

Достаточно часто в личке ко мне обращаются люди с просьбой дать ссылки на полезные сайты, нужную информацию по программированию микроконтроллеров, необходимые программы и т.п. находясь при этом в самом начале своего познания микроконтроллеров. Сам я проходил через это буквально полтора года назад, имея нулевые знания и знаю, насколько это сложно, дать себе первоначального пинка, разобраться в лавине информации по микроконтроллерам, которую выдают поисковики, когда на тебя обрушивается куча непонятной информации и т. п.
Постараюсь объяснить на простом языке, для людей, умеющих держать паяльник, знающих, что такое цифровая микросхема логики, умеющих читать схемы и пользоваться мультиметром.
Микроконтроллеры бывают разных фирм, которые делают одно и тоже дело, но разными методами. Сравнить это можно с человеческими расами: европейцы, китайцы и африканцы например. Я лично работаю с микроконтроллерами фирмы Атмел, про них и буду говорить. Ну уж пошло сравнение с расами, пускай это будут европейцы.) Программы для микроконтроллеров пишут на языках программирования.
Как просто научиться программировать микроконтроллеры PIC и AVR / Бегущие огни за 8 минут!
Я рекомендую начать с языка Си. Это древний и простой язык. Для написания текста програмы используют программы компиляторы. Они позволяют создавать, редактировать и переваривать написанный программистом текст программы в код (прошивку), который можно загрузить (прошить) в микроконтроллер. Таких программ есть множество.
Пример для Атмел: Code VisionAVR, родная от Атмел AVR Studio, Bascom-avr и ещё.
Эти программы делают одно и тоже дело, но своими методами, особенностями достоинствами и недостатками. При это текст Си в тих программах компиляторах немного отличается, но в общем похож. Можно сравнить с различием украинского, русского и белорусского языка. Я использую Code VisionAVR, что и советую начинающим.
Далее я приведу простой текст программы, написанный на языке Си в компиляторе Code VisionAVR для микроконтроллера ATTiny13A. В конце темы есть проект, прошивка и проект для эмулятора протеуса.
Микроконтроллер в этой программе умеет делать простую вещь: при помощи кнопки менять логическое состояние на двух выходах, при этом короткое нажатие меняет состояние первого выхода а длинное — второго. В автомобиле например эту схему можно применить для управления одной кнопкой обогревом заднего стекла (которая есть у многих штатно) и добавленным обогревом зеркал. Нажал коротко на кнопку — сработал обогрев стекла, нажал ещё — обогрев стекла выключился. Если нажать и удерживать кнопку, то через какое-то время включиться обогрев зеркал. Если нажать и удерживать кнопку повторно — обогрев зеркал отключится.
Для понятия текста нужно знать грамматику, правила писанины языка Си, этого материала в интернете предостаточно. Так же желательно ознакомиться хотя бы с материалом, по использованию мастера создания проектов в CodeVisionAVR.
Оператор else переводится не как ещё а как иначе
Оператор if и else всегда работают в паре, сначала идет if затем else. Оператор else можно не использовать совсем, если он не нужен.
В нашей ситуации алгоритм можно описать так:
если (нажата кнопка подключенная к порту PB0)
то выполняем кучку кода;
>
иначе (кнопка не нажата)
выполняем эту кучку кода;
>
Так как это все находится внутри главного цикла, то этот код будет выполняться по кругу, будет постоянно опрашиваться кнопка и будет выполняться нужная кучка кода
Теперь рассмотрим кучку кода, которая выполняется, если кнопка нажата:
Операторы можно вкладывать друг в друга, как матрешку. то есть выполняется одно условие, потом если условие сработало, то другое внутри первого условия и т.д.
Если переменное значение trig равняется нулю, то выполняем инкремент переменной b Инкремент — операция увеличения значения, хранящегося в переменной, на 1. То есть при проходе выполнения кода, если процессор натыкается на команду инкремента b++, то процессор прибавляет единичку в число, которое находится в переменной b
Так же здесь применяется упрощенная «орфография» написания условия и команды, без скобок и >:
Такое представление используют, если после условия всего одна команда.
