
Simulink – это среда моделирования и проектирования на основе моделей для динамических и встроенных систем, интегрированная с MATLAB. Simulink, также разработанный MathWorks, представляет собой инструмент языка графического программирования потоков данных для моделирования, моделирования и анализа многодоменных динамических систем. В основном это графический инструмент для построения блок-схем с настраиваемым набором библиотек блоков.
Это позволяет включать алгоритмы MATLAB в модели, а также экспортировать результаты моделирования в MATLAB для дальнейшего анализа.
- системный дизайн
- моделирование
- автоматическая генерация кода
- тестирование и проверка встроенных систем
Существует несколько других дополнительных продуктов, предоставляемых MathWorks и сторонними аппаратными и программными продуктами, которые доступны для использования с Simulink.
Следующий список дает краткое описание некоторых из них –
- Stateflow позволяет разрабатывать конечные автоматы и блок-схемы.
- Simulink Coder позволяет генерировать исходный код на C для автоматической реализации систем в реальном времени.
- xPC Target вместе с системами реального времени на базе x86 обеспечивают среду для имитации и тестирования моделей Simulink и Stateflow в реальном времени на физической системе.
- Встроенный кодер поддерживает определенные встроенные цели.
- HDL Coder позволяет автоматически генерировать синтезируемые VHDL и Verilog.
- SimEvents предоставляет библиотеку графических строительных блоков для моделирования систем массового обслуживания.
Stateflow позволяет разрабатывать конечные автоматы и блок-схемы.
Simulink 01 Начало работы
Simulink Coder позволяет генерировать исходный код на C для автоматической реализации систем в реальном времени.
xPC Target вместе с системами реального времени на базе x86 обеспечивают среду для имитации и тестирования моделей Simulink и Stateflow в реальном времени на физической системе.
Встроенный кодер поддерживает определенные встроенные цели.
HDL Coder позволяет автоматически генерировать синтезируемые VHDL и Verilog.
SimEvents предоставляет библиотеку графических строительных блоков для моделирования систем массового обслуживания.
Simulink способен систематически проверять и проверять модели посредством проверки стиля моделирования, отслеживания требований и анализа охвата модели.
