


Если вы хотите собрать или находитесь в процессе создания собственного станка с ЧПУ, то, скорее всего, вы встретите термин GRBL. Итак, в этом руководстве мы узнаем, что такое GRBL, как установить и как использовать его для управления вашим станком с ЧПУ на базе Arduino.
Кроме того, мы узнаем, как использовать Universal G-code Sender, популярное программное обеспечение контроллера GRBL с открытым исходным кодом.
Что такое GRBL?
GRBL — это программное обеспечение или прошивка с открытым исходным кодом, которая позволяет управлять движением для станков с ЧПУ. Мы можем легко установить прошивку GRBL на Arduino и сразу же получить недорогой высокопроизводительный контроллер ЧПУ. GRBL использует G-код в качестве ввода и выводит управление движением через Arduino.
Arduino ЧПУ программы. Grbl controller | UniversalGcodeSender | JCNC
Для лучшего понимания мы можем взглянуть на следующую схему:

Из схемы мы можем видеть место GRBL в принципе работы станка с ЧПУ. Это прошивка, которую нам нужно установить или загрузить в Arduino, чтобы она могла управлять шаговыми двигателями станка с ЧПУ. Другими словами, функция прошивки GRBL заключается в переводе G-кода в движение двигателя.
Требуемое оборудование
- Arduino — Как мы уже говорили, нам понадобится Arduino для установки GRBL. В частности, нам нужна плата Arduino на базе Atmega 328, а это означает, что мы можем использовать либо Arduino UNO, либо Nano.
- Шаговые двигатели. Очевидно, что шаговые двигатели обеспечивают движение машины.
- Драйверы — для управления шаговыми двигателями нам нужны драйверы, и распространенный выбор, когда дело доходит до небольших станков с ЧПУ DIY (использующих шаговые двигатели NEMA 14 или 17), — это драйверы A4988 или DRV8825.
- Arduino CNC Shield — для подключения шаговых драйверов к Arduino самый простой способ — использовать Arduino CNC Shield. Он использует все контакты Arduino и обеспечивает простой способ подключения всего, шаговых двигателей, шпинделя / лазера, концевых выключателей, охлаждающего вентилятора и т. д.
Обратите внимание, что это только основные электронные компоненты, которые нам нужны, чтобы понять, как работает станок с ЧПУ.
В качестве примера того, как все должно быть соединено, мы можем взглянуть на одну из машин для резки пенопласта с ЧПУ сделанную своими руками.

Здесь вы можете проверить и получить основные электронные компоненты, необходимые для сборки этого станка с ЧПУ:
- Шаговый двигатель — NEMA 17
- Шаговый драйвер A4988
- Arduino CNC Shield
- Arduino Uno
Главный инструмент этого станка с ЧПУ — это горячая проволока, которая может легко расплавить или прорезать пенополистирол и придать любую форму, которую мы хотим.
Как установить GRBL
Во-первых, чтобы иметь возможность установить или загрузить GRBL в Arduino, нам понадобится Arduino IDE.

Загрузите файл.ZIP и выполните следующие действия:
- Откройте файл grbl-master.zip и извлеките файлы
- Откройте IDE Arduino, перейдите в Sketch> Включить библиотеку> Добавить библиотеку.ZIP…

Перейдите в извлеченную папку «grbl-master», в ней выберите папку «grbl» и щелкните открытый файл. Теперь нам нужно использовать GRBL как библиотеку Arduino.

