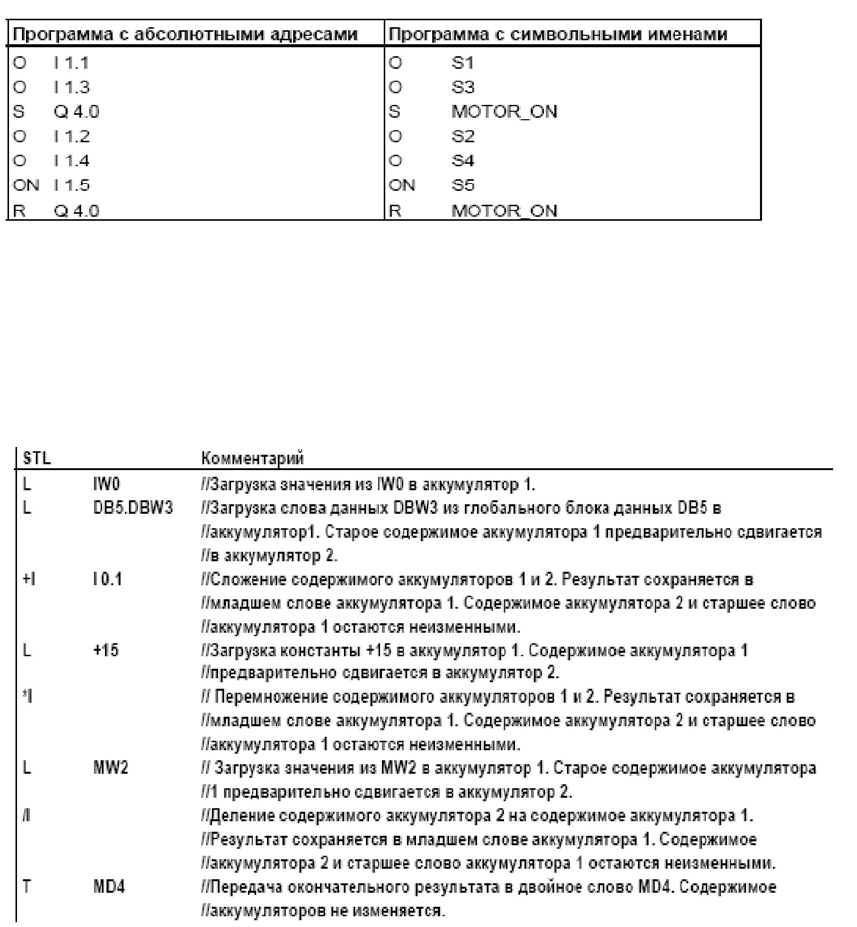
Пример2: М атематические инструкции с це лыми числами
Следую щий п ример про граммы по казывает, как испо льзовать арифметические
оп ерации с ц елыми чи слами и ко манды L и T для вычислени я рез у льтата сл едующего
ура внения:
MD4 = (( IW0 + DB5.W 3) x 15) / MW 2
Рисуно к 17 — Списо к инструкций про граммы
STEP7 — ИНС ТРУМЕНТАЛ ЬНЫЙ ПРО ГРАММНЫ Й К О МПЛЕКС ДЛЯ РАЗР АБО ТК И,
ТЕСТИРО В АН И Я И ДОКУ МЕНТ ИРОВА Н ИЯ ПРОГРА М М
Осно вными у тилитами пакета STEP 7, к о торые досту п ны из папки SIMA TI C —
STE P 7, являются:
SIMATIC Manager ;
LAD, ST L, FDB – Programmi ng S7;
Memor y Card Para m et er Assignment;
Net Pro – Confi gur ing Networks;
PID C ont rol Para m et er Assi g nment;
S7 SCL – Pr ogr ammi ng S 7 B l o cks;
S7-GRAPH – Pro grammi ng Sequent i al Co ntro l S ys t em;
S7-P DIAG – Confi gur ing Pro cess Diagn o st i c ;
S7-P LCSIM Sim u lat in g Mo du l es;
Sett in g t he PG-PC In t erf ace;
Co nfi gure SIMATIC W o r kspace .