Немного отвлеклись, возвращаемся:
if (trig==0) b++; — если значение переменной равно нулю (а оно у нас равно нулю) то выполняем инкремент переменной b — переменная в была равна нулю, теперь стало единице.
Если переменная b больше ста, то выполняем кучку кода внутри скобок.
Переменная b за каждый круг цикла прибавляется на единичку и в итоге через сто «кругов» главного цикла выполниться условие, которая находится далее внутри скобок и >
Теперь рассмотрим что же там делается, если нажата кнопка, если прошло сто кругов цикла:
if (PINB.2==0)PORTB.2=1;
else PORTB.2=0;
trig=1;
b=0;
Здесь мы видим ещё одно условие (жирная такая матрешка получилась))
if (PINB.2==0)PORTB.2=1;
Если регистр состояния выходного порта PB, а точнее PB2 равен нулю, то меняем его состояние на единичку PORTB.2=1.
else PORTB.2=0;
Иначе пишем в регистр нолик. Или если по-другому: если регистр состояния выходного порта PB2 равен единице, то меняем его на ноль.
Короче если происходит выполнение этих условий и команд, то меняется логическое состояние выхода 2 (PB2) на схеме.
Если полностью описать: если нажата кнопка, если прошло сто кругов главного цикла, то меняем логическое состояние выхода 2 — PORTB.2 в коде он же порт PB2 на схеме.
Как уже стало понятно этот кусок кода отрабатывает длительное нажатие кнопки.
Но этого мало, дальше ещё есть две выполняемые команды присвоения:
trig=1; присвоение единице этой переменной необходимо, что бы описанное выше условие работы инкремента b++ перестало работать
b=0; обнуляем переменную b.
В итоге при длительном нажатии кнопки, условие при котором меняется состояние порта PB2 выполняется единожды, до тех пор, пока кнопка не будет отжата кнопка, ибо инкремент не будет работать и условие if (b>100) больше не сработает, если тупо нажать кнопку и не отпускать совсем.
Теперь вторая часть кучки кода, которая следует за первым условием:
else
if (b>4)
if (PINB.1==0)PORTB.1=1;
else PORTB.1=0;
b=0;
>
b=0;
trig=0;
>
Если кнопка отжата:
Опишем её с конца:
trig=0; присваиваем переменной trig значение ноль. Необходимо, что бы после длительного нажатия, когда наступит последующее отжатие кнопки микроконтроллер снова был готов к нажатиям кнопки ( срабатывало условие инкремента if (trig==0) b++;)
b=0; При не нажатой кнопке значение переменной b равняется нулю.
if (b>4)
if (PINB.1==0)PORTB.1=1;
else PORTB.1=0;
b=0;
>
Подробнее:
if (b>4)
Если значение переменной b больше четырех, то выполняем следующий код:
if (PINB.1==0)PORTB.1=1;
else PORTB.1=0;
Если состояние порта BP1 равно нулю, то делаем единицу, если нет, то ноль.
Это условие и команда отрабатывает кроткое нажатие кнопки. Если нажата кнопка, то начинает работать инкремент b++; значение которого начинает увеличиваться. Если отжать кнопку и при этом значение переменной b будет больше четырех ( но меньше ста — а то сработает длинное нажатие) то состояние выходного порта PB1 (он же выход 1 на схеме, он же PORTB.1 в коде) поменяется, сработает алгоритм короткого нажатия кнопки.
Если значение переменной b при отжатии меньше четырех, то условие не срабатывает и ничего не происходит. необходимо для работы «дребезга контактов» и ложных срабатываний.
И последнее это присвоение переменной b нулевого значения, что бы обработка алгоритма короткого нажатия происходило единожды.