- Затем перейдите в Файл> Примеры> grbl> grblUpload. Откроется новый скетч, и нам нужно загрузить его на плату Arduino. Код может выглядеть странно, так как это всего лишь одна строка, но не беспокойтесь, все происходит в фоновом режиме в библиотеке. Итак, нам просто нужно выбрать плату Arduino, COM-порт и нажать эту кнопку загрузки, и все готово.
Конфигурация GRBL
На этом этапе мы должны настроить GRBL для нашей машины. Мы можем сделать это через Serial Monitor IDE Arduino. Как только мы откроем Serial Monitor, мы получим сообщение типа «Grbl 1.1h [‘$’ for help]». Если вы не видите это сообщение, убедитесь, что вы изменили скорость передачи данных на 115200.
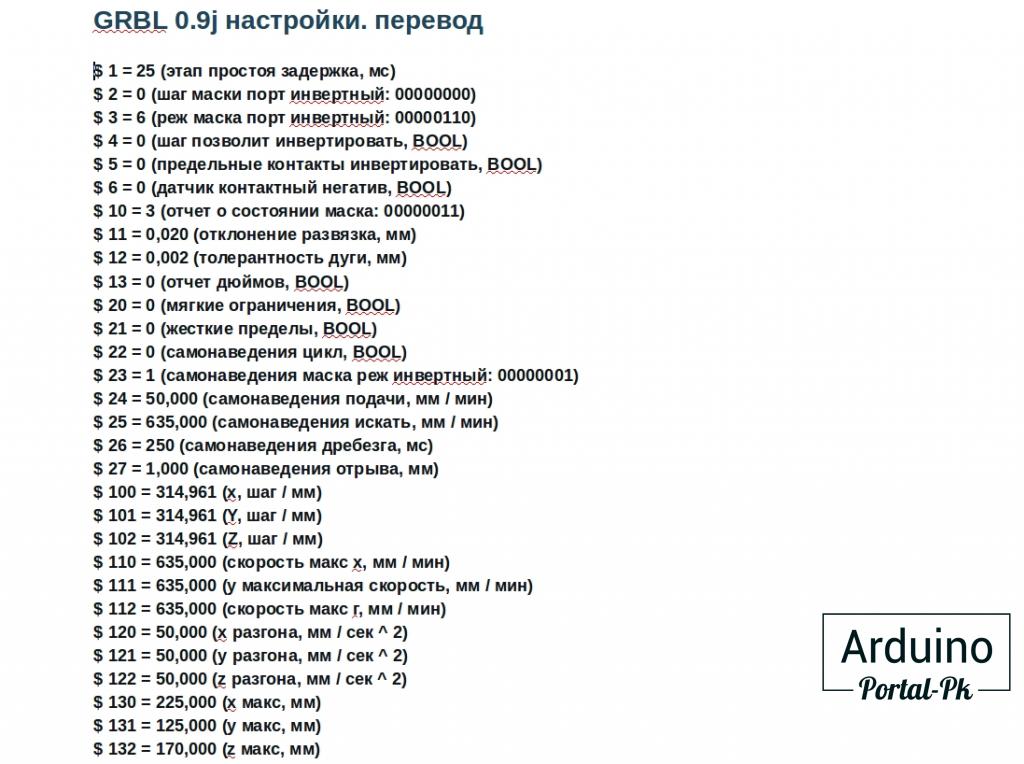
Если мы введем «$$», мы получим список команд или текущих настроек, и они будут выглядеть примерно так:
$100 = 250 000 (x, шаг / мм)
$101 = 250 000 (y, шаг / мм)
$102 = 3200 000 (z, шаг / мм)
$110 = 500.000 (x макс. Скорость, мм / мин)
$111 = 500.000 (y макс. Скорость, мм / мин)
$ 112 = 500.000 (макс. скорость z, мм / мин)
$ 120 = 10.000 (ускорение x, мм / сек ^ 2)
$ 121 = 10.000 (ускорение y, мм / сек ^ 2)
$ 122 = 10.000 (ускорение z, мм / сек ^ 2)
Все эти команды могут или должны быть настроены в соответствии с нашим станком с ЧПУ. Например, с первой командой, $100 = 250,000 (x, шаг / мм), мы можем отрегулировать шаги на мм машины, или мы можем указать, сколько шагов должен сделать двигатель, чтобы наша ось X сместилась на 1 мм.
Однако я бы посоветовал оставить эти настройки как есть. Есть более простой способ настроить их в соответствии с нашей машиной с помощью программного обеспечения контроллера, который мы объясним в следующем разделе.
Контроллер GRBL
Итак, после того, как мы установили прошивку GRBL, теперь наш Arduino знает, как читать G-код и как управлять станком с ЧПУ в соответствии с ним. Однако, чтобы отправить G-код на Arduino, нам нужен какой-то интерфейс или программное обеспечение контроллера, которое сообщит Arduino, что делать. На самом деле для этого существует множество программ как с открытым кодом, так и коммерческих, подробно о них вы можете узнать из нашей статьи. Конечно, мы будем придерживаться открытого исходного кода, поэтому в качестве примера мы будем использовать Univarsal G-code Sender.

