
В любом языке программирования можно выделить три составляющие: декларативную (описания данных), процедурную (правила преобразования данных) и инференциальную (правила управления компонентами процедурной, а иногда и декларативной составляющих). Не исключение в этом смысле и языки представления знаний, но их специфика в том, что описания здесь в основном структурные, а данные могут быть активными за счет присоединенных процедур, обеспечивающих «вычисление» их значений; правила преобразования данных ориентированы скорее на то, чтобы явно специфицировать, что должно быть получено, не концентрируя без необходимости внимание программиста на том, как достигается результат. Но самое большое отличие ЯПЗ от других языков в инференциальной компоненте, которая реализует некоторую (чаще всего встроенную) стратегию поиска решения. Такой подход предполагает, что при выполнении
ЯПЗ-программ всегда существует «арбитр», функцией которого является оценка «текущей ситуации» и выбор пути движения от нее к целевой.
Актуальные возможности среды общих данных Pilot-BIM
В разных ЯПЗ имеются различные средства определения декларативной, процедурной и инференциальной составляющих. Отличия же здесь связаны, в первую очередь, с использованием того или иного подхода к представлению знаний.
В качестве примера развитых средств продукционно-фреймового программирования баз знаний ниже обсуждается ЯПЗ PILOT/2, разработанный в рамках проекта PiES WorkBench [Khoroshevsky, 1994b]. Его специфика в том, что здесь введены явно достаточно мощные средства программирования инференциальной составляющей и выразительные описания образцов, а также удобный и открытый для расширения набор операторов преобразования данных в основной и внешней памяти.
В общем случае PILOT-программа содержит две основные (декларативная и процедурная) и две вспомогательные (включение файлов и переопределение строк) компоненты. Декларативная часть состоит из элементов, специфицирующих переменные, прототипы функций и/или процедур, а также необходимые базы знаний. Продукционная часть состоит из секций, которые, в свою очередь, содержат продукции. Инференциальная составляющая присутствует в ЯПЗ PILOT/2 неявным образом в виде встроенного «арбитра», алгоритм работы которого описывается ниже, и, кроме того, определяется средствами настройки и перепрограммирования такого «арбитра».
Разбиение на секции и правила и специальные условия в виде секционных и правиловых разрешений необходимы для того, чтобы обеспечить многоуровневое управление выполнением PILOT-программ. Как известно [Форсайт, 1987], «арбитр» продукционной системы функционирует следующим образом: сначала для всех продукций проверяются условия применимости и из тех продукций, для которых эти условия истинны, формируется конфликтное множество. Из этого множества по определенному критерию выбирается исполняемая продукция; она реализуется (то есть отрабатывается ее правая часть), и цикл управления работой «арбитра» повторяется, пока конфликтное множество на некотором шаге не станет пустым (тогда работа продукционной системы завершается естественным образом) или функционирование не будет прервано явным образом, например с помощью специального действия из правой части исполняемой продукции (в этом случае работа продукционной системы завершается принудительно).
My first programm for Pilot-ICE | Как написать программу для Pilot-ICE
Понятно, что работа такого «арбитра» имеет смысл лишь в тех случаях, когда продукций немного (десятки), а в конфликтном множестве продукций мало (единицы). В противном случае функционирование системы неэффективно и требуются специальные алгоритмы, чтобы «арбитр» не тратил все время только на себя. К настоящему времени разработаны и опробованы на практике различные стратегии увеличения эффективности работы «арбитра» [de Kleer, 1989], которые используются и в данном случае. Но не менее важно иметь гибкие средства описания этих стратегий с уровня входного языка. Тогда пользователь, в зависимости от требований его задачи, сможет отказаться от стандартных стратегий и описать свою собственную, которая адекватна его конкретному случаю.
Для описания стратегий управления выводом решений в ЯПЗ PILOT/2 служат секционное и правиловое разрешения. Каждое из них является последовательностью фильтров, с помощью которых формируется и/или изменяется конфликтное множество продукций. Для понимания того, как пользоваться этими фильтрами, необходимо знать стратегию встроенного «арбитра» PILOT/2. Поэтому ниже приводится алгоритм его работы, специфицирующий схему, представленную на рис. 7.1.
