

советы по уходу за роботом
- Заряжайте аккумуляторы робота только в присутствии взрослых!
- Не помещайте робота под воду или дождь — иначе это будет его последняя поездка
- Не давайте играть с роботом маленьким детям или домашним животным
- Следите за тем, чтобы перемычки всегда были плотно подключены к своим местам
- Проверяйте плотное закручивание всех винтиков робота — из-за вибрации они могут раскручиваться самостоятельно
если что-то пошло не так
Первое, что вы должны сделать — просто отключите и заново включите робота,
если это не поможет, то нажмите на нужную ситуацию:
1. Проверьте, подключен ли кабель USB к плате Arduino
2. В Arduino IDE проверьте, выбран ли порт (не COM1)

Урок 1. Как установить программу LEGO MINDSTORMS EV3 Home Edition
3. Если вы подключали Bluetooth-модуль, временно отключите у него выходы RX и TX (0 и 1 пин на плате Arduino)
4. Выключите питание роботу (черный выключатель на 0), выньте и вставьте обратно кабель USB из Arduino, снова проверьте порт
- Проверьте все перемычки, вставленные в плату Arduino и в драйвер двигателя.
- При включении робота — загораются какие-либо светодиоды на Arduino? Если нет — проверьте, как вставлены аккумуляторы (плоская часть к пружинке), а также провода, идущие от их держателей.
- Если светодиоды на Arduino светятся, но робот не двигается — возможно, не хватает питания для моторов. Зарядите аккумуляторы в присутствии взрослых (время полного заряда около 6-8 часов, заряжать можно с перерывами, выключая зарядку, если вам нужно отойти).
- Если перемычки проверены, Arduino работает, аккумуляторы заряжены, проверьте красно-черный провод, подключенный к драйверу двигателей. Сам драйвер двигателей должен светить красным светодиодом.
- Вероятнее всего, у вас разряжены аккумуляторы. Зарядите их в присутствии взрослых (время полного заряда около 6-8 часов, заряжать можно с перерывами, выключая зарядку, если вам нужно отойти).
- Проверьте, не намотал ли робот посторонних предметов (нитки, волосы) на вал своих колёс.
- Если вы самостоятельно загружали программу, на вкладке «МОТОРЫ» в mBlock проверьте скорость, заданную моторам. Она должна быть 150 или больше (максимум 255).
У вас отключился ультразвуковой дальномер и робот получает 0 см до препятствий — проверьте, плотно ли подключены перемычки к контактам дальномера (VCC, GND, TRIG, ECHO) и Arduino (12 PIN — TRIG, 11 PIN — ECHO).
Проблема с сервоприводом — проверьте 3 провода (оранжевый, красный, коричневый) и перемычки, идущие к Arduino. Оранжевый провод подключается к PIN 4, красный — 5V, коричневый — GND.
- Проверьте перемычки питания датчиков линии — датчики должны светиться зеленым и моргать, если к ним поднести руку.
- Датчики сдвинуты в «слепую зону» — поправьте их, чтобы они смотрели ровно вперед по направлению движения робота.
- Не установлены нужные пороговые значения в программе mBlock — их нужно подобрать опытным путем (обычно, от 50 до 400).
- Перезагрузите робота (выкл-вкл черный переключатель) и заново откройте приложение. Попробуйте снова подключиться.
- Проверьте питание Bluetooth-модуля (VCC, GND) — он должен моргать красным светодиодом.
- Проверьте подключение перемычек RX-TX. Напоминаем, они подключаются так: RX модуля, подключается к TX Arduno (pin 1), a TX модуля к RX Arduino (pin 0).
- Вы не загрузили программу ручного управления в робота. По вопросу загрузки программ смотрите видео из трех шагов немного ниже.
- Вы не подключились к Bluetooth-модулю в приложении (подключенный модуль должен перестать часто моргать красным светодиодом — светодиод либо постоянно светится, либо мигает очень редко).