Осно вн о й программой STEP 7 яв ляется S IMATI C Manager , ко то рый по зв о ляет
произво дить о сновные операции с про ектом, такие как создание, со х ранение, о ткры тие, а
также у правлять рабо то й проекта, запускать различные у тилиты , связывать их межд у
собой и т.д.
Программа LAD, STL, FDB – Progr am mi ng S7 B l o cks – редактор, позволяющи й
программиров ать блоки, основываясь н а о дном из трех п ред став лений язы ка
программиров ания. Язы к LA D – L adder D iagram ( контактны й план) – и спользу ет
представление програм мы в виде ко мму тацио нной сх емы, состоящей из переключателей,
линий связи, ключей и т.п. S TL – Statem ent List (спи с о к о ператоров) – язык, подо бн ы й
ассемблеру . FDB – Funct i o n B l o ck D ia gra m – фу нкцио нальная схема, о снованн ая на
логических элементах, тригг ерах и т.п.
Утилита Memor y Car d Paramete r A ssignm ent по зволяет с о хранять
по льз о ватель ску ю прог рамму в пам ять E PROM (электрически про граммиру емая
по стоянная память), использу я про грамматор или, в слу ча е персо нальной ЭВМ, на
внешн ее у стро йство.
Прог рамма NetPr o – Conf igurin g Net wo rks позволяет конфиг у риро вать
промышленны е сети, такие как M PI, PROFIBUS или Industri a l Et hernet.
Утилита P ID Control Pa rameter A ssignment поз воляет автоматизировать
процеду ру расчет а и настройки параметров ПИД — рег у лято ров, использу емы х в си стемах
управления.
С базов ым пакет о м о бычно поставляются специальные у тилиты , позв оляющие
проводить с оз дание программ различными спо с о бами, таким и как: написание прог ра мм
на язы ке программ ирования высокого у ро вня SCL, кото рый по х ож н а паскаль, с помощ ью
программы S7 SCL; г рафическа я разработка пр о грамм в виде по следовательности шаг о в и
переходов между ни ми по средством у тилит ы S7- GRA P H. Мог у т та кже по ставлят ься
дополн ительные пакеты.
S7-PDIAG – Configuring P ro cess D i ag nost ic – это программа, испо льзу емая для
диагно стики проектов.
Утилита S7-PLCSIM S im u lat in g Modules предназначена для п рог раммн о й
имитац ии рабо ты контроллера, что позволяет разрабатывать п р о екты и проверять и
от лаживать работу прог рамм без подключения реального о б о руд о вания.
Прог рамма Setting t he PG-PC I n terface применяется для у станов ки пар аметро в
ло кальных станций, подключенных к м ногот очечно му интерф ейс у MPI.
Configure SIMATIC Workspace по зволяет конф иг у риро вать пр о екты, создаваемые
с использовани ем нескольких терминал ов .