Алгоритм работы встроенного «арбитра» ЯПЗ PILOT/2
while (уровень-0!= NULL)
«выбрать из «повестки-дня» секцию для выполнения»;
«сформировать на уровне-1 мн-во правил этой секции»;
«выполнить фильтрацию мн-ва правил на уровне-1 по флагу активна/ неактивна»;
«выполнить фильтрацию мн-ва оставшихся правил на основании вычисления истинности секционного разрешения»;
«сформировать на уровне-2 множество активных правил»;
for (каждого правила на уровне-2)
«вычислить значение истинности левой части»;
if (значение истинности правила == TRUE)
«добавить правило в конфл. мн-во на уровне-3»;
«выполнить фильтрацию мн-ва оставшихся на уровне-3 правил на основании вычисления истинности правиловых разрешений»;
«сформировать на уровне-4 множество готовых к выполнению правил»;
if (на уровне-4 осталось одно правило)
«выполнить данное правило»;
else
«выполнить случайный выбор исполняемого правила из множества правил на уровне-4»;
«выполнить данное правило»;
Приведенный алгоритм прозрачен и не нуждается в особых комментариях. Заметим лишь, что фильтр «активна/неактивна» реализован как встроенная проверка флагов активности продукций текущей секции.
Первоначально (при запуске секции) «арбитр» считает, что все продукции секции активны, но в процессе выполнения их состояние может измениться за счет применения соответствующих действий. Фильтр секционного разрешения тоже программируется с уровня входного языка.
В результате применения этих двух фильтров формируется множество продукций, которые принципиально могут войти в конфликтное множество. Этап фильтрации продукций по истинности левых частей – традиционный, в результате получается традиционное конфликтное множество (правда, уже усеченное за счет предыдущих двух фильтров). На этом множестве в ЯПЗ PILOT/2 может быть организовано дополнительное управление за счет программируемых правиловых разрешений. Если все усечения не привели к однозначному выбору исполняемой продукции, она выбирается случайным образом и цикл работы «арбитра» повторяется.
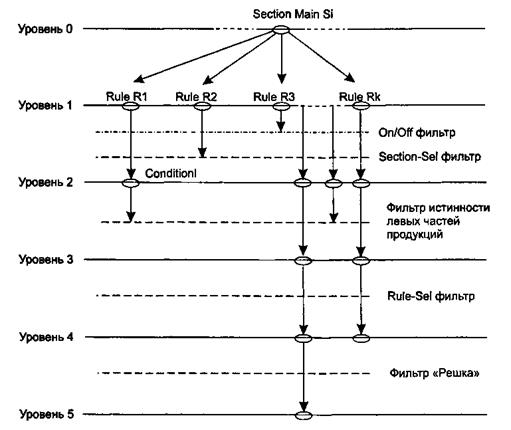
Рис. 7.1. Встроенный «арбитр» PILOT/2
Точек «влияния» на работу «арбитра» PILOT/2 всего четыре: активность/неактивность продукций; секционное разрешение; истинность левых частей продукций; правиловое разрешение. Существует и пятая точка — алгоритм случайного выбора, но она инженеру по знаниям недоступна.
Секционные и правиловые разрешения суть последовательность операторов if-then-else и действий разрешения. При этом сами условия секционного и правилового разрешений — логические формулы в базисе И-ИЛИ-НЕ с общепринятым старшинством операций. А специфика ЯПЗ PILOT/2 состоит в том, как определяются элементарные разрешения. Семантика действий разрешений (при условии, что через КМ обозначено конфликтное множество) — следующая:
set (Rl, R2. Rk) KM — Rl,R2. Rk
insert (Rl, R2. Rk)KMн — KMC + Rl + R2 +. + Rk
remove (Rl, R2. Rk)KMн — KMC — Rl — R2 -. — Rk
removeall KM = пустое множество
break Прерывает выполнение оставшихся элементов
секционного или правилового разрешения
Семантика элементарных секционных (продукционных) разрешений — определяется правилами вида:
1. Элементарное секционное разрешение active (Rl,R2. Rk)истинно, если все продукции Rl, R2. Rk имеют включенные флаги активности.
2. Элементарное секционное (продукционное) разрешение used (Rl,R2. Rk)истинно, если все продукции Rl, R2. Rk применялись ранее.
