
Доброго времени суток! Прошу подсказать, как у кого устроена логика запуска PNS программ.
В данный момент у меня UO сигналы размаплены на флаги. И групповые тоже. Т.е. при включении этих флагов, в т.ч. и группового(PNS) с физической кнопки сигналы не выключить(Prod start и PNS STROBE). Все выбирается верно в фоновой логике, но для работы программы PRG Running не включается, т.к. нужно гасить Prod start и PNS STROBE.
Может кто скинет пример своей логики выбора и запуска программ PNS.
ПЛК пока нет, есть 4 физ. кнопки без фиксации
__________________
Мой робот: FANUC ARC Mate 100iD/10L
Регистрация: 24.06.2015
Сообщения: 76
Сказал Спасибо: 11
Сказали Спасибо 11 раз(а) в 10 сообщении
Регистрация: 07.02.2020
Сообщения: 18
Сказал Спасибо: 2
Сказали Спасибо 1 раз(а) в 1 сообщении
Смысл в том, что имея 4 физ. кнопки (Di) хотелось бы каждой кнопкой запускать одну программу PNS. И Чтобы каждая кнопка выполняла функцию запуска программы, повторное нажатие- пауза, третье нажатие-продолжение выполнения программы, четвертое опять пауза, пятое- продолжение и т.д.
Задание 15.1_ ОГЭ информатика 2020
Я так понимаю первоначальный запуск нужно связать с Perch сигналом.
Первые два нажатия реализованы, а вот продолжение выполнения программы не получается. Там сигнал Start и он нисходящий. Подскажите, какие условия можно прописать?
В перспективе будет панель оператора с релейными выводами, но пока нужно освоить физ. кнопки.
__________________
Мой робот: FANUC ARC Mate 100iD/10L
Регистрация: 06.09.2021
Сообщения: 3
Сказал Спасибо: 0
Сказали Спасибо 0 раз(а) в 0 сообщении
Регистрация: 24.08.2021
Сообщения: 10
Сказал Спасибо: 1
Сказали Спасибо 3 раз(а) в 3 сообщении
Регистрация: 05.02.2022
Сообщения: 3
Сказал Спасибо: 2
Сказали Спасибо 0 раз(а) в 0 сообщении
Добрый день. В мануале по программированию робота все очень подробно расписано.
А именно.
1. Надо перепривязать di к необходимым UI (важно, на imstp,enbl,hold всегда подаётся 1, или робот не поедет)
2. Перепривязать do к UI, которые отвечают за pns1-8, pns-strobe, start.
3. В configuration-prog setting, вроде, первые два пункта поменять на pns и uop.
4. Перевести робота в авторежим.
5. Подать необходимые сигналы на pns1..8 (двоичная система)
6. Дать импульс не менее 0,5с на вход pns_strobe
7. Дать импульс не менее 0,5с на вход start
И. Робот поедет по программе с названием pns. Где . это число в десятичной системе преобразованное из двоичного представления на входы pns1..8. (если отсутствует какие-либо ошибки и на робота предварительно подан сигнал fault reset, чтоб включились приводы)
Источник: robotforum.ru
Как собрать шахтерского робота
Работа в КуМир с использованием робота
Абстрактное описание сборки робота я уже писал много раз, поэтому это будет короткое руководство на конкретном примере.
Шаг 1. Подготовка

3) Память
Практика показала, что одной планки 1 уровня для нормальной работы на компьютере недостаточно. TRMiner хранит в памяти данные о жилах руды, поэтому требует как минимум две планки уровня 1.5. При меньшем количестве корректную работу не гарантирую. (Хотя возможно он будет работать.)
4) Монитор
Достаточно 1 уровня. Робот не поддерживает цветные экраны. (Можно собрать робота и без экрана. Но это — для любителей хардкора.)
5) Видеокарта
Также достаточно 1-го уровня. Требуется для вывода изображения на монитор. Без нее монитор будет просто черным.
6) Клавиатура
Чтобы иметь возможность набрать что-то в консоли.
7) Дисковод
Для установки OpenOS и копирования программы TRMiner. (Любители хардкора могут попробовать запустить робота без дисковода. Это возможно. Но я не скажу как 😛 )
8) Жесткий диск
Для хранения ОСи и программы. Первоэтапный диск в 1Мб хватит с головой. Это даже много. Будет занято ~20%.
9) Lua BIOS
Этот чип нужен для корректной работы OpenOS. Крафтится из пустого EERPOM и книги.
Детали обязательные для Totoro Recursive Miner:
10) Апгрейд-инвентарь.
Робот хранит в нем добытую руду. Рекомендуется установить 2 или 3 апгрейда (т.е. 32 или 48 слотов). Больше можно не ставить, ибо обычный сундук, в который робот сбрасывает добычу имеет размер в 27 слотов.
11) Апгрейд-генератор.
Нужен роботу для непрерывной работы. Робот будет сам заряжаться с его помощью, сжигая часть добытого угля.

