
CUDA, Compute Unified Device Architecture — программно-аппаратная архитектура, позволяющая производить вычисления с использованием графических процессоров NVIDIA, поддерживающих технологию GPGPU (произвольных вычислений на видеокартах). Впервые появились на рынке с выходом чипа NVIDIA восьмого поколения — G80 и присутствует во всех последующих сериях графических чипов, которые используются в семействах ускорителей GeForce, Quadro и NVidia Tesla.
CUDA SDK позволяет программистам реализовывать на специальном упрощённом диалекте языка программирования Си алгоритмы, выполнимые на графических процессорах NVIDIA, и включать специальные функции в текст программы на Cи. CUDA даёт разработчику возможность по своему усмотрению организовывать доступ к набору инструкций графического ускорителя и управлять его памятью, организовывать на нём сложные параллельные вычисления.
ИСТОРИЯ
Направление вычислений эволюционирует от “централизованной обработки данных” на центральном процессоре до “совместной обработки” на CPU и GPU. Для реализации новой вычислительной парадигмы компания NVIDIA изобрела архитектуру параллельных вычислений CUDA, на данный момент представленную в графических процессорах GeForce, ION, Quadro и Tesla и обеспечивающую необходимую базу разработчикам ПО.
Learn to use a CUDA GPU to dramatically speed up code in Python.
Говоря о потребительском рынке, стоит отметить, что почти все основные приложения для работы с видео уже оборудованы, либо будут оснащены поддержкой CUDA-ускорения, включая продукты от Elemental Technologies, MotionDSP и LoiLo.
Область научных исследований с большим энтузиазмом встретила технологию CUDA. К примеру, сейчас CUDA ускоряет AMBER, программу для моделирования молекулярной динамики, используемую более 60000 исследователями в академической среде и фармацевтическими компаниями по всему миру для сокращения сроков создания лекарственных препаратов.
На финансовом рынке компании Numerix и CompatibL анонсировали поддержку CUDA в новом приложении анализа риска контрагентов и достигли ускорения работы в 18 раз. Numerix используется почти 400 финансовыми институтами.
Показателем роста применения CUDA является также рост использования графических процессоров Tesla в GPU вычислениях. На данный момент более 700 GPU кластеров установлены по всему миру в компаниях из списка Fortune 500, таких как Schlumberger и Chevron в энергетическом секторе, а также BNP Paribas в секторе банковских услуг.
Благодаря ожидаемым в ближайшем будущем системам Microsoft Windows 7 и Apple Snow Leopard, вычисления на GPU займут свои позиции в секторе массовых решений. В этих новых операционных системах GPU предстанет не только графическим процессором, но также и универсальным процессором для параллельных вычислений, работающим с любым приложением.
Состав NVIDIA CUDA
CUDA включает два API: высокого уровня (CUDA Runtime API) и низкого (CUDA Driver API), хотя в одной программе одновременное использование обоих невозможно, нужно использовать или один или другой. Высокоуровневый работает “сверху” низкоуровневого, все вызовы runtime транслируются в простые инструкции, обрабатываемые низкоуровневым Driver API. Но даже “высокоуровневый” API предполагает знания об устройстве и работе видеочипов NVIDIA, слишком высокого уровня абстракции там нет.
Разработка на CUDA
Есть и ещё один уровень, даже более высокий — две библиотеки:
CUBLAS — CUDA вариант BLAS (Basic Linear Algebra Subprograms), предназначенный для вычислений задач линейной алгебры и использующий прямой доступ к ресурсам G PU;
CUFFT — CUDA вариант библиотеки Fast Fourier Transform для расчёта быстрого преобразования Фурье, широко используемого при обработке сигналов. Поддерживаются следующие типы преобразований: complex-complex (C2C), real-complex (R2C) и complex-real (C2R).
Рассмотрим эти библиотеки подробнее. CUBLAS — это переведённые на язык CUDA стандартные алгоритмы линейной алгебры, на данный момент поддерживается только определённый набор основных функций CUBLAS.