В оконцовке главного цикла виднеется команда:
Это задержка в главном цикле. То есть, выполняется пошагово команды, затем процессор натыкается на команду delay_ms(10); и начинает её выполнять. В итоге процессор будет 10 миллисекунд ждать и ничего не делать в этой строчке, затем опять приступит к выполнению команд.
Находясь в одном общем цикле, скорость нарастания значения инкремента b++ зависит от времени задержки, указанной в delay_ms.
Команда delay_ms находится в библиотеке задержек #include , которую мы для этого и включили в начале кода.
Как видно из описания, длинное нажатие срабатывает от фронта сигнала нажатия кнопки ( начинает работать инкремент) а короткое нажатие кнопки — по спаду, то есть срабатывает по отжатию кнопки.
Вообще выполняемая здесь последовательность: условие + инкремент достаточно часто используемая команда и в языке Си присутствует отдельный оператор для этого for
Архив с прошивкой, исходником и моделью Протеуса:
umat.ru/files/Button_13.zip
ВНИМАНИЕ!
Архив перезалил 22 сентября 2014 года, обнаружил косяк в выставленной частоте в проекте. Теперь тактовая частота 1.2 Мегагерца, при этом фьюзы стоят по дефолту и их при прошивке трогать вообще не надо
Источник: www.drive2.ru
Как написать код для AVR, программирование микроконтроллеров Atmel AVR на Си

Что такое микроконтроллер? Микроконтроллер это по сути микрокомпьютер с процессором, оперативной и постоянной памятью, портами ввода-вывода, во многих микроконтроллерах имеется аналого цифровой преобразователь.
Прежде всего для написания программ под Atmel AVR нужно установить программу Atmel Studio, скачать ее можно с официального сайта Atmel сайта Microchip (Microchip выкупил Atmel), программа полностью бесплатна:
Для того, чтобы проверить написанную программу и постоянно не собирать на настоящих физических компонентах для проверки — понадобится также программа, эмулирующая работу железа, и эта программа — это Proteus, но вот она уже не бесплатна.
(Примечание — иногда результат работы на реальном железе может отличаться от результата эмуляции железа, так что при окончательном, финальном варианте написанной программы, проверка на реальном железе — обязательна).
Atmel Studio установлена.
(если при запуске или установке возникает ошибка «Cannot find one or more components.Please reinstall the application» (Не найден один или несколько компонентов.Пожалуйста, переустановите приложение.)- необходимо удалить программу, переименовать папку C:ProgramDataPackage Cache (не следует ее удалять, так как в случае чего, можно ее снова переименовать в исходное имя, если некоторые приложения после этого перестали работать), тогда программа установится и запустится нормально).
В левом верхнем углу выбираем:
File => New => Project


Выбираем GCC C Executable Project(на изображении под цифрой 1), В низу, в поле Name(2) указываем имя нашего проекта, в поле Location(3) можем выбрать местоположение проекта или оставить путь по умолчанию, нажимаем OK.
Затем выбираем модель нашего микроконтроллера из списка, в нашем случае это ATMEGA8(можно выбрать Attiny13 или другой нужный и имеющийся у вас микроконтроллер):

В окне появится среда разработки написания кода, где уже будет стандартный код на Си и несколько закомментированных строк с указанием авторства и даты:

Под цифрой 1 находится окно написания кода, под цифрой 2 файлы с исходным кодом, библиотеки и все файлы, связанные с исходным кодом, в файле main.c находится текст нашего кода.
Что же делает этот код?
строка #include подключает стандартную библиотеку портов ввода, вывода микроконтроллеров AVR,
ее можно найти по пути(если вы не поменяли путь при установке) «C:Program FilesAtmelStudio7.0toolchainavr8avr8-gnu-toolchainavrincludeavr»
Функция main — стандартная входная функция Си, с который программа и начинает работу.
Внутри функции main находится цикл while, который длится бесконечно.