(Любители хардкора могу не ставить генератор. Программа будет работать. Вы можете заряжать робот таская за ним заряжающее устройство, или приделав пару солнечных панелей и выкопав вертикальный колодец до поверхности. )
12) Апгрейд-опыт
Позволит роботу прокачиваться во время добычи. Со временем он станет быстрее двигаться, меньше тратить энергию и медленнее ломать свой инструмент. Требует Корпуса 3-его уровня.
13) Апгрейд-батарея
Ну тут все понятно. Увеличивает емкость аккумулятора. Полезная штука.
Детали вредные (эксклюзив для IT 1.7.10):
14) Апгрейд-чанклоадер
После включения робота, в момент опустошит его аккумулятор. На том все и закончится.
Вот две рабочие конфигурации:


(UPD.: Тут уважаемый Krutoy любезно предоставил картинку, которая иллюстрирует, сколько всего ресурсов у вас уйдет на сборку рекомендуемой конфигурации робота:

За что ему большое спасибо.)
Уложите выбранные детали в сборщик и запускайте процесс.
Шаг 3. Софт
Раздобудьте дискету с OpenOS (крафтится из чистой дискеты и книги).
Скачайте программу Totoro Recursive Miner на другую, чистую дискету.
Для этого этапа нам потребуется компьютер. Свой или соседа, все равно. Он должен иметь выход в интернет (интернет-плата) и дисковод для дискет.
Как скачать программу на новую дискету:
1) Вставить дискету
2) Посмотреть в инвентаре ее адрес. Запомнить первые его буквы-цифры.
3) Написать в консоли команду:
label -a xxxx floppy
Где xxxx — первые буквы-цифры ее адреса, а floppy — это будущее название (этикетка).
В результате ваша дискета получит короткое и ясное название.
4) Написать команды:
mount floppy fcd /f
В результате вы окажетесь в корневом каталоге дискеты.
5) Скачать программу TRMiner:
pastebin get L21VMm7S mine
Для этого нужна интернет-плата. Программа будет сохранена на дискету под именем mine.
6) Извлеките дискету.
(Также можно поискать игрока с ником Totoro и подоставать его, чтобы дал дискету с программой нахаляву. Тогда и компьютер не нужен.)

Шаг 4. Установка
Поставьте робота. Можно прямо на месте предполагаемой добычи руды. Чтоб два раза не ходить.
Включите его и установите OpenOS (это надо сделать только один раз).
Как установить OpenOS:
1) Вставить в робота зеленую дискету.
3) Написать в консоли:
install
4) Он спросит на какой жесткий диск устанавливать. Напишите 1 .
5) Согласитесь на рестарт ( y ).
Теперь сбросьте программу TRMiner с дискеты на жесткий диск робота. (Можно каждый раз вставлять дискету и запускать программу прямо с нее, но это лишние действия. Зачем оно нам?)
Как сбросить программу с дискеты:
1) Вставить дискету с программой в робота.
2) Убедиться, что он включен.
3) Написать в консоли робота:
mount floppy fcp f/mine mine
4) Достать дискету.
Все! Софт установлен. Дискеты больше в принципе не нужны. Но сохраните их на всякий случай.
Шаг 4A. Настройка программы (необязательно)
Для настройки программы Totoro Recursive Miner, введите в консоль команду:
edit mine
В двадцатой строке вы увидите константы набранные заглавными буквами:
TECH_SLOTS = 6VANILLA_CHEST = truePATHWAYS = trueDROP_TRASH = false
TECH_SLOTS — количество слотов с образцами «пустой породы» и сундуками. То есть тех слотов, которые не будут заняты добычей.
VANILLA_CHEST — режим для работы с обычными сундуками. Есть возможность работать с сундуком Эндера.
Для этого, установите константу в значение false и дайте роботу инструмент с зачарованием «Шелковое касание». В слот с сундуками положите один сундук Эндера.
PATHWAYS — если true , робот проделает в шахте дорожки, для удобства хождения игрока
DROP_TRASH — если true , робот будет выбрасывать булыжник и другую «пустую породу».
После изменения констант, нажмите клавиши Ctrl+S (сохранение) и Ctrl+W (выход).
Шаг 5. Добыча полезных ископаемых
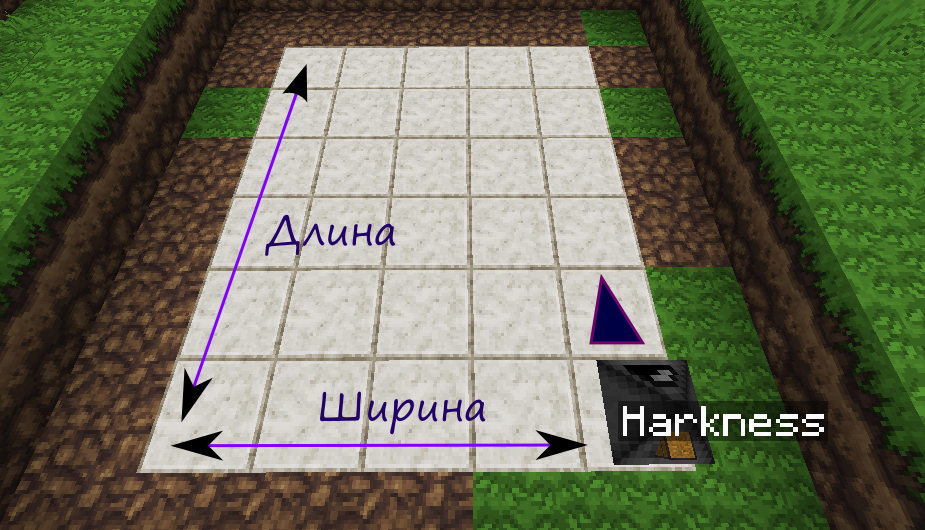
Принесите робота на место предполагаемой шахты. Поставьте робота в ее воображаемый правый передний угол, передней стороной вперед.
В инвентаре робота разложите образцы пустой породы (5 штук по дефолту). Причем (лайфхак для ускорения работы робота), кладите в порядке убывания распространенности. У меня это камень-земля-гравий-булыжник-камень Бездны (abyssal stone из RailCraft). В последний из технических слотов (6-ой по дефолту) положите сундуки (или сундук Эндера, если вы перенастроили программу).
Роботу в «руку» положите кирку или бур. Чем прочнее и острее — тем лучше.