3. Элементарное продукционное разрешение ready (Rl,R2. Rk) истинно, если все продукции Rl, R2. Rk готовы к выполнению, что, в свою очередь, справедливо, если их левые части (условия) истинны.
Понятно, что практически все элементарные разрешения работают с именами продукций, так что проверка соответствующих условий выполняется «арбитром» достаточно быстро. И этих средств (в подавляющем большинстве случаев) достаточно для существенного увеличения гибкости управления продукционной системой и сохранения в то же время приемлемой эффективности ее работы.
Вместе с тем в ЯПЗ PILOT/2 инженеру по знаниям предоставлена возможность управления работой продукционной системы и на основе анализа базы знаний. Нужно лишь понимать, что это управление «дорогое», так что пользоваться им следует лишь в тех случаях, когда соответствующие условия невозможно (или нецелесообразно) проверять в левых частях продукций.
Источник: studopedia.su
Тема 2.1. Использование и настройка БПЛА. Использование и настройка бпла обозначения и сокращения

Единственный в мире Музей Смайликов
Самая яркая достопримечательность Крыма

Скачать 6.8 Mb.
Инструкция по применению Dji Pilot
DJI Pilot – приложение для управления полетом в ручном и автоматических режимах. Программа совместима с промышленными дронами DJI и полезной нагрузкой, что предоставляет пилотам возможность для более эффективного управления.
Функционал программы позволяет создавать параметры полета и управлять ими, а также функциями фото и видео. Приложение способно работать с различными полезными нагрузками, например, с термальной камерой Zenmuse XT2 и камерой с зумом Zenmuse Z30, аксессуарами для Matrice 200 и полезными нагрузками сторонних производителей на базе SDK DJI (дополнительные порты расширения).
DJI Pilot можно использовать совместно с другим программным обеспечением DJI. При помощи ПО для управления дронами DJI FlightHub видео и полетные данные могут передаваться с дрона в режиме реального времени. DJI Pilot работает в режиме оффлайн-полета (Local Data Mode) без интернет-соединения, сохраняя при этом все данные; приложение отображает предупреждения системы DJI AirSense, получаемые при определении самолета или вертолета рядом с вашим дроном.
Перед началом работы необходимо установить монитор CrystalSky к дистанционному пульту управления.
CrystalSky представляет собой планшет со сверхъярким экраном, максимальный показатель яркости экрана составляет 1000 кд/м², что делает CrystalSky в четыре раза ярче экранов мобильных гаджетов. Изображение становится более ярким и детальным благодаря срабатыванию в условиях слишком яркого света специального режима. Также CrystalSky оснащен самым современным видеодекодером, который помогает в процессе передачи минимизировать задержку видеосигнала. Если на мобильных устройствах из- за технических ограничений возникают проблемы с передачей изображений, наблюдается задержка сигнала, то благодаря решениям в CrystalSky у вас не будет подобных проблем.
Подключаем дистанционный пульт управления, беспилотный летательный аппарат и посредством CrystalSky подключаем «Dji Pilot».
Программа автоматически идентифицирует модель БПЛА и полезную нагрузку в левом нижнем углу
- manual flight – полеты в ручном(свободном) режиме.
- mission flight – полеты в автоматическом режиме.
Нажимаем на Manual flight и у нас открывается интерфейс программного обеспечения

Условные обозначения:
1 — Возвращение на главную страницу 2 — Ready to GO
- Зеленый сигнал — GPS соединение сильное и можно лететь безопасно.
- Желтый сигнал — можно лететь, но вероятно, что вы можете потерять управление дроном.
- Красный сигнал — дрон не может лететь.

Return to home altitude – высота на которой дрон вернется на точку взлета и совершит посадку
Flight mode – режим полета
Compass — компас помогает вашему дрону ориентироваться на местности. Когда вы взлетаете из нового места, то компас нужно калибровать. Обратите внимание на то, что на компас могут влиять электромагнитные поля.
IMU (Inertia Measurement Unit) — это акселерометр и гироскоп, с помощью них можно видеть высоту, а также угол полета дрона. Если в приложении всплывает сообщение, что нужно откалибровать IMU, то обязательно сделайте это, следуя инструкции на экране.
