
Устройства управления (УУ) – это часть вычислительной машины, которая организует автоматическое выполнение программ и функционирование вычислительной машины как единой системы. В машине, изображенной на рис. 2.72, оно содержит следующие узлы.
Счетчик команд (СК) – неотъемлемый элемент устройства управления любой вычислительной машины, построенной в соответствии с фон-неймановским принципом программного управления. Согласно этому принципу соседние команды программы располагаются в ячейках памяти со следующими по порядку адресами и выполняются преимущественно в той же очередности, в какой они размещены в памяти вычислительной машины.
Таким образом, адрес очередной команды может быть получен путем увеличения адреса ячейки, из которой была считана текущая команда, на длину выполняемой команды, представленную числом занимаемых ею ячеек. Реализацию такого режима и призван обеспечивать счетчик команд – двоичный счетчик, в котором хранится и модифицируется адрес очередной команды программы.
У Вас точно правильные настройки в Мобайл Легендс?!
Перед началом вычислений в счетчик команд заносится адрес ячейки основной памяти, где хранится команда, которая должна быть выполнена первой. В процессе выполнения каждой команды путем увеличения содержимого счетчика команд на длину выполняемой команды в счетчике формируется адрес следующей подлежащей выполнению команды. В рассматриваемой вычислительной машине любая команда занимает одну ячейку, поэтому содержимое счетчика увеличивается на единицу, что обеспечивается подачей сигнала управления +1СК. По завершении текущей команды адрес следующей команды программы всегда берется из счетчика команд. Для изменения естественного порядка вычислений (перехода в иную точку программы) достаточно занести в счетчик адрес точки перехода.
В ряде вычислительных машин счетчик команд реализуется в виде обычного регистра, а увеличение его содержимого производится внешней схемой (схемой инкремента/декремента).
Счетчик команд определяет лишь местоположение команды в памяти, но не держит информации о том, что это за команда. Чтобы приступить к выполнению команды, ее необходимо извлечь из памяти и разместить в регистре команды (РК). Этот этап носит название выборки команды. Только с момента загрузки команды в регистр команды становится «видимой» для процессора.
В регистре команды команда хранится в течение всего времени ее выполнения. Любая команда содержит два поля: поле кода операции и поле адресной части. Учитывая это обстоятельство, регистр команды иногда рассматривают как совокупность двух регистров – регистра кода операции (РКОп) и регистра адреса (РА), в которых хранятся соответствующие составляющие команды.
Если команда занимает несколько последовательных ячеек, то код операции всегда находится в том слове команды, которое извлекается из памяти первым. Это позволяет по коду операции определить, требуются ли считывание из памяти и загрузка в регистр команды остальных слов команды. Собственно выполнение команды начинается только после занесения в регистр команды ее полного кода.
Для чего нужны ядра и потоки в процессоре?
Указатель стека (УС) – это регистр, где хранится адрес вершины стека. В реальных вычислительных машинах стек реализуется в виде участка основной памяти, обычно расположенного в области наибольших адресов. Заполнение стека происходит в сторону уменьшения адресов, при этом вершина стека – это ячейка, куда была произведена последняя по времени запись.
Для хранения адреса такой ячейки и предназначен указатель стека. При выполнении операции push (занесение в стек) содержимое указателя стека с помощью сигнала -1УС сначала уменьшается на единицу, после чего используется в качестве адреса, по которому производится запись. Соответствующая ячейка становится новой вершиной стека.
Считывание из стека (операция pop) происходит из ячейки, на которую указывает текущий адрес в указателе стека, после чего содержимое указателя стека сигналом +1УС увеличивается на единицу. Таким образом, вершина стека опускается, а считанное слово считается удаленным из стека. Хотя физически считанное слово и осталось в ячейке памяти, при следующей записи в стек оно будет заменено новой информацией.
Регистр адреса памяти (РАП) предназначен для хранения исполнительного адреса ячейки основной памяти вплоть до завершения операции (считывание или запись) с этой ячейкой. Наличие регистра адреса памяти позволяет компенсировать различия в быстродействии основной памяти и прочих устройств машины.