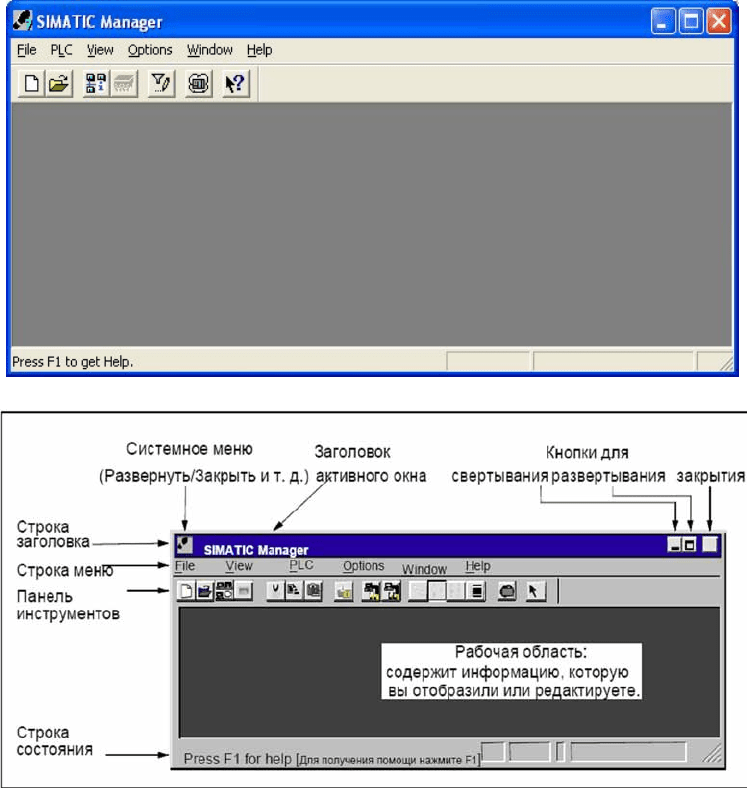
5.1 ЭЛЕМЕНТЫ ПРОЕКТА В SIMATIC M ANA GER
SIMATIC Manager – это графический интерфейс для ре дактиров ания о бъектов S7
(проектов, файлов польз о ватель ских прог рамм, бл о ков, о б о руд о вания станций и
инстр у мент ов). Основ н ое окно у т илиты показано на рису н ке 16 .
Осно вными элементами п анели главного м еню прог раммы SIMA T IC Manager
являются разделы F ile, PLC, V iew , Opt i o ns, Window и He l p, со держание кото рых зав исит
от тек у щег о окна.
На панели инстру менто в вынесены наиб о лее часто использ у емые кнопки.
Вначале рассмо трим стру кт уру п ро екта в SIMATIC Ma na ger, ко торая показа на рису нке
Данные хранятся в проекте в в иде объектов. Объекты в п роекте разме щаются в
древов идной стру кт уре, ко торая показана в лево й части рису нке 17. Она по добна
струк т уре, испол ьзу емо й в Win do ws Ex plore r. Различаются то лько иконки о бъектов.
Содержимо е п равой части о кна S IMA T IC Manager з ависит о т выбранного в левой части
На само м верхнем уровне, к о торый ( см. ри су нке 17) называется S7_Pro1,
располо жен сам проект. Каждый проект пред став ляет базу , в ко то рой хр анятся все
от носящиеся к нему данны е. Элемент ами проекта являются сети и их элементы – станц ии
и другие у з лы. В данном примере проект S 7 _Pro1 со держит многоточечный интерфейс
MPI(1), к к о тором у по дключена одна станция SIMA T IC 300 Stati o n.
Меню и пан е ль инстр ументов SIMATI C Manager
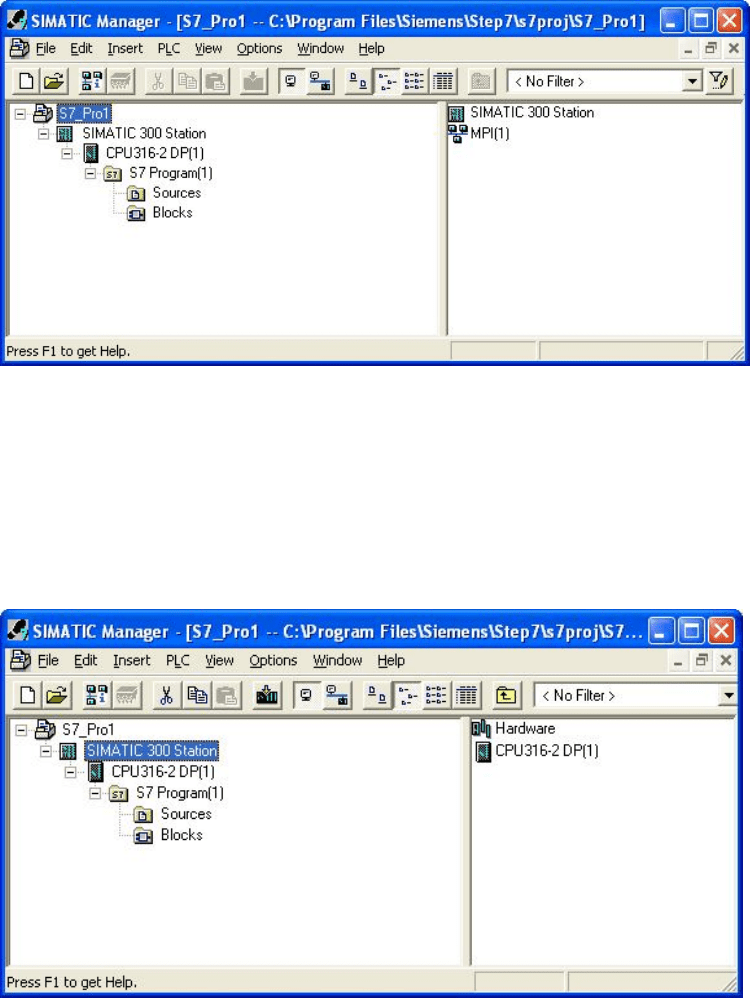
Стр уктура про е кта в SI MATIC Manage r
На в то ром у ро вн е, который показан на рис унке 18, находятся станци и, ко торые
являются исходным и о бъектами для конфиг у риро вания аппарату ры. Здесь хранится
инфо рмация о к он фигу рации ап паратуры и параметрах мо д у л ей. На рис унке 18 уровень
станций содержит один элемент – SIMATIC 300 St ati o n, ко торый в с во ю очередь содержи т
конт роллер CPU316-2DP(1). Дру го е оборудо вание можно просматривать утилитой