- Вы не задали отправляемые команды в настройках приложения.
Источник: labrazum.ru
Импорт, экспорт, копирование и отправка настроек роботов в приложении RoboCam

В прошлой статье, посвящённой программе RoboCam, было описано, как управлять роботом EV3 от первого лица. Но конструкции роботов и механизмов могут быть разными и для каждого необходимо своё уникальное управление. Если вы разработали нового робота, то встаёт вопрос, как поделиться сделанными настройками с другими людьми, перенести их на другой смартфон или просто копировать? Решение есть. В новой версии приложения RoboCam добавлены функции импорта, экспорта, копирования и отправки настроек роботов.
Статья описывает новые возможности, появившиеся в версии 1.1 приложения RoboCam. Все статьи посвященные приложению RoboCam вы можете найти здесь. Приложение RoboCam можно установить из магазина Google Play.
Экспорт настроек в файл
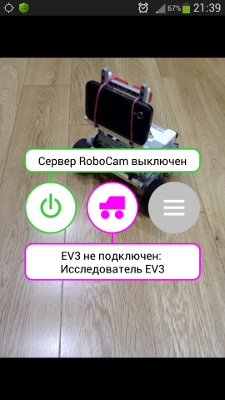
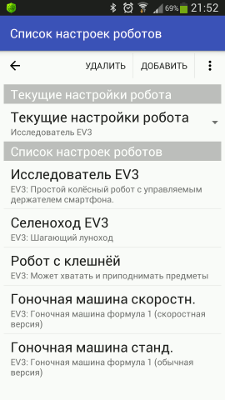
Сначала давайте посмотрим, как экспортировать настройки. Зайдите в настройки приложения RoboCam, для этого нажмите на серую кнопку справа.
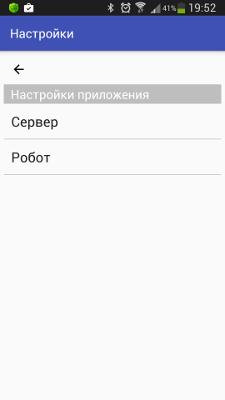
Затем выберите раздел «Робот».
Выберите настройку, которую вы хотите экспортировать, например, «Исследователь EV3».
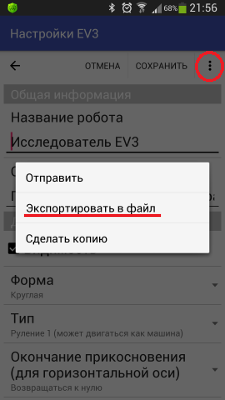
После того как на экране отобразились настройки робота. Коснитесь кнопки справа сверху с тремя точками и в появившемся меню выберите «Экспортировать в файл».
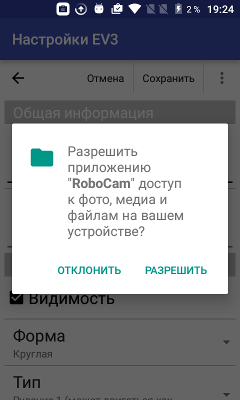
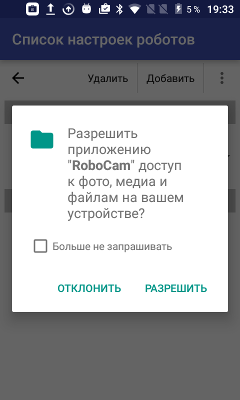
Если у вас Android версии 6 и выше, то вы можете увидеть вот такой запрос на разрешение доступа к общим папкам вашего смартфона, см. картинку ниже. Как правило, разрешение нужно дать только один раз, после чего Android запомнит ваш выбор. Нажмите «РАЗРЕШИТЬ».