Регистр данных памяти (РДП) призван компенсировать разницу в быстродействии запоминающих устройств и устройств, выступающих в роли источников и потребителей хранимой информации. В регистр данных памяти при чтении заносится содержимое ячейки основной памяти, а при записи – помещается информация, подлежащая сохранению в ячейке основной памяти. Собственно момент считывания и записи в ячейку определяется сигналами ЧтЗУ и ЗпЗУ соответственно.
Дешифратор кода операции (ДКОП) преобразует код операции в форму, требуемую для работы микропрограммного автомата (МПА). Информация после декодирования определяет последующие действия микропрограммного автомата, ее вид зависит от организации микропрограммного автомата. В рассматриваемой вычислительной машине код операции преобразуется в унитарный код УнитК, в котором каждой команде (каждому коду операции) соответствует отдельный бит. Часто код операции преобразуется в адрес первой команды микропрограммы, реализующей указанную в команде операцию. С этих позиций дешифратор кода операции правильнее было бы назвать не дешифратором, а преобразователем кодов.
Микропрограммный автомат (МПА) правомочно считать центральным узлом устройства управления. Именно микропрограммный автомат формирует последовательность сигналов управления, в соответствии с которыми производятся все действия, необходимые для выборки из памяти и выполнения команд. Исходной информацией для микропрограммного автомата служат: декодированный код операции, состояние признаков (флагов), характеризующих результат предшествующих вычислений, а также внешние запросы на прерывание текущей программы.
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Источник: studopedia.ru
Назначение устройства управления (УУ). (л11)
Устройство управления управляет работой АЛУ и внутренних регистров в процессе выполнения команды. Согласно коду операций, содержащемуся в команде, оно формирует внутренние сигналы управления блоками МП. Адресная часть команды совместно с сигналами управления используется для считывания данных из определенной ячейке памяти или для записи данных в ячейку. По сигналам УУ осуществляется выборка каждой новой, очередной команды.
Приведем алгоритм работы УУ при выполнении машинной команды:
Существует два основных типа УУ:
1. УУ с жесткой (аппвратной) логикой или схемной логической. Для каждой операции строится набор комбинационных схем, которые в нужных тактах вырабатывают управляющие сигналы.
2. УУ с гибкой, т. е. с хранимой в памяти программируемой логикой. Каждой операции ставится в соответствие в памяти микрокоманда, выполняемая в течение одного машинного такта и указание, какое должно быть выбрано из ОП следующее слово.
В аппаратных (схемных) устройствах управления каждой операции соответствует свой набор логических схем, вырабатывающих определенные функциональные сигналы для выполнения микроопераций в определенные моменты времени. При этом способе построения устройства управления реализация микроопераций достигается за счет однажды соединенных между собой логических схем, поэтому ЭВМ с аппаратным устройством управления называют ЭВМ с жесткой логикой управления. Это понятие относится к фиксации системы команд в структуре связей ЭВМ и означает практическую невозможность каких-либо изменений в системе команд ЭВМ после ее изготовления.
При микропрограммной (гибкой) реализации устройства управления в состав последнего вводится ПЗУ, каждый разряд выходного кода которого определяет появление определенного функционального сигнала управления. Поэтому каждой микрооперации ставится в соответствие свой информационный код — микрокоманда. Набор микрокоманд и последовательность их реализации обеспечивают выполнение любой сложной операции. Набор микроопераций называют микропрограммами. Способ управления операциями путем последовательного считывания и интерпретации микрокоманд из ЗУ (наиболее часто в виде микропрограммного ЗУ используют быстродействующие программируемые логические матрицы), а также использования кодов микрокоманд для генерации функциональных управляющих сигналов называют микропрограммным, а ЭВМ с таким способом управления — микропрограммными или с хранимой (гибкой) логикой управления.