А в теле цикла ничего нет т.е. программа ничего не делает , просто идет бесконечный цикл, и выхода из функции main не происходит , поэтому там нет ключевого слова return, которое возвращает указанное значение.
Для того, чтобы скомпилировать написанный код, необходимо выбрать вверху Build => Build «Имя_Вашего_Проекта».
Если код без ошибок, то программа скомпилируется и внизу будет написано Build succeeded.

В итоге скомпилированная прошивка будет в формате .HEX и будет лежать по адресу(опять же, если вы не изменили стандартное месторасположение):
C:UsersИмя ПользователяDocumentsAtmel Studio7.0ИмяПроектаИмяПроектаDebugИмяПроекта.hex
Примечание.Если выбрать вариант сборки Release, то прошивка будет лежать в соответствующей папке т.е. не в папке Debug, а в папке Release.
Код , который ничего не делает это не очень интересно, напишем программу, которая мигает 2 раза в секунду светодиодом:
#define F_CPU 1000000UL // 1 MHz Здесь задаем частоту микроконтроллера #include //библиотека вводавывода #include //библиотека задержки int main(void) // начало основой программы { DDRD = 0xff; // установить все порты D(смотрите распиновку мк) как выводы while (1) { // бесконечный цикл PORTD = 0xff; // установить «1»(вкл) на всех линиях порта D _delay_ms(250); // ждем 250 миллисекуд PORTD = 0x00; // установить «0»(выкл) на всех линиях порта D _delay_ms(250); // ждем 250 миллисекунд } //закрывающая скобка бесконечного цикла } //скобка входной функции main
Компилируем код, получаем готовую прошивку.
Прошиваем этой прошивкой микроконтроллер, собираем схему на железе.
Если не знаете как прошивать, узнать можно здесь:
В следующей статье узнаем как проверить написанный код в Proteus т.е. будем эмулировать работу железа.
ОЦЕНИТЕ ДАННУЮ ПУБЛИКАЦИЮ:
Средний рейтинг / 5. Количество оценок:
Мы сожалеем, что эта публикация Вас не устроила.
Напишите, пожалуйста, что Вам конкретно не понравилось, как можно улучшить статью?(оценка будет засчитана только при наличии отзыва)
Источник: lampcore.ru
Python для микроконтроллеров. Учимся программировать одноплатные компьютеры на языке высокого уровня

Шутники говорят, что после трудового дня за компьютером типичный программист едет домой, садится за ПК и таким образом отдыхает. А ведь истина на самом деле куда ужаснее этой шутки: многие из нас, приходя с работы, посвящают оставшееся до сна время. программированию микроконтроллеров. Обывателям не понять, но Arduino, Teensy или ESP — действительно очень неплохое хобби.
Их единственный недостаток — необходимость программировать на достаточно низком уровне, если не на Assembler, то на Arduino C или Lua. Но теперь в списке ЯП для микроконтроллеров появился Python. Точнее, MicroPython. В этой статье я постараюсь максимально продемонстрировать его возможности.
С чего все началось?
Все началось с кампании на Kickstarter. Дэмьен Джордж (Damien George), разработчик из Англии, спроектировал микроконтроллерную плату, предназначенную специально для Python. И кампания «выстрелила». Изначально была заявлена сумма в 15 тысяч фунтов стерлингов, но в результате было собрано в шесть с половиной раз больше — 97 803 фунта стерлингов.
А чем эта плата лучше?
Автор проекта приводил целый ряд преимуществ своей платформы в сравнении с Raspberry Pi и Arduino:
- Мощность — MP мощнее в сравнении с микроконтроллером Arduino, здесь используются 32-разрядные ARM-процессоры типа STM32F405 (168 МГц Cortex-M4, 1 Мбайт флеш-памяти, 192 Кбайт ОЗУ).
- Простота в использовании — язык MicroPython основан на Python, но несколько упрощен, для того чтобы команды по управлению датчиками и моторами можно было писать буквально в несколько строк.