Simulink Design Verifier позволяет выявлять ошибки проектирования и генерировать сценарии тестирования для проверки модели.
Использование Simulink
Чтобы открыть Simulink, введите рабочее пространство MATLAB –
simulink
Simulink открывается с помощью браузера библиотеки . Браузер библиотеки используется для построения имитационных моделей.
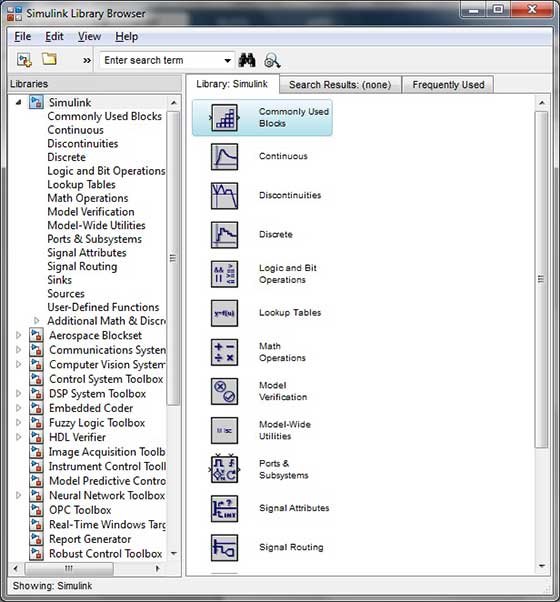
В левой части окна вы найдете несколько библиотек, распределенных по категориям на основе различных систем, щелкнув по каждой из них, вы увидите блоки дизайна на правой панели окна.
GMP – 3. Основы MATLAB Simulink
Модели зданий
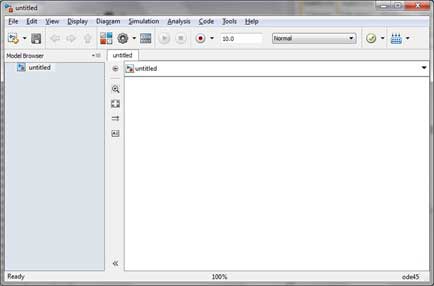
Чтобы создать новую модель, нажмите кнопку « Создать» на панели инструментов браузера библиотеки. Это открывает новое безымянное окно модели.
Модель Simulink – это блок-схема.
Элементы модели добавляются путем выбора соответствующих элементов в браузере библиотеки и перетаскивания их в окно модели.
Кроме того, вы можете скопировать элементы модели и вставить их в окно модели.
Примеры
Перетащите элементы из библиотеки Simulink, чтобы создать свой проект.
В этом примере для моделирования будут использоваться два блока – Источник (сигнал) и Раковина (область). Генератор сигналов (источник) генерирует аналоговый сигнал, который затем будет графически визуализирован областью действия (приемником).
Начните с перетаскивания необходимых блоков из библиотеки в окно проекта. Затем соедините блоки вместе, что можно сделать, перетаскивая соединители из точек соединения одного блока в точки другого.
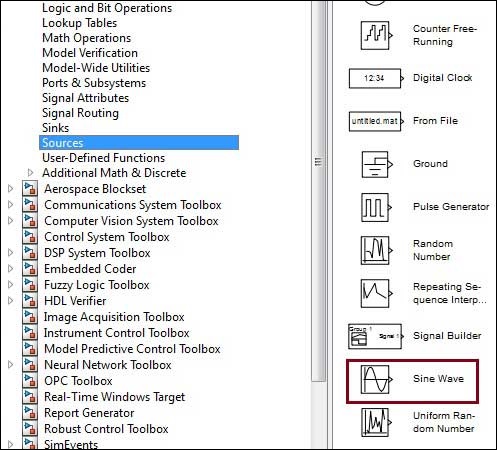
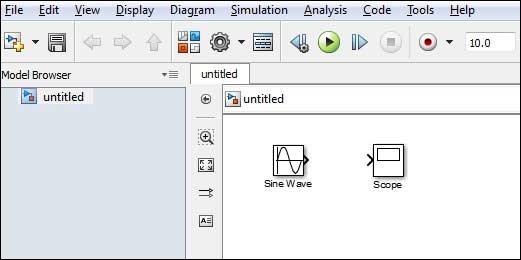
Давайте перетащим блок «Синусоида» в модель.
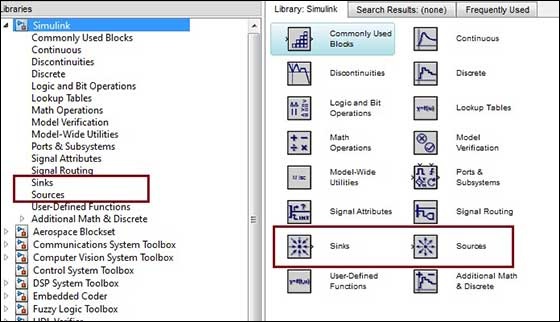
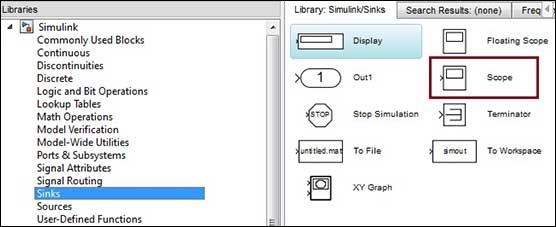
Выберите «Sinks» из библиотеки и перетащите блок «Scope» в модель.
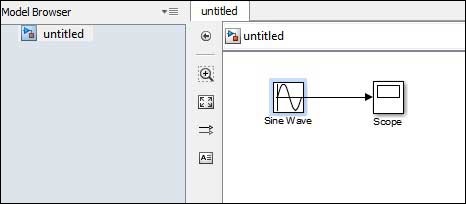
Перетащите сигнальную линию с выхода блока синусоидальной волны на вход блока Scope.
Запустите симуляцию, нажав кнопку « Выполнить », сохраняя все параметры по умолчанию (вы можете изменить их из меню симуляции)
Вы должны получить ниже график из области видимости.
Источник: coderlessons.com
Начало работы с simulink в Matlab: проектирование модели