В целом же, принцип микропрограммного управления (ПМУ) включает следующие позиции:
1) любая операция, реализуемая устройством, является последовательностью элементарных действий — микроопераций;
2) для управления порядком следования микроопераций используются логические условия;
3) процесс выполнения операций в устройстве описывается в форме алгоритма, представляемого в терминах микроопераций и логических условий, называемого микропрограммой;
4) микропрограмма используется как форма представления функции устройства, на основе которой определяются структура и порядок функционирования устройства во времени.
Программа состоит из машинных команд. Программа загружается в оперативную память компьютера. Затем программа начинает выполняться, то есть процессор выполняет машинные команды в той последовательности, в какой они записаны в программе.
Для того чтобы процессор знал, какую команду нужно выполнять в определённый момент, существует счётчик команд IP – специальный регистр, в котором хранится адрес команды, которая должна быть выполнена после выполнения текущей команды. То есть при запуске программы в этом регистре хранится адрес первой команды. В процессорах Intel в качестве счётчика команд (его ещё называют указатель команды) используется регистр EIP в 32-разрядных (или IP в 16-разрядных) программах.
Цикл выполнения команды:
- Выбрать из очереди команд команду, на которую указывает счётчик команд IP.
- Определить адрес следующей команды в очереди команд и записать адрес следующей команды в счётчик команд.
- Декодировать команду.
- Если в команде есть операнды, находящиеся в памяти, то выбрать операнды.
- Выполнить команду и установить флаги.
- Записать результат в память (по необходимости).
- Начать выполнение следующей команды с п.1.
Привести пример последовательности действий (шагов) при сложении двух чисел.
записать последовательность шагов при выполнении команды
сложения содержимого регистров аккумулятора АХ и базового ВХ, результат поместить на место первого операнда. Содержимое регистров: АХ=56С4 Н; ВХ=1038 Н.
в мнемонике Ассемблера:
В машинных кодах команда выглядит так:
Последовательность шагов при выполнении команды:
1. По счетчику команд IP определяется адрес выполняемой команды, которая извлекается из памяти и помещается в регистр команд процессора с помощью УУ (СОР=000000).
2. УУ в счетчике команд IP формирует адрес следующей команды: выполняемая команда имеет длину 2 байта, значит содержимое регистра IP увеличится на 2 (IP+2).
3. Декодируется команда, т.е. УУ определяет тип команды и посылает в АЛУ сигналы управления, соответствующие типу выполняемой команды (арифметическое сложение).
4. УУ подает операнды из АХ=56С4 Н и ВХ=1038 Н в регистры операндов АЛУ (если операнды находятся в ОП, то УУ производит их выборку и передачу в регистры операндов АЛУ).
5. АЛУ выполняет указанную команду:
Результат: 66FC H
УУ сохраняет результат в заданном месте (в нашем случае в регистре АХ=667С Н) и обновляет содержимое регистра FLAGS в соответствии с результатом выполненной команды:
флаг паритета (чет или нечет) PF=1.
Можно оформить в виде таблицы.
| 0 шаг | 1 шаг | 2 шаг | 3 шаг | 4 шаг | 5 шаг |
| АХ-=56С4 | АХ-=56С4 | АХ-=56С4 | АХ-=56С4 | УУ передает | АХ=66FC |
| ВХ=1038 | ВХ=1038 | ВХ=1038 | ВХ=1038 | АХ, ВХ в регистры | ВХ=1038 |
| IP | УУ по IP передает | IP + 2 | УУ декодирует | операндов АЛУ | АЛУ выполняет |
| из ОП команду | команду и посылает | команду и | |||
| в регистр МП | в АЛУ сигналы | устанавливает | |||
| соответствующие | флаги в регистре | ||||
| коду операции | FLAGS | ||||
| (СОР=000000)П | (ZF=0; SF=0; PF=1) |

Практические расчеты на срез и смятие При изучении темы обратите внимание на основные расчетные предпосылки и условности расчета.
Функция спроса населения на данный товар Функция спроса населения на данный товар: Qd=7-Р. Функция предложения: Qs= -5+2Р,где.

Аальтернативная стоимость. Кривая производственных возможностей В экономике Буридании есть 100 ед. труда с производительностью 4 м ткани или 2 кг мяса.