Библиотеку очень легко использовать: нужно создать матрицу и векторные объекты в памяти видеокарты, заполнить их данными, вызвать требуемые функции CUBLAS, и загрузить результаты из видеопамяти обратно в системную. CUBLAS содержит специальные функции для создания и уничтожения объектов в памяти GPU, а также для чтения и записи данных в эту память. Поддерживаемые функции BLAS: уровни 1, 2 и 3 для действительных чисел, уровень 1 CGEMM для комплексных. Уровень 1 — это векторно-векторные операции, уровень 2 — векторно-матричные операции, уровень 3 — матрично-матричные операции.
CUFFT — CUDA вариант функции быстрого преобразования Фурье — широко используемой и очень важной при анализе сигналов, фильтрации и т.п. CUFFT предоставляет простой интерфейс для эффективного вычисления FFT на видеочипах производства NVIDIA без необходимости в разработке собственного варианта FFT для GPU. CUDA вариант FFT поддерживает 1D, 2D, и 3D преобразования комплексных и действительных данных, пакетное исполнение для нескольких 1D трансформаций в параллели, размеры 2D и 3D трансформаций могут быть в пределах [2, 16384], для 1D поддерживается размер до 8 миллионов элементов.
Среда программирования
В состав CUDA входят runtime библиотеки:
Основной процесс приложения CUDA работает на универсальном процессоре (host), он запускает несколько копий процессов kernel на видеокарте. Код для CPU делает следующее: инициализирует GPU, распределяет память на видеокарте и системе, копирует константы в память видеокарты, запускает несколько копий процессов kernel на видеокарте, копирует полученный результат из видеопамяти, освобождает память и завершает работу.
В качестве примера для понимания приведем CPU код для сложения векторов, представленный в CUDA:
Функции, исполняемые видеочипом, имеют следующие ограничения: отсутствует рекурсия, нет статических переменных внутри функций и переменного числа аргументов. Поддерживается два вида управления памятью: линейная память с доступом по 32-битным указателям, и CUDA-массивы с доступом только через функции текстурной выборки .
Программы на CUDA могут взаимодействовать с графическими API: для рендеринга данных, сгенерированных в программе, для считывания результатов рендеринга и их обработки средствами CUDA (например, при реализации фильтров постобработки). Для этого ресурсы графических API могут быть отображены (с получением адреса ресурса) в пространство глобальной памяти CUDA. Поддерживаются следующие типы ресурсов графических API: Buffer Objects (PBO / VBO) в OpenGL, вершинные буферы и текстуры (2D, 3D и кубические карты) D irect3D9.
Стадии компиляции CUDA-приложения:
Файлы исходного кода на CUDA C компилируются при помощи программы NVCC, которая является оболочкой над другими инструментами, и вызывает их: cudacc, g++, cl и др. NVCC генерирует: код для центрального процессора, который компилируется вместе с остальными частями приложения, написанными на чистом Си, и объектный код PTX для видеочипа. Исполнимые файлы с кодом на CUDA в обязательном порядке требуют наличия библиотек CUDA runtime library (cudart) и CUDA core library (cuda).
Практические выводы
CUDA — это доступная каждому разработчику ПО технология, её может использовать любой программист, знающий язык Си. Придётся только привыкнуть к иной парадигме программирования, присущей параллельным вычислениям. Но если алгоритм в принципе хорошо распараллеливается, то изучение и затраты времени на программирование на CUDA вернутся в многократном размере.
Вполне вероятно, что в силу широкого распространения видеокарт в мире, развитие параллельных вычислений на GPU сильно повлияет на индустрию высокопроизводительных вычислений. Эти возможности уже вызвали большой интерес в научных кругах, да и не только в них. Ведь потенциальные возможности ускорения хорошо поддающихся распараллеливанию алгоритмов (на доступном аппаратном обеспечении, что не менее важно) сразу в десятки раз бывают не так часто.