За последние несколько лет Simulink стал наиболее часто используемым пакетом инженерного программного обеспечения в академиях и отраслях. Simulink интегрирован с программным обеспечением MATLAB, которое используется для моделирования, моделирования и анализа динамических систем. Simulink предоставляет графический интерфейс пользователя (GUI) в виде блок-схем для построения вашей модели, как если бы вы строили с помощью карандаша и бумаги.

Чтобы понять Simulink, вы можете рассмотреть простой пример,
Здесь, в приведенном выше примере мы генерируем синусоидальную волну из блока синусоидальной волны и усиливаем ее коэффициентом усиления, который вы непосредственно проверяете в Simulink, дважды щелкая блок области видимости.
Если вы новичок в MATLAB, сначала изучите терминологию, используемую в MATLAB, и начните с мигания светодиода.
Как запустить Simulink в MATLAB?
Чтобы открыть Simulink в MATLAB, вы можете просто щелкнуть по кнопке Simulink из строки меню MATLAB, как показано на изображении ниже

В противном случае вы можете просто использовать командное окно, чтобы открыть Simulink. Просто напишите «simulink» в командной строке и нажмите Enter.
simulink

Ниже показано первое окно, которое появляется после открытия Simulink:

Как вы можете видеть на изображении, существуют различные варианты выполнения различных задач, например, вы можете создать свой шаблон, пустую модель, пустую библиотеку и многие другие.
Когда нам нужно создать новую модель, мы выбираем опцию « Пустая модель» , дважды щелкая по ней. Пустое окно модели, которое мы также можем назвать окном Simulink, выглядит как на изображении ниже.

Браузер библиотеки Simulink
Браузер библиотеки Simulink содержит приемники, источники, соединители, линейные и нелинейные компоненты. Simulink намного лучше, чем другие предыдущие пакеты моделирования, которые должны формулировать уравнения в программе, в то время как в Simulink вы можете выбрать функцию и блоки, и вам просто нужно ввести значения переменных уравнений.
Чтобы открыть браузер библиотеки Simulink, вы можете просто щелкнуть кнопку браузера библиотеки в меню Simulink, как показано ниже.

Другой способ открыть браузер библиотеки Simulink — ввести команду ниже в командном окне. В команде учитывается регистр, поэтому будьте осторожны при вводе:
slLibraryBrowser

Так выглядит браузер библиотеки Simulink, в котором вы можете искать приемники, источники, соединители, линейные и нелинейные компоненты.

Запуск демонстрационной модели с MATLAB Simulink

Simulink уже содержит ряд простых и продвинутых моделей различных типов систем, таких как аудио, связь, компьютерное зрение, DSP, реальное время и многие другие, как вы можете видеть на изображении ниже,

Чтобы запустить пример или демонстрационную модель, просто дважды щелкните по ней, и появится всплывающее окно с ее моделью Simulink, как показано на изображении ниже.

После моделирования вы можете смоделировать модель, используя выбор метода интеграции, меню Simulink или командного окна. Самый простой и удобный способ — просто использовать кнопку Simulink ‘RUN’ из меню Simulink для запуска модели в Simulink, как показано на изображении ниже.

Вы также можете использовать или редактировать демонстрационную модель, если хотите.
Запуск отладчика
Simulink Debugger — это инструмент Simulink для поиска или диагностики ошибок в модели. Отладчик помогает вам проверять или запускать моделирование шаг за шагом, а также отображает состояние ввода, вывода и блока.
Чтобы запустить отладчик, вам просто нужно щелкнуть модель отладки в разделе моделирования в строке меню Simulink, как показано на изображении ниже.

Вы даже можете запустить отладчик из командного окна, просто набрав следующую команду:
sldebug (‘название модели’)

Создание модели Simulink для усилителя сигнала
Шаг 1: — Запустите Simulink от кнопки Simulink или введите «simulink» в командном окне.
Шаг 2: — Выберите « Пустую модель» из Simulink, как показано на изображении ниже.
Шаг 3: — Теперь мы собираемся построить «Модель усилителя сигнала», которая принимает входной сигнал и усиливает его с помощью коэффициента усиления.
Для модели усилителя сигнала нам понадобится блок синусоидальной волны, блок усиления и осциллограф.
Шаг 4: — Откройте браузер библиотеки, набрав «sl’LibraryBrowser» в командном окне. И выберите необходимые блоки и перетащите их в окно Simulink из окна браузера библиотеки, как показано на изображении ниже.