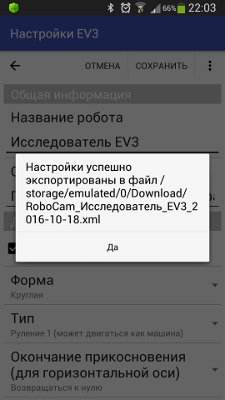
После этого настройки будут тут же записаны в файл, а на экране появится сообщение, где этот файл искать. Как видите, файл сохраняется в папке с загрузками, у меня это «/storage/emulated/0/Download». В начале имени всегда стоит префикс «RoboCam», затем имя настроек и текущая дата. Если произойдёт совпадение имени файла, например, если вы экспортируете настройки 2-й раз подряд, то предыдущий файл не будет перезаписан, а будет создан второй файл в той же папке с суффиксом 2 в имени, затем с суффиксом 3 и т.д.
Обратите внимание, что настройки будут записаны в файл с произведёнными несохранёнными изменениями. Например, если вы откроете настройки «Исследователь EV3», поменяете название робота на «Мой исследователь EV3», экспортируете настройки в файл и закроете настройки не сохраняя изменения, то в файле название робота будет «Мой исследователь EV3», а в настройках останется «Исследователь EV3».
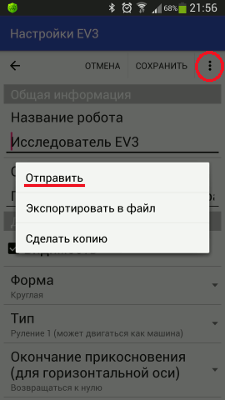
Отправка настроек робота
Теперь давайте научимся отправлять настройки на другой смартфон по Bluetooth или в письме по почте. Для этого нужно, так же как и в случае экспорта, открыть нужные настройки робота, коснуться кнопки с тремя точками сверху справа и выбрать пункт меню «Отправить».
Если у вас Android версии 6 и выше, то вы можете увидеть вот такой запрос на разрешение доступа к общим папкам вашего смартфона, см. картинку ниже. Как правило, разрешение нужно дать только один раз, после чего Android запомнит ваш выбор. Нажмите «РАЗРЕШИТЬ».
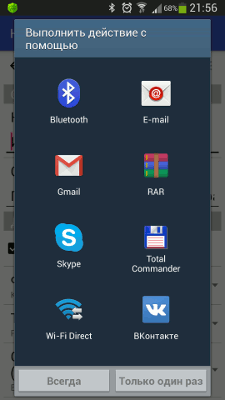
После этого появится диалог выбора устройства или приложения, с помощью которого нужно отправить файл. Здесь появятся не все возможные варианты, а только те, с помощью которых можно отправить xml-файл с настройками. Диалог, который вы видите на картинке ниже, будет различным в разных версиях Android. Выберите, как вы хотите отправить файл с настройками и далее действуйте, в зависимости от выбора и вашей версии Android. Подробнее об отправке файлов в Android смотрите в инструкции к своему устройству.
Обратите внимание, что настройки будут отправлены с произведёнными несохранёнными изменениями. Например, если вы откроете настройки «Исследователь EV3», поменяете название робота на «Мой исследователь EV3», отправите настройки и закроете настройки не сохраняя изменения, то будет отправлен файл с названием робота «Мой исследователь EV3», а в настройках останется «Исследователь EV3».
Учтите также, что отправляемый файл сохраняется в папке «/storage/emulated/0/.robocam» и если вы не дождавшись отправки, изменили настройки и отправляете их опять, то файл перезапишется и в итоге могут два раза отправиться изменённые настройки.
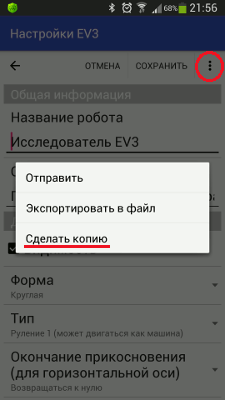
Создание копии настроек
Создать копию настроек может понадобиться вам, если вы хотите сделать настройки для нового робота на основе уже существующих настроек. Сделать копию очень просто. Для этого нужно, так же как и в случае экспорта, открыть нужные настройки робота, коснуться кнопки с тремя точками сверху справа и выбрать пункт меню «Сделать копию».