- Отсутствие компилятора — чтобы запустить программу на платформе MicroPython, нет необходимости устанавливать на компьютер дополнительное ПО. Плата определяется ПК как обычный USB-накопитель — стоит закинуть на него текстовый файл с кодом и перезагрузить, программа тут же начнет исполняться. Для удобства все-таки можно установить на ПК эмулятор терминала, который дает возможность вписывать элементы кода с компьютера непосредственно на платформу. Если использовать его, тебе даже не придется перезагружать плату для проверки программы, каждая строка будет тут же исполняться микроконтроллером.
- Низкая стоимость — в сравнении с Raspberry Pi платформа PyBoard несколько дешевле и, как следствие, доступнее.
- Открытая платформа — так же как и Arduino, PyBoard — открытая платформа, все схемы будут находиться в открытом доступе, что подразумевает возможность спроектировать и создать подобную плату самому в зависимости от потребностей.
И что, только официальная плата?
Нет. При всех своих достоинствах PyBoard (так называется плата от разработчика MicroPython) — довольно дорогое удовольствие. Но благодаря открытой платформе на многих популярных платах уже можно запустить MicroPython, собранный специально для нее. В данный момент существуют версии:
- для BBC micro:bit — британская разработка, позиционируется как официальное учебное пособие для уроков информатики;
- Circuit Playground Express — разработка известной компании Adafruit. Это плата, включающая в себя светодиоды, датчики, пины и кнопки. По умолчанию программируется с помощью Microsoft MakeCode for Adafruit. Это блочный (похожий на Scratch) редактор «кода»;
- ESP8266/ESP32 — одна из самых популярных плат для IoT-разработки. Ее можно было программировать на Arduino C и Lua. А сегодня мы попробуем установить на нее MicroPython.
Подготовка к работе
Перед тем как писать программы, нужно настроить плату, установить на нее прошивку, а также установить на компьютер необходимые программы.
![]()
INFO
Все примеры проверялись и тестировались на следующем оборудовании:
- плата NodeMCU ESP8266-12E;
- драйвер моторов L293D;
- I2C-дисплей 0,96″ 128 × 64;
- Adafruit NeoPixel Ring 16.
Прошивка контроллера
Для прошивки платы нам понадобится Python. Точнее, даже не он сам, а утилита esptool, распространяемая с помощью pip. Если у тебя установлен Python (неважно, какой версии), открой терминал (командную строку) и набери:
pip install esptool
После установки esptool надо сделать две вещи. Первое — скачать с официального сайта версию прошивки для ESP8266. И второе — определить адрес платы при подключении к компьютеру. Самый простой способ — подключиться к компьютеру, открыть Arduino IDE и посмотреть адрес в списке портов.
Для облегчения восприятия адрес платы в примере будет /dev/ttyUSB0 , а файл прошивки переименован в esp8266.bin и лежит на рабочем столе.
Открываем терминал (командную строку) и переходим на рабочий стол:
cd Desktop
Форматируем флеш-память платы:
esptool.py —port /dev/ttyUSB0 erase_flash
Если при форматировании возникли ошибки, значит, нужно включить режим прошивки вручную. Зажимаем на плате кнопки reset и flash. Затем отпускаем reset и, не отпуская flash, пытаемся отформатироваться еще раз.
И загружаем прошивку на плату:
esptool.py —port /dev/ttyUSB0 —baud 460800 write_flash —flash_size=detect 0 esp8266.bin
Взаимодействие с платой
Все взаимодействие с платой может происходить несколькими способами:
- через Serial-порт;
- через web-интерпретатор.
При подключении через Serial-порт пользователь в своем терминале (в своей командной строке) видит практически обычный интерпретатор Python.