Как использовать универсальный отправитель G-кода
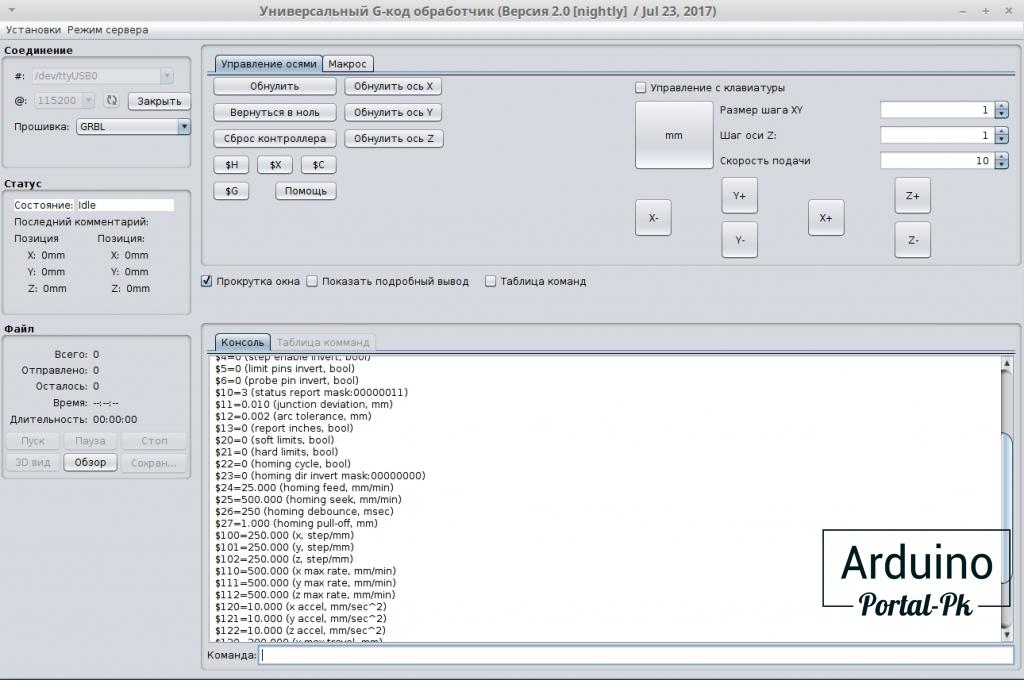
В этом примере я буду использовать версию платформы 2.0. После загрузки нам нужно извлечь zip-файл, перейти в папку «bin» и открыть любой из исполняемых файлов «ugsplatfrom». На самом деле это программа JAVA, поэтому для запуска этой программы сначала необходимо установить среду выполнения JAVA.
Как только мы откроем универсальный отправитель G-кода, сначала нам нужно настроить машину и настроить параметры GRBL, показанные ранее. Для этой цели мы воспользуемся мастером настройки UGS, который намного удобнее, чем вводить команды вручную через Serial Monitor IDE Arduino.

Первый шаг здесь — выбрать скорость передачи, которая должна быть 115200, и порт, к которому подключен наш Arduino. Как только мы подключим Univarsal G-code Sender к Arduino, на следующем шаге мы сможем проверить направление движения двигателей.