Сразу же после этого настройки будут скопированы, о чём вы увидите сообщение. Вернувшись к списку настроек, вы обнаружите сделанную копию.
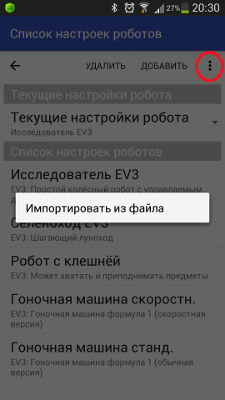
Импорт настроек
Импортировать настройки очень просто. Допустим, вы скачали файл и поместили его в папку загрузок «/storage/emulated/0/Download». Откройте список настроек роботов и нажмите на кнопочку с тремя точками справа сверху. В появившемся меню выберите «Импортировать из файла».
Если у вас Android версии 6 и выше, то вы можете увидеть вот такой запрос на разрешение доступа к общим папкам вашего смартфона, см. картинку ниже. Как правило, разрешение нужно дать только один раз, после чего Android запомнит ваш выбор. Нажмите «РАЗРЕШИТЬ».
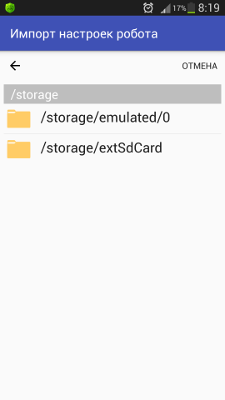
После этого появится навигатор по вашей файловой системе. Найдите с помощью него файл с настройками, который нужно импортировать. Нажимайте на папки, чтобы открывать их. Стрелочкой или кнопкой смартфона «Назад» выходите из папок. Кнопка «Отмена» сразу закрывает этот навигатор.
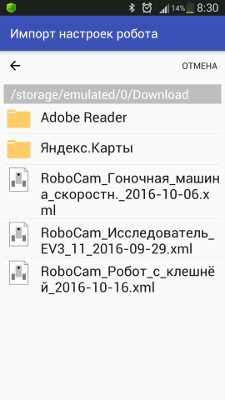
После того как вы нашли файлы с настройками, выберите тот, который нужно импортировать.
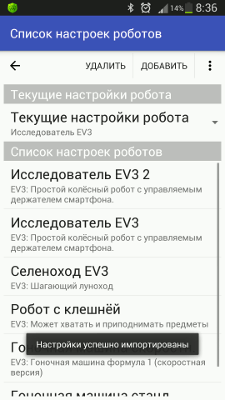
После этого настройки сразу импортируются, о чём вы увидите всплывающее сообщение, и вы увидите их в списке сверху. Как видите, к имени добавилась цифра 2. Если вы импортируете эти настройки ещё раз, то к имени добавится цифра 3 и т.д. После импорта настройками можно пользоваться.
После того как мы разобрались, как импортировать настройки, я предлагаю вам готовые настройки для нескольких роботов. Вы можете скачать их ниже. Также вы можете посмотреть видео, на которых видно как управлять роботами с помощью этих настроек.
Настройки для управления гоночной машиной формула 1 EV3
В этих настройках сделано три джойстика. Первые два джойстика – это вертикальный и горизонтальный джойстики. Один заставляет вращаться задние колёса машины, а второй служит как руль. Третий джойстик – это второй вариант управления. С ним вы одновременно можете управлять скоростью машины и поворотами.
Джойстиков специально сделано три, чтобы вы смогли понять, как происходит переключение между джойстиками 1-2 и 3-4. Смартфон я закрепил с помощью двух уголков и двух резинок так, чтобы в камеру смартфона попадали передние колёса, чтобы лучше ощущать габариты машины.
А вот и файлы с настройками для стандартного и скоростного вариантов машины:
Настройки RoboCam для гоночной машины формула 1 EV3.
Настройки RoboCam для гоночной машины формула 1 EV3 (скоростная версия).