Определение функций
Перед функциями в .cu файле могут стоять следующие “модификаторы”:
__device__ — это означает, что функция выполняется только на видеокарте. Из программы выполняющейся на обычном процессоре(host) её вызвать нельзя.
__global__ — Эта функция — начало вашего вычислительного ядра. Выполняется на видеокарте, но запускается только с хоста.
__host__ — Выполняется и запускается только с хоста (т.е. обычная функция C++). Если вы перед функцией укажите например __host__ и __device__ — то будут скомпилированы 2 версии функции (не все комбинации допустимы).
__device__ — означает что переменная находится в глобальной памяти видеокарты (т.е. которой там 512-1024Мб и выше). Очень медленная память по меркам вычислений на видеокарте(хоть и быстрее памяти центрального процессора в несколько раз), рекомендуется использовать как можно реже. В этой памяти данные сохраняются между вызовами разных вычислительных ядер. Данные сюда можно записывать и читать из host-части с помощью
cudaMemcpy(device_variable, host_variable, size, cudaMemcpyHostToDevice); //cudaMemcpyDeviceToHost — в обратную сторону
__constant__ — задает переменную в константной памяти. Следует обратить внимание, что значения для констант нужно загружать функцией cudaMemcpyToSymbol. Константы доступны из всех тредов, скорость работы сравнима с регистрами(когда в кеш попадает).
__shared__ — задает переменную в общей памяти блока тредов (т.е. и значение будет общее на всех). Тут нужно подходить с осторожностью — компилятор агрессивно оптимизирует доступ сюда(можно придушить модификатором volatile), можно получать race condition, нужно использовать __syncthreads(); чтобы данные гарантированно записались. Shared memory разделена на банки, и когда 2 потока одновременно пытаются обратиться к одному банку, возникает bank conflict и падает скорость.
Все локальные переменные которые вы определеили в ядре (__device__) — в регистрах, самая высокая скорость доступа.