При необходимости мы можем изменить направление с помощью мастера или вручную переключить соединение двигателя на Arduino CNC Shield.
На следующем шаге мы можем настроить параметр шагов / мм, о котором мы упоминали ранее. Здесь гораздо проще понять, как его настроить, потому что мастер настройки вычислит и сообщит нам, до какого значения мы должны обновить параметр.

Значение по умолчанию — 250 шагов / мм. Это означает, что если мы нажмем кнопку перемещения «x +», двигатель сделает 250 шагов. Теперь, в зависимости от количества физических шагов двигателя, выбранного шагового разрешения и типа передачи, машина будет перемещаться на некоторое расстояние. Используя линейку, мы можем измерить фактическое перемещение машины и ввести это значение в поле «Фактическое перемещение». На основании этого мастер рассчитает и сообщит нам, на какое значение следует изменить параметр шаги / мм.

В моем случае станок сдвинулся на 3 мм. В соответствии с этим мастер предложил обновить параметр шаги / мм до значения 83.

После обновления этого значения станок теперь движется правильно, 1 мм в программном обеспечении означает 1 мм для станка с ЧПУ.

В консоли UGS, когда мы выполняем каждое действие, мы можем видеть выполняемые команды. Мы можем заметить, что, обновив параметр steps / mm, программа UGS фактически отправила в Arduino или прошивку GRBL команду, о которой мы упоминали ранее. Это было значение по умолчанию: $100 = 250 000 (x, шаг / мм), и теперь мы обновили значение до 83 шагов на мм: $100 = 83.
На следующем этапе мы можем включить концевые выключатели и проверить, правильно ли они работают.

В зависимости от того, являются ли они нормально разомкнутым или нормально замкнутым соединением, мы также можем инвертировать их здесь.
Здесь стоит отметить, что иногда нам нужно отключить концевой выключатель оси Z. Так было сj станком для резки пенопласта с ЧПУ, где мне не нужен был концевой выключатель оси Z, и мне пришлось отключить его, чтобы иметь возможность правильно разместить станок. Итак, для этого нам нужно отредактировать файл config.h, который находится в папке библиотеки Arduino (или Documents Arduino libraries).

Здесь нам нужно найти линии цикла возврата в исходное положение и прокомментировать установку по умолчанию для 3-х осевого станка с ЧПУ и раскомментировать настройку для 2-х осевых станков. Чтобы изменения вступили в силу, нам нужно сохранить файл и повторно загрузить эскиз grblUpload на нашу плату Arduino.
Тем не менее, на следующем шаге мы можем либо включить, либо отключить возвращение в исходное положение фрезерной обработки с ЧПУ.

Используя кнопку «Возврат в исходное положение», машина начнет движение к концевым выключателям. Если все пойдет наоборот, мы можем легко изменить направление.
Наконец, на последнем шаге мастера настройки мы можем включить мягкие ограничения для нашего станка с ЧПУ.

Мягкие ограничения не позволяют машине выходить за пределы установленной рабочей зоны.
Заключение
Итак, благодаря прошивке GRBL и Arduino мы можем легко настроить и запустить наш DIY-станок с ЧПУ. Конечно, в этом руководстве мы рассмотрели только основы, но я думаю, что этого было достаточно, чтобы понять, как все работает и как запустить и запустить ваш первый станок с ЧПУ.