Вычисление основной дактилоскопической формулы Вычислением основной дактоформулы обычно занимается следователь. Для этого все десять пальцев разбиваются на пять пар.
Трамадол (Маброн, Плазадол, Трамал, Трамалин) Групповая принадлежность · Наркотический анальгетик со смешанным механизмом действия, агонист опиоидных рецепторов.
Мелоксикам (Мовалис) Групповая принадлежность · Нестероидное противовоспалительное средство, преимущественно селективный обратимый ингибитор циклооксигеназы (ЦОГ-2).
Менадиона натрия бисульфит (Викасол) Групповая принадлежность •Синтетический аналог витамина K, жирорастворимый, коагулянт.
Правила наложения мягкой бинтовой повязки 1. Во время наложения повязки больному (раненому) следует придать удобное положение: он должен удобно сидеть или лежать.
ТЕХНИКА ПОСЕВА, МЕТОДЫ ВЫДЕЛЕНИЯ ЧИСТЫХ КУЛЬТУР И КУЛЬТУРАЛЬНЫЕ СВОЙСТВА МИКРООРГАНИЗМОВ. ОПРЕДЕЛЕНИЕ КОЛИЧЕСТВА БАКТЕРИЙ Цель занятия. Освоить технику посева микроорганизмов на плотные и жидкие питательные среды и методы выделения чистых бактериальных культур. Ознакомить студентов с основными культуральными характеристиками микроорганизмов и методами определения.
САНИТАРНО-МИКРОБИОЛОГИЧЕСКОЕ ИССЛЕДОВАНИЕ ВОДЫ, ВОЗДУХА И ПОЧВЫ Цель занятия.Ознакомить студентов с основными методами и показателями.
Источник: studopedia.info
Какую роль играет уу в автоматическом выполнении программ
УУ реализует выполнение ходом вычислительного процесса, обеспечивая автоматическое выполнение команд программы. Процесс выполнения программ в ЭВМ представляет собой последовательность машинных циклов, детализирует основные целевые функции, реализуемые УУ в ходе типового машинного цикла.
Для простоты примем, что ЭВМ обеспечивает одноадресную систему команд. При этом, в частности, полагается, что до начала выполнения двухоперандной арифметической команды второй операнд находится в процессоре.
Первый этап – выборка команды из памяти. Целевую функцию этого этапа будем обозначать ЦФ-ВК (целевая функция выборки команды). За выборкой команды следует этап декодирования её операционной части (кода операции). Для простоты будем рассматривать декодирование в качестве составной части этапа ВК.
Второй этап – вторая целевая функция – формирование адреса следующей команды. На это выделяется специальный такт работы, которому соответствует ЦФ-ФАСК (целевая функция формирования адреса следующей команды).
Третий этап – этап формирования исполнительного адреса операнда или адреса перехода, на котором УУ реализует ЦФ-ФИА (целевая функция формирования исполнительного адреса операнда). Функция имеет столько модификаций, сколько и способов адресации предусмотрено в системе команд ЭВМ.
Четвёртый этап – выборка операнда. Реализуется ЦФ-ВО (целевая функция выборки операнда) из памяти по исполнительному адресу, сформированному на предыдущем этапе.
Пятый этап – исполнение операции. Реализуется ЦФ-ИО (целевая функция исполнения операции). Очевидно, что количество модификаций ЦФ-ИО равно количеству операций, имеющихся в системе команд ЭВМ.
Порядок следования целевых функций полностью определяет динамику работы УУ и всей ЭВМ в целом.
Модель УУ.
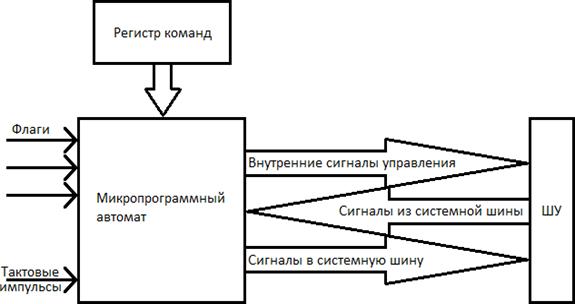
Для выполнения своих функций УУ должно иметь входы, позволяющие определить состояние управляемой системы, и выходы, через которые реализуется управление поведением системы.