Уро в ень станц ии в SI MATIC Manag er
В сво ю очередь, п роцес сор CPU316-2DP(1) с одержит по льз о вательские пр ог раммы,
в данном слу чае S7 Progr am (1), которые могу т быть н аписаны в виде бл о ков Bl o cks и ли
исходных кодо в Sources . Последующие у ро вн и зав исят о т с о держимого предыду щ их.
На рис у нке 19 п оказан один из пример о в у ро в ня Bl ocks
Осно вными бл о ками, которы е исп оль зу ются в ST EP 7, являются:
а) о рганизационный бло к , напри мер OB1, ко торый является о сновной циклически
испо лняем о й прог рамм о й;
б) ф у нкция, напри мер FC1, прим еняемая для замены типовых или часто
повторяющ ихся блок о в ;
в) фу нкцио нальный бл о к, напри мер FB1, в отличие о т фу нкци и и меет отдельную
память в глобальном пространств е, называему ю бло ко м данных , за счет чего
фу н кцио нальный блок может сохранять сво и переменные в о б щ ем а дресном
про странстве;

г) блоки данны х, н апример DB1, наличие ко торых о бу словл ено гарвард ско й
арх итект у рой контроллеров.
Уро в ень б л ок ов
5.2 СОЗДАНИЕ ПРОЕКТА В SIMATIC MANAGER
Рассмо трим основ ные этапы с о здания пр о екта с по мощью м астера « New Pr o je ct
Wiz ar d», ко торый находится в разделе «Fil e » г лавно го меню у тили ты SI MA TI C Manager.
Создание проекта состо ит из четырех ш агов, которы е демонстриру ются на ри сунках 20-
Перв ый ш аг создани я про екта
В перво м окне, показанном на рису нке 20, по льз о вателю предлагается выбрать
струк т уру п роекта по у мо лчанию, по казанную в дву х окнах, нажав кнопку «Finish», или
про д о лжить пош аг о во е создание про екта, н ажав кно пку « Ne xt». При в ыбо ре п ошагового
режима по является вто р ое окно, демонстриру е мо е на рису нк е 21, в ко то ром предлагается
выбрать тип пр о цессора (пр о цессо р ов) из сп иска и у стано ви ть ег о M P I-адре с – адрес
по дключе н ия к мн о гото чечн ому интерфейсу (Mul t i Po in t I nterf ace).