Конечно, доступно множество других настроек и функций, так как GRBL действительно совместима с прошивкой контроллера ЧПУ. Все это подробно объясняется в документации GRBL, так что вы всегда можете проверить их на их вики-странице на github.com.
Кроме того, существует множество других программ контроллера GRBL с открытым исходным кодом, таких как Universal G-code Sender, и вот несколько: GRBLweb (веб-браузер), GrblPanel (графический интерфейс Windows), grblControl (графический интерфейс Windows / Linux), Easel (на основе браузера) и т. д. Вы должны изучить их и посмотреть, какой из них вам больше подходит.
Источник: cnc-maniac.ru
Настройка прошивки Grbl ЧПУ станка. Калибровка ЧПУ

Собрать ЧПУ станок на Arduino + CNC shield v 3 и сделать первый пробный запуск это пол дела. Нужно еще правильно настроить прошивку Grbl 0.9j . Скачать полную прошивку можете тут grbl.zip. На официальном сайтеGrbl 0.9j доступна только в .hex формате. Что не очень удобно. Но можно скачать код для Arduino IDE версии Grbl v1.1. Данная версия не сильно отличается от Grbl 0.9j .
Для тех кто только планирует сделать самодельный фрезерный станок с ЧПУ рекомендую почитать вот эти статьи:
Для управления ЧПУ станком я использую программу UniversalG-Code Sender.
Данная программа работает на всех распространенных операционных системах. Еще одни плюс для меня, это то что Universal G-Code Sender отлично работает как с лазерным гравировальным станком с ЧПУ так и с фрезерным ЧПУ станком.
Процесс настройки описывать не буду. Весь процесс рассказываю достаточно подробно в видео
После настройки станка нужно провести калибровку. Вы скажите: «Мы все рассчитали и погрешностей не должно быть». Но ни тут то было. Погрешность может быть из за ряда причин. Поэтому необходимо произвести калибровку фрезерного ЧПУ станка.
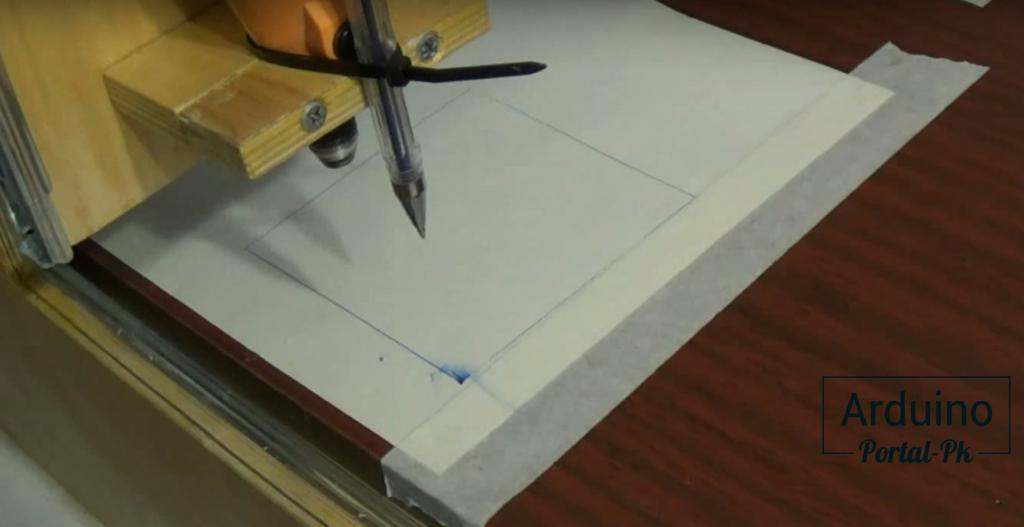
Калибровка достаточно простая. Рисуем прямоугольники 100 на 100 мм. И производим расчеты.
Как рассчитать рассказываю в видео.
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
Спасибо за внимание!
Понравилась статья? Поделитесь ею с друзьями:
Источник: portal-pk.ru
Настройка лазера для LightBurn