Входной информацией служат тактовые импульсы – с каждым тактовым импульсом УУ инициирует выполнение одной или нескольких микроопераций. Код операции текущей команды поступает из регистра команды и используется, чтобы определить, какие микрооперации должны выполняться в течение машинного цикла. Флаги требуются УУ для оценки состояния ЦП и результата предшествующей операции, что необходимо при выполнении команд условного перехода. Сигналы из системной шины – это часть сигналов системной шины, обеспечивающая передачу в УУ запросов прерывания, подтверждений и т.п.
В свою очередь УУ, а точнее микропрограммный автомат, формирует следующую выходную информацию. Внутренние сигналы управления воздействуют на внутренние схемы МП и относятся к одному из двух типов: тем, которые вызывают перемещение данных из регистра в регистр, и тем, что инициируют определённые функции операционного устройства ЭВМ.
Сигналы в системную шину также относятся к одному из двух типов: управляющие сигналы в память и управляющие сигналы в модули ввода-вывода.
Структура УУ.
Процесс функционирования ЭВМ состоит из последовательности элементарных действий в её узлах. Такие элементарные преобразования информации, выполняемые в течение одного такта сигналов синхронизации, называются микрооперациями (МО).
Сигналы управления вырабатываются УУ, а точнее одним из его узлов – микропрограммным автоматом (МПА). Название отражает то, что МПА определяет микропрограмму как последовательность выполнения микроопераций.
Микропрограммы реализации перечисленных ранее целевых функций инициируются задающим оборудованием, которое вырабатывает требуемую последовательность сигналов управления и входит в состав управляющей части УУ.
Микропрограммы выполняются исполнительным оборудованием, входящим в состав основной памяти для ЦФ-ВК и ЦФ-ВО и операционного устройства для ЦФ-ИО. Исполнительным оборудованием для ЦФ-ФИА служит адресная часть УУ.
Управляющая часть УУ предназначена для координирования работы операционного блока ЭВМ, адресной части УУ, основной памяти и других узлов ЭВМ.
Адресная часть УУ обеспечивает формирование адресов команд и исполнительных адресов операндов в основной памяти.
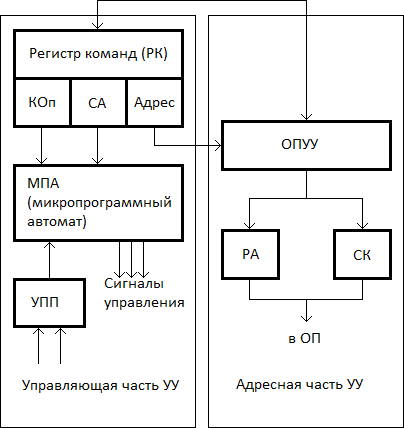
В состав управляющей части УУ входит:
1. Регистр команды (РК), состоящий из адресной (АДРЕС) и операционной части (КОп – код операции, СА – способ адресации)
2. Микропрограммный автомат (МПА)
3. Узел Прерываний и Приоритетов (УПП)
Регистр команды (РК) предназначен для приёма очередной команды из запоминающего устройства. МПА на основании расшифровки операционной части команды (КОп) СА вырабатывает определённую последовательность микрокоманд, вызывающих выполнение всех целевых функций УУ.
В зависимости от способа формирования микрокоманд различают следующие МПА:
1. С жёсткой или аппаратной логикой
2. С программируемой логикой
Узел прерываний и приоритетов позволяет реагировать на различные ситуации, связанные как с выполнением рабочих программ, так и состоянием ЭВМ.
Адресная часть УУ включает в себя:
1. ОПУУ — Операционный Узел Устройства Управления
2. РА — Регистр Адреса
3. СК — Счётчик Команд
Регистр адреса используется для хранения исполнительных адресов операндов, а счётчик команд — для выработки и хранения адресов команд. Содержимое РА и СК посылается в регистр адреса основной памяти для выборки операндов и команд соответственно.