Шаг 5: — После размещения всех блоков в окне Simulink вы должны соединить их в соответствии с изображением, показанным ниже,
Шаг 6: — Вам необходимо изменить настройку для получения двух входных данных в области видимости, поэтому дважды щелкните область, а затем перейдите к настройке и измените « Количество входных портов» на «2», как показано на изображении ниже.

Шаг 7: — Теперь, для усиления, вы можете установить значение амплитуды синусоидальной волны и коэффициента усиления, дважды щелкнув соответствующий блок.
Шаг 8: — После завершения этого мы можем запустить нашу модель Simulink с помощью кнопки «RUN», данной в меню Simulink.
Подождите, пока Simulink скомпилирует вашу модель, которую вы можете увидеть в правом нижнем углу окна.

Шаг 9: — Теперь для получения результата дважды щелкните осциллограф, и вы сможете увидеть как входной, так и усиленный сигнал, как показано на изображении ниже,
В результате, если вы наблюдаете форму выходного сигнала, она усиливается в 3 раза.
Шаг 10: — Теперь вы можете сохранить свою модель, а также получить распечатку, расширение для дизайна Simulink — «.slx», поэтому следите за расширением при сохранении, обычно оно автоматически принимает расширение «.slx».
Вы также можете посмотреть видео, приведенное в конце, для «Создание модели с помощью MATLAB Simulink».
Моделирование системы динамического управления
Simulink используется для анализа различных сложных систем в реальном времени, связанных с трением, сопротивлением воздуха, проскальзыванием шестерен и т. Д. Эти системы очень сложны, и разработка модели для них выходит за рамки статьи. Но чтобы научиться моделировать динамическую систему управления, сам MATLAB предоставил хорошую документацию. Вы можете получить доступ к этому в руководстве по началу работы в MATLAB. Перейдите к « Моделирование динамической системы » после выбора « Начало работы» .

Вы будете перенаправлены в справочный браузер MATLAB, как показано на изображении ниже.