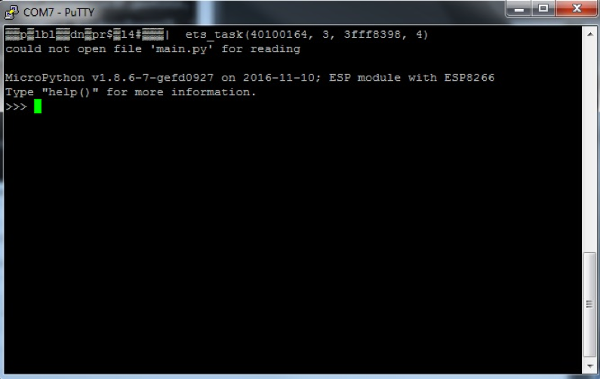
Для подключения по Serial есть разные программы. Для Windows можно использовать PuTTY или TeraTerm. Для Linux — picocom или minicom. В качестве кросс-платформенного решения можно использовать монитор порта Arduino IDE. Главное — правильно определить порт и указать скорость передачи данных 115200.
picocom /dev/ttyUSB0 -b115200
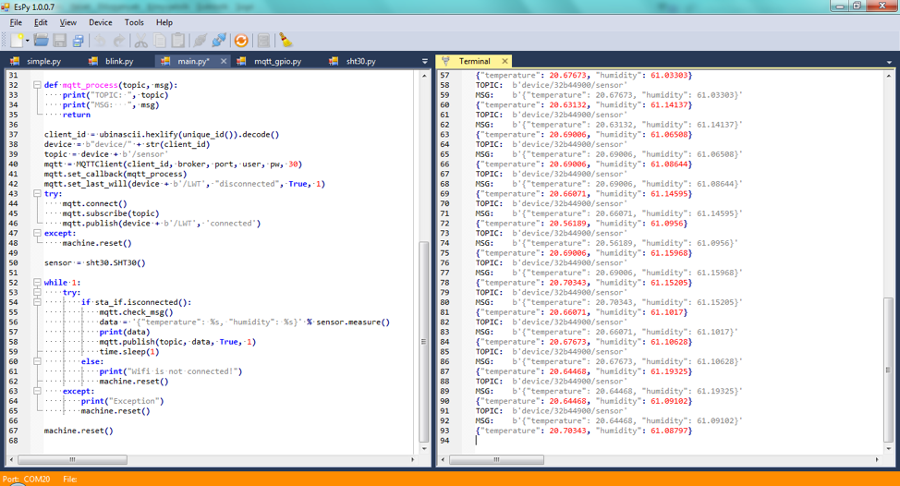
Кроме этого, уже создано и выложено на GitHub несколько программ, облегчающих разработку, например EsPy. Кроме Serial-порта, он включает в себя редактор Python-файлов с подсветкой синтаксиса, а также файловый менеджер, позволяющий скачивать и загружать файлы на ESP.
Но все перечисленные способы хороши лишь тогда, когда у нас есть возможность напрямую подключиться к устройству с помощью кабеля. Но плата может быть интегрирована в какое-либо устройство, и разбирать его только для того, чтобы обновить программу, как-то неоптимально. Наверное, именно для таких случаев и был создан WebREPL. Это способ взаимодействия с платой через браузер с любого устройства, находящегося в той же локальной сети, если у платы нет статического IP, и с любого компьютера, если такой IP присутствует. Давай настроим WebREPL. Для этого необходимо, подключившись к плате, набрать
import webrepl_setup
Появится сообщение о статусе автозапуска WebREPL и вопрос, включить или выключить его автозапуск.
WebREPL daemon auto-start status: enabled Would you like to (E)nable or (D)isable it running on boot? (Empty line to quit) >
После ввода q появляется сообщение о выставлении пароля доступа:
To enable WebREPL, you must set password for it New password (4-9 chars):
Вводим его, а затем подтверждаем. Теперь после перезагрузки мы сможем подключиться к плате по Wi-Fi.