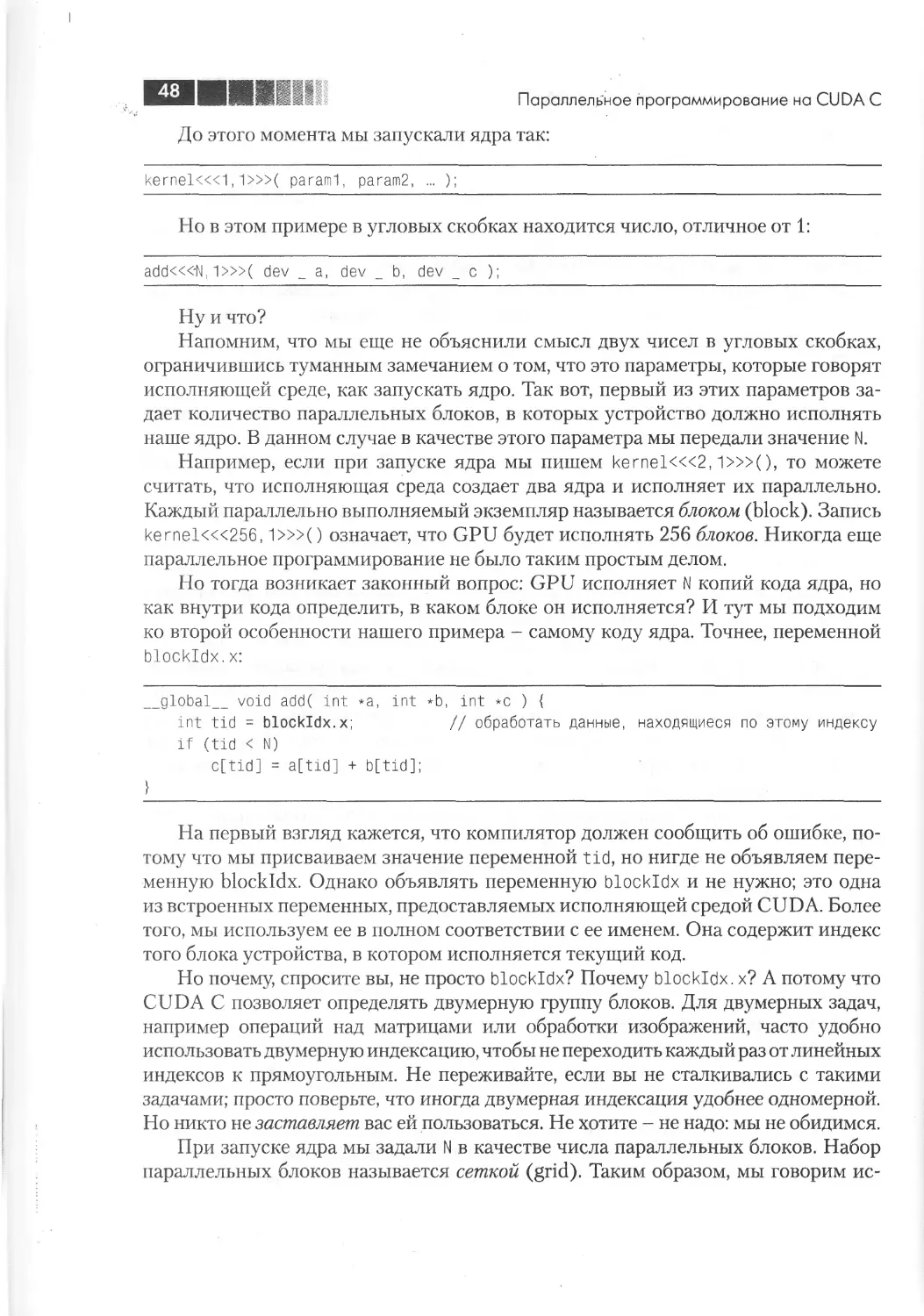
Как поток узнает над чем ему работать
Допустим, надо сделать какую-то операцию над картинкой 200×200. Картинка разбивается на куски 10×10, и на каждый пиксел такого кусочка запускаем по потоку. Выглядить это будет так:
dim3 th reads(10, 10);//размер квардатика, 10*10
dim3 grid(20, 20);//сколько квадратиков нужно чтобы покрыть все изображение
your_kernel>>(image, 200,200);//Эта строка запустит 40’000 потоков (не одновременно, одновременно работать будет 200-2000 потоков примерно).
В отличии от Brook+ от AMD, где мы сразу определяем какому потоку над какими данными работать, в CUDA все не так: передаваеиые kernel-у параметры одинаковые для всех потоков, и поток должен сам получить данные для себя, чтобы сделать это, потоку нужно вычислить, в каком месте изображения он находится. В этом помогают магические переменные blockDim, blockIdx.
const int ix = blockDim.x * blockIdx.x + threadIdx.x;
const int iy = blockDim.y * blockIdx.y + threadIdx.y;
В ix и iy — координаты, с помощью которых можно получить исходные данные из массива image, и записать результат работы.
Пару слов о том, как не сделать вашу программу очень медленной (написать программу работающую медленее чем CPU намного проще, чем работающую в 10 раз быстрее.
•Как можно меньше используйте __global__ память.
•При работе с __shared__ памятью избегайте конфлктов банков (впрочем многие задачи могут быть решены без shared памяти).
•Как можно меньше ветвлений в коде, где разные потоки идут по разным путям. Такой код не выполняется параллельно.
•Используйте как можно меньше памяти. Чем меньше памяти вы используете, тем агрессивнее компилятор и железо смогут запускать ваш kernel (например он может взять 100 тредов, и используя в 100 больше регистров запустить одновременно на одном MP, радикально уменьшая задержки)
Примеры Программ на CUDA C++
A[n][n] – матрица размерности n x n;
b[n] – вектор, состоящий из n элементов.
c[n] – вектор из n элементов.