Полный процесс проектировали модель Simulink показан на видео ниже:
Источник: ru.amen-technologies.com
ОТС / Лабораторные (1 семестр) / Изучение пакета симулинк
5 ВВЕДЕНИЕ В SIMULINK MATLAB (Matrix Laboratory) – это пакет прикладных программ, предназначенный для решения задач технических вычислений. Рисунок 1.1 – Логотип MATLAB, выведенный на экран при помощи команды logo Как язык программирования MATLAB был разработан в конце 1970-х годов Кливом Моулером в университете Нью-Мексико.
MATLAB – это высокоуровневый интерпретируемый язык программирования, отличительной особенностью которого является оперирование с векторами и матрицами. На сегодняшний день насчитывается более одного миллиона пользователей MATLAB. Simulink – это система имитационного блочного моделирования динамических систем, являющаяся подсистемой MATLAB.
Средства моделирования Simulink основываются на программных средствах MATLAB, но позволяют обойтись без использования в явном виде языка MATLAB и создавать модели из стандартных блоков в графическом виде. При необходимости дополнительные блоки могут быть написаны пользователем как на языке MATLAB, так и на других языках (С, VHDL и др.). Визуальное представление дает возможность значительно упростить процесс создания модели, поиска ошибок, модификации модели другими пользователями, что в целом позволяет добиваться результатов гораздо быстрее, чем при использовании языка MATLAB в чистом виде. Кроме того, пользователю предоставляется возможность автоматической генерации кода на языках С, VHDL, Verilog по созданной модели, что позволяет переносить модель системы сразу после отладки на кристалл (микроконтроллеры, ПЛИС). Со многими другими возможностями MATLAB и Simulink можно познакомиться на сайте компании TheMathWorks (http://www.mathworks.com/).
6 1.1 Запуск Simulink Запустив графический интерфейс MATLAB, выполните команду simulink или запустите Simulink при помощи кнопки на верхней панели (рис. 1.2). Рисунок 1.2 – Запуск Simulink из MATLAB При запуске Simulink откроется окно Simulink Library Browser (каталог библиотеки Simulink). В левой панели окна приведен список библиотек Simulink (рис. 1.3).
Правая панель содержит три вкладки: Library (Содержание библиотеки), Search Results (Результаты поиска), Most Frequently Used Blocks (Наиболее часто используемые блоки). Во вкладке Library отображаются элементы библиотеки, выбранной в левой панели окна. В дальнейшем эти элементы могут быть использованы для создания новой модели. Для ускоренного поиска нужного блока необходимо использовать поисковую систему ( Enter search term ). Результаты поиска отображаются во второй вкладке правой панели ( Search Results ).
7 В процессе работы в Simulink формируется набор наиболее часто используемых блоков, который будет отображаться в третьей вкладке правой панели ( Most Frequently Used Blocks ). Рисунок 1.3 – Каталог библиотеки Simulink Главное меню окна каталога библиотеки Simulink содержит следующие элементы: File (Файл) – работа с файлами моделей Simulink: New (Новый) – создание нового файла модели ( Model ) или библиотеки ( Library ); Open (Открыть) – открыть ранее созданный файл; Close (Закрыть) – закрыть окно каталога библиотеки Simulink; Preferences (Настройки по умолчанию) – общие настройки Simulink (параметры шрифтов, настройки отображения графического интерфейса пользователя, начальные настройки вновь создаваемых проектов и другие).
8 Edit (Редактирование) – добавление в модель выделенного блока ( Add Selected Block to a New Model ), поиск блока в библиотеке ( Find ). View (Вид) – настройки отображения элементов библиотеки (размер шрифта, вид значков элементов и др.). Help (Помощь) – справочная система MATLAB Simulink.
Необходимо отметить, что MATLAB имеет очень хорошую встроенную систему документации, которая постоянно совершенствуется и дополняется новой информацией. Знание технического английского языка и чтение документации MATLAB – это лучший способ разобраться во всем многообразии функций и блоков.
Рисунок 1.4 – Описание элемента стандартной библиотеки Simulink При двойном нажатии левой кнопкой мыши по интересующему блоку открывается окно параметров, в котором приведено краткое описание блока и перечислены его параметры (рис. 1.4). На данном этапе параметры блока доступны только для чтения. После перемещения блока в модель появится возможность их изменения. При необходимости можно воспользоваться кнопкой Help для открытия подробного описания блока в системе документации MATLAB.
9 1.2 Создание модели Для создания новой модели выполните команду главного меню File , New , Model (рис. 1.5) или нажмите Ctrl+N . Рисунок 1.5 – Создание новой модели По команде откроется новое безымянное окно ( Untitled ) модели (рис. 1.6). Рисунок 1.6 – Пустое окно новой модели Simulink