Теперь включите. Введите в консоль команду такого формата:
mine [ширина] [возвращаться_в_начало]
Первые два параметра — числовые. Последний — true/false (Если не указать, равен false ).

Ура! Наконец все ездит, копает и складывает без нашего участия. Остается только иногда менять кирку. И уносить добычу.

Enjoy!

- 21
Подписчики 0
33 комментария
Рекомендуемые комментарии
Полезные ресурсы
Lua
Голосование
Информация
О нас
Проект ComputerCraft.ru основан в 2014 году. Особенностью наших игровых серверов является обязательное наличие компьютерных и технических модов и аддонов. Когда мод ComputerCraft устарел и больше не отвечал техническим требованиям, ему на замену пришел современный и высокотехнологичный мод OpenComputers. Черепашек заменили роботы из мода Opencomputers.
ComputerCraft.ru — это площадка для игры в Minecraft и общения на форуме, стабильные серверы и возможность в легкой и игровой форме обучиться программированию на языке Lua и реализовать все свои самые смелые инженерные идеи и решения и поделиться ими с другими игроками. За все время существования проекта сменилось 10 игровых серверов, которые посетили более 9000 игроков.
На сайте собрано множество интересных программ и библиотек, статей, гайдов, веселых историй и горячих обсуждений, выдвинуто множество идей автоматизации и способов программирования. У нас играют и пишут программы как новички так и опытные программисты. А самые продвинутые участники нашего коллектива даже разрабатывают собственные авторские моды и аддоны, ресурспаки, репозитории, мощнейшие библиотеки и операционные системы. Регистрируйтесь прямо сейчас и присоединяйтесь к нашему дружному коллективу фанатов игры Minecraft , компьютерных и инженерных модов!
Источник: computercraft.ru
2б класс. Урока 22 Запуск программы для робота Раздел Робототехника Ф. И. О

Единственный в мире Музей Смайликов
Самая яркая достопримечательность Крыма

Скачать 198.51 Kb.
Создание атмосферы сотрудничества на уроке.
– Как вы думаете, что сближает в обществе человека с человеком? (Улыбка.) Давайте улыбнемся друг другу и пожелаем успеха.
(К, Мозговой штурм, Диалог)
- Посмотри видео. С какими частями конструктора LEGO Mindstorms EV3 ты познакомился?
- Рассмотрим, как действует кнопка обычного дверного звонка.
QR-код в учеб- нике.
Электронное приложение, интерактивная
- Что такое алгоритм ветвления? Определите тип алгоритма по блок-схеме. Проблемныйвопрос:
- Как связать между собой понятия:
туальное устройство от обычной электрической или механической конструкции. Они служат для создания обратной связи и позволяют осуществлять автономное управление роботом.
Я предлагаю всем вместе (на интерактивной доске и за компьютерами) выполнить задание. В процессе его выполнения мы познакомимся
«Выполним вместе». Создадим программу: при нажатии на датчик касания наш робот начинает двигаться, при отпускании кнопки робот останавливается.
Источник: topuch.com