Если у вас есть DSP-контроллер, либо гравер Gistroy, вам не нужно ничего делать, чтобы настроить вашу машину для использования с LightBurn, и вы можете перейти к пошаговому руководству для начинающих.
Если у вас есть контроллер GCode, особенно если вы также используете свою систему в качестве ЧПУ или 3D-принтера, может потребоваться дополнительная конфигурация.
Важно! Если у Вас станок Gistroy данные значение трогать и менять не нужно.
LightBurn также может быть сконфигурирован для управления несколькими лазерами, и для каждого устройства сохраняются настройки. Если вы не выберете один из них, нам некуда будет поместить эти настройки, и ряд функций в LightBurn не будет работать, пока он не будет настроен.
Настройка GRBL контроллеров
Common Grbl setups
Если у вас есть система на основе GCode, например, Shapeoko, Eleksmaker, X-Carve или Acro, вам, возможно, придется внести некоторые простые изменения, чтобы получить максимум от LightBurn.
- Вам может потребоваться изменить значение максимального числа оборотов шпинделя ($30) на значение по умолчанию в LightBurn (1000) или наоборот. Это значение в LightBurn называется «S-Value Max» в «Device Settings» (Настройках устройства).
- Вам может понадобиться включить «Laser Mode» (Режим лазера), если у вас более поздняя версия GRBL (предыдущая версия — 1.1f) ($32=1).
- Если у вас более старая версия GRBL (до 1.1f), настоятельно рекомендуется обновить прошивку, так как «Laser Mode» (Режим лазера) также предотвращает приостановку работы машины при любом перепаде напряжения. Пауза, которая происходит в старых версиях или при отсутствии «Laser Mode» (Режим лазера), приводит к появлению чрезмерно больших участков пережога при гравировке изображений.
- Если ваш станок использует отрицательные координаты рабочего пространства, вам необходимо применить смещение рабочего пространства (G10 L2 P1 xx yy).
- УУстановите, что отчет о состоянии станка будет относиться к началу координат рабочего пространства, а не к началу координат станка ($10=0).
- Убедитесь, что контроллер сообщает о положении в мм, как предполагает LightBurn ($13=0).
- Если ваш станок не оснащен переключателями наведения (также называемыми концевыми выключателями), вам придется наводить его вручную, если вы хотите использовать режимы «Absolute Coords» (Абсолютные координаты) или «User Origin» (Пользовательское начало координат).
Прошивка Grbl изначально была разработана для станков с ЧПУ и 3D-принтеров, а совсем недавно была добавлена поддержка лазера. Он легко настраивается, и это одновременно и преимущество, и недостаток. «Стандартный» способ настройки станка с ЧПУ несколько отличается от того, как часто настраиваются лазерные станки. К счастью, это легко изменить, и легко переключиться с одного на другое.
Более поздние версии Grbl (1.1 f и выше) поддерживают две вещи, которые невероятно полезны для лазеров. Первая — это «Laser Mode» (Режим лазера), включаемый установкой $32=1 в настройках прошивки. «Laser Mode» (Режим лазера) устраняет паузы, возникающие при изменении выходной мощности, потому что Grbl знает, что он управляет лазером, который реагирует мгновенно, а не ждет, пока шпиндель изменит обороты.
Вторая функция называется режимом переменной мощности, или командой M4. В этом режиме Grbl регулирует мощность лазера по мере ускорения и замедления станка, что обеспечивает очень стабильную резку и маркировку. Более старые версии Grbl не имеют этой функции и просто работают с постоянной мощностью лазера в течение всего времени резки. Поскольку машине приходится замедляться, чтобы сделать острые углы, это означает, что углы получаются пережженными, в то время как длинные прямые линии получаются более светлыми.
Преимуществом является также то, что при полной остановке лазера луч выключается (нулевая скорость равна нулевой мощности), то есть приостановка работы автоматически выключает лазер. Это не всегда справедливо для других версий Grbl.
Если вы еще не используете Grbl 1.1f (или более позднюю версию) на своем контроллере, мы настоятельно рекомендуем его для использования лазера. Если такой возможности нет, ничего страшного, но результаты будут не такими хорошими, а при приостановке работы лазера есть риск оставить луч включенным и испортить работу.
Источник: gistroy.ru