10 Прежде чем приступать к созданию модели, необходимо настроить параметры моделирования. Выполните команду главного меню Simulation , Configuration Parameters (Моделирование, Параметры конфигурации) или на- жмите Ctrl+E . Рисунок 1.7 – Параметры конфигурации Процесс настройки заключается в задании параметров решающего мо- дуля ( Solver ): Simulation time (Время моделирования) – задается временной интервал моделирования в секундах. Левая граница по умолчанию равна нулю, правая может принимать любое значение, в том числе и бесконечность ( inf ). В случае, если начальное и конечное значения совпадают, будет выполнен только один шаг моделирования. Solver Options (Параметры решающего модуля) – параметры модуля, реализующего один из методов численного интегрирования обыкновенных дифференциальных уравнений. Выделяются два типа ( Type ) решающих модулей: с фиксированным шагом моделирования ( Fixed-step ) и с переменным шагом моделирования ( Variable-step ). Выбор второго варианта позволяет системе адаптивно изменять временной шаг моделирования в процессе работы. При этом можно задать величины минимального и максимального шага мо-
11 делирования, а также начального шага моделирования в секундах ( Max step size, Min step size и Initial step size ). При необходимости можно задать относительную и абсолютную погрешности численного метода решения дифферен- циальных уравнений ( Relative tolerance и Absolute tolerance ). В выпадающем списке Solver имеется возможность задать тип решающего модуля для моделирования аналоговых систем ( ode … ) или выбрать решающий модуль для моделирования дискретных систем ( Discrete (no continuous state) ). На первое время рекомендуется оставить параметры конфигурации по умолчанию, изменяя лишь правую границу времени моделирования. При необходимости можно более подробно ознакомиться с параметрами конфигурации в справочной системе MATLAB Simulink.
Рисунок 1.7 – Результаты поиска по слову «Scope» Сохраните настройки системы и перейдите к окну библиотеки Simulink. Введите в строке поиска ( Enter search term ) Scope (осциллограф) и нажмите клавишу Enter. Во вкладке Found: ‘Scope’ отражаются результаты поиска, сгруппированные по библиотекам (рис. 1.7). В базовой библиотеке Simulink блок Scope найден дважды: в разделе Commonly Used Blocks (наиболее часто используемые блоки) и Sinks (средства анализа сигналов) . Разумеется, это один и тот же блок осциллографа. В списке найденных блоков также присут-
12 ствует часто используемый блок Spectrum Scope (Анализатор спектра), находящийся в библиотеке цифровой обработки сигналов ( Digital Signal Processing ). Добавить выбранный блок в модель можно несколькими способами: перетащив его на лист модели или выбрав пункт Add To Untitled контекстного меню , нажав правой кнопкой мыши на блоке. Аналогичным образом добавьте блок Sine Wave из раздела Sources (Источники сигнала).
Соединение блоков между собой может осуществляться двумя способами. Ручной способ: наведя курсор мыши на выход источника сигнала, зажмите левую кнопку мыши и проведите линию до входа осциллографа. Автоматический способ: выделив блок источника сигнала однократным нажатием левой кнопки мыши, зажмите кнопку Ctrl и нажмите левой кнопкой мыши на второй блок, соединение будет выполнено автоматически. Для настройки параметров генератора синусоидального сигнала двойным щелчком мыши откройте окно параметров блока (рис. 1.9.). Рисунок 1.9 – Настройка параметров блока Sine Wave
13 Установите значение параметра Sine type Sample based (Метод формирования сигнала – Дискретное представление). Параметр Sample time определяет период дискретизации сигнала, для примера установим его равным одной секунде. Таким образом, при 10 выборках на один период синусоиды ( Samples per period ) и при периоде дискретизации в 1 секунду, период гармонического колебания составит 10 секунд.
Запустите процесс моделирования Simulation, Start ( Ctrl+T ) на временном промежутке 0…10 сек. Двойным щелчком мыши откройте окно осциллографа (рис. 1.10).
Рисунок 1.10 – Пример моделирования источника дискретного синусоидального сигнала Как видно на рисунке 1.10, осциллограмма сигнала соответствует заданным параметрам гармонического колебания в настройках блока Sine Wave . При необходимости можно увеличить участок с требуемым фрагментом сигнала при помощи кнопок управления окна Scope . Кнопка Autoscale позволяет автоматически подобрать масштаб по двум осям для отображения всего накопленного сигнала. При помощи кнопок Zoom X – axis и Zoom Y – axis имеется возможность изменения масштаба только по одной из координат. В настройках блока Scope можно задать количество входов осциллографа ( Number of axis ), параметры децимации входного сигнала ( Decimation , прореживание выборок), настройки объема буфера хранения информации ( History, Limit data points to last ) и другие.
14 1.3 Библиотеки Simulink Формирование сигналов в Simulink осуществляется при помощи генераторов сигналов Sources (рис. 1.11). Рисунок 1.11 – Библиотека источников сигнала В библиотеку входят следующие блоки: Band-Limited White Noise – генератор нормального белого шума с равномерной финитной спектральной плотностью мощности и заданным временем корреляции для аналоговых систем; Chirp signal – генератор синусоидального колебания с линейно возрастающей мгновенной частотой; Clock – формирователь аналогового сигнала текущего времени моделирования (в соответствии с шагом моделирования); Constant – источник постоянного сигнала; Counter Free-Running – формирователь сигнала на основе N -разрядного счетчика и со сбросом по переполнению; Counter Limited – формирователь сигнала на основе счетчика с произвольным значением сброса; Digital Clock – формирователь дискретного сигнала текущего времени моделирования (в соответствии с шагом моделирования);
Источник: studfile.net