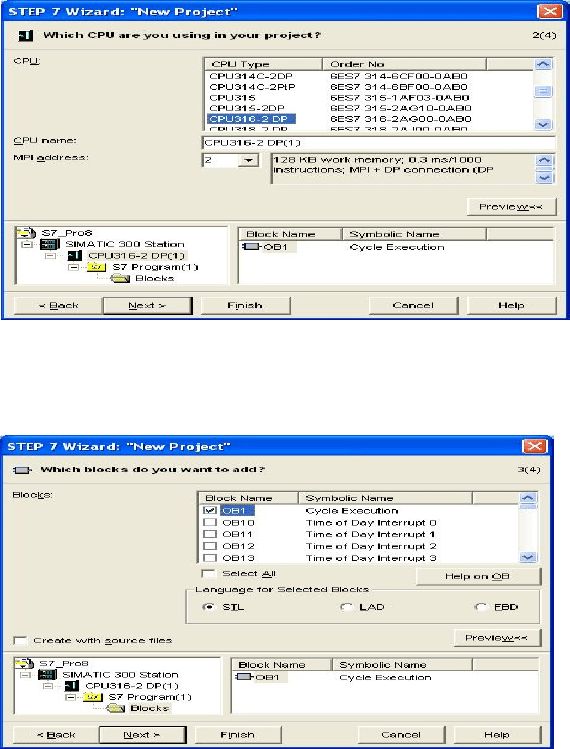
Второ й ш аг при создании про екта
Нажав кнопку « Ne xt», м ож но перейти к третьем у шаг у , кото рый п о ясняется на
рис у нке 22.
Третий ш аг при со здании про екта
На т ретьем этапе м ожно выбрать тип организ ационных бло к о в, ко т о рые
планируется испо льзовать в программе, напри м ер: блок OB1 «Cy c le E xecut i o n» – о значает
циклически исполн яему ю про грамм у ; блок OB10 « T im e o f Da y I n t errupt» – о значает
прерывани е, вызываемое по в ремени су то к; бл ок OB20 «Time Delay I nt errupt» – озн ачает
прерывани е, вы зываемое по истечении заданного в ременн о го интервала; блок OB30
«Cy c le Int errupt » – это циклически выз ыва ем ое п рерывание; бло к OB40 «Hardware
Interr up t 1» – прог рамма, в ып о лн яемая по при ходу прерыв ания о т внешней аппарату ры ;
блок OB60 « Mu l t ico m put in g Int errupt» – предназначен для прерывани й, вызываемых
различным и способами. Кром е того, су щес твует ряд блоко в, предназначенны х для
обработ ки ошибок, таких как ош ибка таймера (OB80 «C ycle T im e Fau l t »), о шибка системы
питания (OB81 «Power Supply Fau l t »), ош ибка ввода-в ыв о да (OB 82 «I/O Po in t F au l t »),
ошибка про цессора (OB84 «CPU Fault » ), ош ибк а загр у зки о рг анизационного блока (OB85
«O B Not L o aded Fau l t »), о тсу тствие кон такта в соедини тельн о м разъеме (OB86 «Loss o f
Rack Fau l t »), о ши бка со единения (OB87 «Communicat i o n Fau l t »). Т акже су щ еств ует три
блока для перезапуска: по лный перезапу ск (OB100 «C o m plet e R est art»); обычны й
перезап у ск ( OB101 «Restart»); холо дный перезапу ск (OB102 «Co l d R estart »). Последние
два блока – оши бка прог раммир ов ания контрол лера (OB121 «Programmi ng E rror ») и
ошибка до сту па к бло ку (OB122 «Module A c cess Er ror» ) .
Источник: www.studmed.ru