Операционный узел УУ, называемый иначе узлом индексной арифметики или узлом адресной арифметики обрабатывает адресные части команд, формируя исполнительные адреса операндов, а также подготавливает адрес следующей команды при выполнении команд перехода.
Состав ОПУУ может быть аналогичен составу основного операционного устройства ЭВМ (простейших ЭВМ с целью экономии совмещается с основным операционным устройством).
В состав УУ также входит могут входить дополнительные узлы в частности узел организации прямого доступа к памяти. Обычно этот узел реализуется в виде самостоятельного устройства – контроллера прямого доступа к памяти, который обеспечивает совмещение во времени работы операционного устройства с процессом обмена информацией между ОП и другими устройствами ЭВМ, минуя процессор.
Довольно часто регистры различных узлов УУ объединяют в отдельный узел управляющих (специальных) регистров УУ (регистр флагов, регистр-защёлка, регистр команд и т.п.)
Рассмотрим подробно работу МПА с жёсткой и программируемой логикой.
Обычно тип МПА, формирующего сигналы управления, определяет название всего УУ. Так УУ с жёсткой логикой управления имеет в своём составе МПА с жёсткой (аппаратной) логикой. При создании такого МПА выходные сигналы управления реализуются за счёт однажды соединённых между собой логических схем.
Исходной информацией для УУ служат: содержимое регистров команды, флаги, тактовые импульсы и сигналы, поступающие с шины управления.
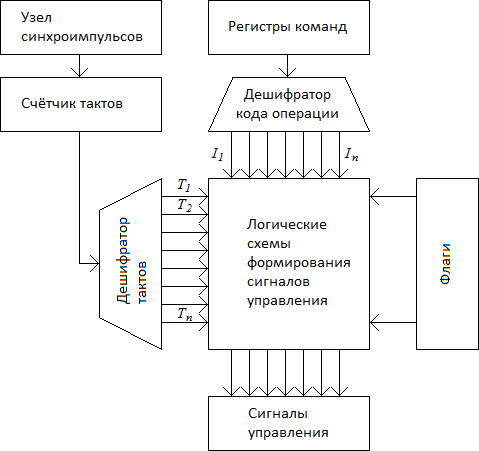
Код операции, хранящийся в РК, используется для определения того, какие сигналы управления (СУ) и в какой последовательности должны формироваться, при этом с целью упрощения логики управления желательно иметь в УУ отдельный логический сигнал для каждого кода операции (I0, I1, …, Ik). Это может быть реализовано с помощью дешифратора.
Дешифратор кода операции преобразует код с J-ой операцией, поступающий из регистра команды РК в единичный сигнал на J-том выходе.
Машинный цикл выполнения любой команды состоит из нескольких тактов. Сигналы управления, по которым выполняется каждая микрооперация, должны вырабатываться строго в определённые моменты времени, поэтому все СУ «привязаны» к импульсам синхронизации (СИ), формируемым узлом синхроимпульсов. Период СИ должен быть достаточным для того, чтобы сигналы успели распространиться по ШД и другим цепям.
Каждый сигнал управления ассоциируется с одним из тактовых периодов в рамках машинного цикла. Формирование сигналов, отмечающих начало очередного тактового периода, возлагается на синхронизатор. Синхронизатор содержит счётчик тактов, осуществляющих подсчёт СИ.
Узел синхроимпульсов после завершения очередного такта работы добавляет к содержимому счётчика тактов единицу. К выходам счётчика подключён дешифратор тактов, с которого и снимаются сигналы тактовых периодов T1, T2, …, Tn.
В i-ом состоянии счётчика тактов, т.е. во время I-ого такта дешифратор тактов вырабатывает единичный сигнал на своём I-ом выходе. При такой организации УУ должна быть предусмотрена обратная связь, с помощью которой по окончании цикла команды счётчик тактов опять устанавливается в состояние T1.
Микропрограммный автомат
Дата: 2019-02-02, просмотров: 430.
Источник: findout.su