Control )_Status’>ESC (Electronic Speed Control) Status — это управление вашими моторами. Если возникла проблема с моторами, то вы получите уведомление на экране о том, что их нужно настроить. Если после настройки, уведомление не исчезло, то необходимо отдать дрон на диагностику в сервисный центр.
Vision Sensors — это режим настройки сенсоров, которые обнаруживают препятствие во время полета. Рекомендую, чтобы этот режим был включен постоянно.

Control stick mode – режим управления БПЛА.
Remote controller battery – индикатор заряда аккумулятора дистанционного пульта управления.
Aircraft battery temperature – температура аккумуляторов установленных на беспилотном летательном аппарате.
Gimbal status – состояние трехосевого стабилизатора.
Obstacle Detection Status — это визуальное предупреждение, которое всплывает на экране, когда поблизости обнаружено препятствие.
- Режим управления (Flight Mode)
- P-mode: в режиме позиционирования все сенсоры дрона активированы. Это самый безопасный режим для полета. Даже если вы отпустите стики управления, то дрон автоматически остановится.
- A-mode: если дрон потеряет сигнал GPS или сигнал будет слабый, а также если слишком темно для системы обзора, то автоматически включится этот режим. Дрон не будет сохранять высоту, но будет медленно двигаться.
- S-mode: при спортивном режиме ваш дрон может лететь с максимальной скоростью используя сигнал GPS для позиционирования.
- DJI AirSense
- Сигнал GPS (GPS Signal Strength)
- Система 3D-сенсоров (3D Sensing System Status)
- Связь с БПЛА с пультом
- Частота полета
- 10. Уровень заряда аккумулятора (Battery Level)
- Возвращение камеры в исходное положение.
Регулировка наклона подвеса камеры Adjust Gimbal Roll: вы можете настроить угол подвеса камеры, если он смещен, даже во время полета.
- Маяк для предотвращения столкновений
- Слежение камерой за выбранным объектом

- Режимы настройки Подвеса Камеры Gimbal Mode
- Следование Follow: в этом режиме камера будет оставаться стабильной и удерживать горизонт.
- FPV: в этом режиме камера будет следовать за движениями дрона. Таким образом, если вы измените направление движения дрона, то камера будет двигаться также в этом направлении.
- Центрирование Камеры Centring Camera: здесь можно установить камеру горизонтально в центре или прямо вниз.
- Система 3D-сенсоров (3D Sensing System Status)
- Особые настройки камеры, быстрый доступ к настройкам ISO, Shutter, и EV.
- диафрагма,
- выдержка,
- светочувствительность ISO.
- Экспозиция камеры
- Автофокус AF Lock/Unlock
- Настройка зума камеры.
- T – увеличение зума
- 1.0x – кратное увеличение зума
- W – отдаление зума
- R – возвращение в исходное состояние
- Вид карты.
- Основные характеристики во время полета
- H – высота от точки взлета;
- D – расстояние от точки взлета (по короткой траектории);
- V.s — ускорение(скорость) при наборе высоты;
- H.s – ускорение(скорость) при полете.
- Настройки камеры (Camera Settings)
- Режим Авто Auto: автоматическая настройка камеры.
- Диафрагма Aperture (A): здесь можно отрегулировать количество света, поступающее в камеру. Это измеряется в f-показателе. Чем ниже этот показатель, тем больше диафрагма, и, соответственно, больше проходит свет. Чем больше f-показатель, тем меньше света проходит в камеру. В A — режиме, вы можете настроить Диафрагму. Но все остальные настройки будут выставлены автоматически.
- Затвор Shutter (S): затвор контролирует время поступления света на линзы. Чем ниже скорость работы затвора, тем больше света проходит внутрь. Это позволяет делать хорошие фото при тусклом свете. Высокая скорость работы затвора позволяет делать четкие снимки движущихся объектов и людей. В S-режиме вы можете установить скорость работы затвора, но остальные настройки будут выставлены автоматически.
- Ручной режим Manual (M): вы можете настроить Диафрагму и Затвор в ручном режиме.