Так как мы не настроили подключение платы к Wi-Fi-сети, она работает в качестве точки доступа. Имя Wi-Fi-сeти — MicroPython-******, где звездочками я заменил часть MAC-адреса. Подключаемся к ней (пароль — micropythoN ).
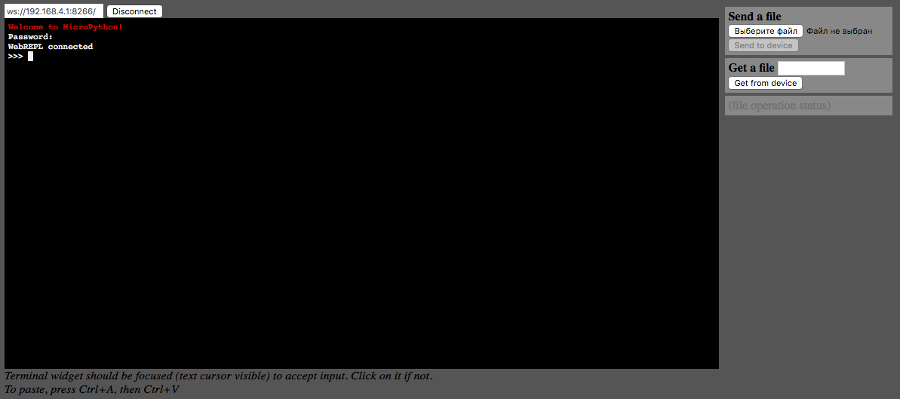
Открываем WebREPL и нажимаем на Connect. После ввода пароля мы попадаем в тот же интерфейс, что и при прямом подключении. Кроме этого, в WebREPL есть интерфейс для загрузки файлов на плату и скачивания файлов на компьютер.
![]()
INFO
Среди файлов, загруженных на плату, есть стандартные:
- boot.py — скрипт, который загружается первым при включении платы. Обычно в него вставляют функции для инициализации модулей, подключения к Wi-Fi и запуска WebREPL;
- main.py — основной скрипт, который запускается сразу после выполнения boot.py , в него записывается основная программа.
Начинаем разработку
Hello world
Принято, что первой написанной на новом языке программирования должна быть программа, выводящая Hello world. Не будем отходить от традиции и выведем это сообщение с помощью азбуки Морзе.
import machine import time pin = machine.Pin(2,machine.Pin.OUT) def dot_show(): pin.off() time.sleep(1) pin.on() def dash_show(): pin.off() time.sleep(2) pin.on() Hello_world = ‘**** * *-** *-** — *— — *-* *-** -**’ for i in Hello_world: if i==»*»: dot_show() elif i==’-‘: dash_show() else: time.sleep(3) time.sleep(0.5)
Итак, что же происходит? Сначала подключаются библиотеки: стандартная Python-библиотека time и специализированная machine. Эта библиотека отвечает за взаимодействие с GPIO.
Стандартный встроенный светодиод располагается на втором пине. Подключаем его и указываем, что он работает на выход. Если бы у нас был подключен какой-нибудь датчик, то мы бы указали режим работы IN.
Следующие две функции отвечают за включение и выключение светодиода на определенный интервал времени. Наверное, интересно, почему я сначала выключаю светодиод, а потом включаю? Мне тоже очень интересно, почему сигнал для данного светодиода инвертирован. Оставим это на совести китайских сборщиков. На самом деле команда pin.off() включает светодиод, а pin.on() — отключает.
Ну а дальше все просто: заносим в переменную Hello_world нашу строчку, записанную кодом Морзе, и, пробегаясь по ней, вызываем ту или иную функцию.
Присоединяйся к сообществу «Xakep.ru»!
Членство в сообществе в течение указанного срока откроет тебе доступ ко ВСЕМ материалам «Хакера», позволит скачивать выпуски в PDF, отключит рекламу на сайте и увеличит личную накопительную скидку! Подробнее
Источник: xakep.ru