Схему сборки гоночной машины и описание можете посмотреть здесь.
Настройки для управления роботом с клешнёй
Для управления роботом с клешнёй сделан круглый джойстик и стрелки. Круглый джойстик управляет движениями робота, т.е. колёсами, а стрелки – клешнёй. Смартфон я закрепил с помощью нескольких дополнительных деталей так, чтобы в камеру попадала клешня. Так сразу видно, что и как я хватаю.
Вот файл с настройками для робота с клешнёй:
Настройки RoboCam для робота с клешнёй EV3.
Схему сборки и описание для робота с клешнёй можете найти здесь.
Настройки для управления Селеноходом EV3
Управление Селеноходом немного сложнее, чем для предыдущих роботов. В качестве джойстиков здесь используются стрелки. Первый джойстик только передаёт координаты прикосновений в модуль EV3 (в почтовые ящики), и дальше эти координаты обрабатываются специально написанной программой внутри EV3. Поэтому чтобы робот двигался, на нём нужно запустить программу SelenokhodFPV.ev3 перед подключением приложения RoboCam к роботу. На видео также демонстрируется локальное подключение к серверу RoboCam, т.е. с того же смартфона.
Файл с настройками и программу для EV3 можете скачать ниже:
Настройки RoboCam для управления Селеноходом EV3.
Вспомогательная программа для управления Селеноходом EV3 с помощью RoboCam.
Для запуска программы требуется ПО LEGO Mindstorms Education EV3 версии 1.1.1 или выше.
Схему сборки и описание Селенохода EV3 можете посмотреть здесь.
Источник: www.proghouse.ru
Как загрузить данные в робота?

- Посетитель
- Пользователи
- 8 публикаций
У меня такая задумка — робот чтобы программу любого размера загрузить можно было в него но чтобы диска жёсткого в нем не было.
Собственно идея состоит в том чтобы в роботе был только eeprom и оперативная память. И робот как то извне загружает данные в память а потом их выполняет. Но единственное я не знаю как их в него передать — в мане вроде написано что робот не может взаимодействовать с другими компонентами напрямую.
Может быть можно передать в него код через метаданные блоков или что то такое?
Поделиться сообщением
Ссылка на сообщение
Поделиться на других сайтах
13 ответов на этот вопрос
- Сортировать по голосам
- Сортировать по дате
Рекомендуемые сообщения
Присоединяйтесь к обсуждению
Вы можете написать сейчас и зарегистрироваться позже. Если у вас есть аккаунт, авторизуйтесь, чтобы опубликовать от имени своего аккаунта.
Подписчики 0
Полезные ресурсы
Lua
Голосование
Информация
О нас
Проект ComputerCraft.ru основан в 2014 году. Особенностью наших игровых серверов является обязательное наличие компьютерных и технических модов и аддонов. Когда мод ComputerCraft устарел и больше не отвечал техническим требованиям, ему на замену пришел современный и высокотехнологичный мод OpenComputers. Черепашек заменили роботы из мода Opencomputers.
ComputerCraft.ru — это площадка для игры в Minecraft и общения на форуме, стабильные серверы и возможность в легкой и игровой форме обучиться программированию на языке Lua и реализовать все свои самые смелые инженерные идеи и решения и поделиться ими с другими игроками. За все время существования проекта сменилось 10 игровых серверов, которые посетили более 9000 игроков.
На сайте собрано множество интересных программ и библиотек, статей, гайдов, веселых историй и горячих обсуждений, выдвинуто множество идей автоматизации и способов программирования. У нас играют и пишут программы как новички так и опытные программисты. А самые продвинутые участники нашего коллектива даже разрабатывают собственные авторские моды и аддоны, ресурспаки, репозитории, мощнейшие библиотеки и операционные системы. Регистрируйтесь прямо сейчас и присоединяйтесь к нашему дружному коллективу фанатов игры Minecraft , компьютерных и инженерных модов!
Источник: computercraft.ru