- Показатель коррекции Экспозиции EV (Exposure Compensation Value): это показатель того насколько далеко вы ушли от рекомендованных настроек при настройке режимов вручную. Например, показатель EV должен быть 0, а вместо этого он +2,
- Фронтальная камера
- Настройка экспозиции
- Общие настройки (General settings)
Источник: topuch.com
Определение заготовки, Определение основного контура, 19 пример – Инструкция по эксплуатации HEIDENHAIN CNC Pilot 4290 V7.1
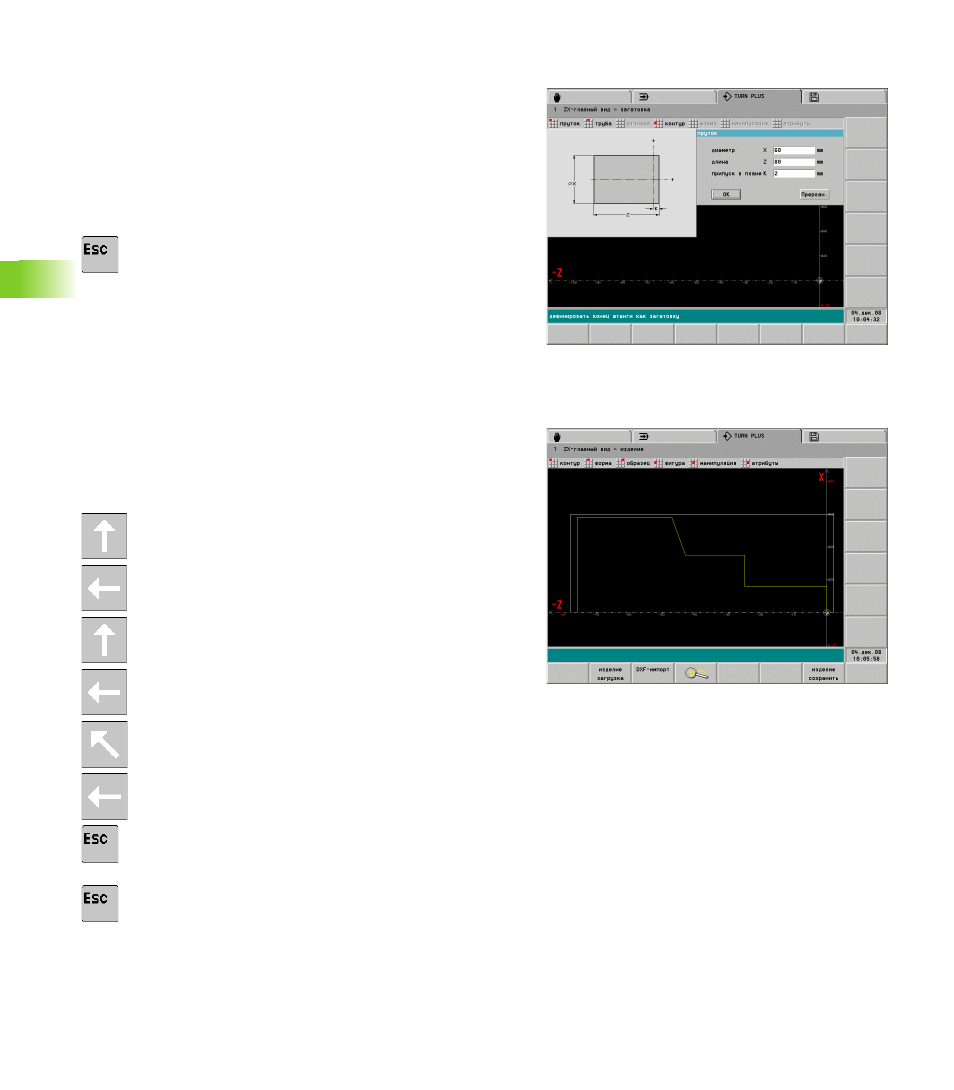
Выберите «Обрабатываемая деталь > Заготовка > Пруток».
TURN PLUS откроет диалоговое окно «Пруток».
TURN PLUS изображает заготовку.
Нажмите клавишу ESC: произойдет возврат в
Определение основного контура
Выберите «Обрабатываемая деталь > Готовая деталь (>
Диалоговое окно «Точка (стартовая точка контура)»:
X = 0; введите Z = 0
введите X = 58; W = 70
Нажатие клавиши ESC: переход на уровень меню
Нажмите клавишу ESC. TURN PLUS выдаст
запрос: «Закрыть контур?»
Подтвердите: «Да». Базовый контур создан.
Источник: www.manualsdir.ru