//Последовательный алгоритм умножения матрицы на вектор
Теперь рассмотрим решение этой задачи на видеокарте. Следующий код иллюстрирует пример вызова функции CUDA:
// обычные массивы в оперативной памяти
h_a = new float[Size*Size];
h_b = new float[Size];
h_c = new float[Size];
// указатели на массивы в видеопамяти
// копирование из оперативной памяти в видеопамять
CUDA_SAFE_CALL(cudaMemcpy(d_a, h_a, sizeof(float)*Size*Size,
CUDA_SAFE_CALL(cudaMemcpy(d_b, h_b, sizeof(float)*Size,
// установка количества блоков
dim3 grid((Size+255)/256, 1, 1);
// установка количества потоков в блоке
dim3 threads(256, 1, 1);
// копирование из видеопамяти в оперативную память
CUDA_SAFE_CALL(cudaMemcpy(h_c, d_c, sizeof(float)*Size,
В принципе структуру любой программы с использованием CUDA можно представить аналогично рассмотренному выше примеру. Таким образом, можно предложить следующую последовательность действий:
1. инициализация CUDA
2. выделение видеопамяти для хранения данных программы
3. копирование необходимых для работы функции данных из оперативной памяти в видеопамять
4. вызов функции CUDA
5. копирование возвращаемых данных из видеопамяти в оперативную
6. освобождение видеопамяти
Пример функции, исполнимой на видеокарте
extern «C» __global__ void MatrVectMul(float *d_c, float *d_a, float *d_b, int Size)
int i = blockIdx.x*blockDim.x+threadIdx.x;
threadIdx.x – идентификатор потока в блоке по координате x,
blockIdx.x – идентификатор блока в гриде по координате x,
blockDim.x – количество потоков в одном блоке.
Пока же следует запомнить, что таким образом получается уникальный идентификатор потока (в данном случае i), который можно использовать в программе, работая со всеми потоками как с одномерным массивом.
Важно помнить, что функция, предназначенная для исполнения на видеокарте, не должна обращать к оперативной памяти. Подобное обращение приведет к ошибке. Если необходимо работать с каким-либо объектом в оперативной памяти, предварительно его надо скопировать в видеопамять, и обращаться из функции CUDA к этой копии.
Среди основных особенностей CUDA следует отметить отсутствие поддержки двойной точности (типа double). Также для функций CUDA установлено максимальное время исполнения, отсутствует рекурсия, нельзя объявить функцию с переменным числом аргументов.
Следует отметить следующее, что функция, работающая на видеокарте, должна выполняться не более 1 секунды. Иначе, функция будет не завершена, и программа завершится с ошибкой.
Для синхронизации потоков в блоке существует функция __syncthreads(), которая ждет, пока все запущенные потоки отработают до этой точки. Функция __syncthreads() необходима, когда данные, обрабатываемые одним потоком, затем используются другими потоками.
Замер времени в CUDA
Для измерения времени выполнения отдельных частей программы и анализа скорости выполнения того или иного участка кода удобно использовать встроенные в CUDA функции по замеру времени.
unsigned int timer;
… // код, время исполнения которого необходимо замерить
Источник: www.bourabai.ru
Программирование графических процессоров (nvidia cuda)
Цель: Ознакомиться с технологией NVIDIA CUDA. Научиться компилировать и запускать программы, содержащие CUDA- код.
Теоретические сведения
CUDA (англ. Compute Unified Device Architecture) — технология GPGPU (англ. General-Purpose computing on Graphics Processing Units – вычисления общего назначения на графических процессорах), позволяющая программистам реализовывать на упрощённом языке программирования Си алгоритмы, выполнимые на графических процессорах видеокарт GeForce восьмого поколения и старше. Технология CUDA разработана компанией Nvidia.
Фактически CUDA позволяет включать в текст Си программы специальные функции. Эти функции пишутся на упрощённом языке программирования Си и выполняются на графических процессорах Nvidia.
Чтобы понять, какие преимущества приносит перенос расчётов на видеокарты, приведём усреднённые цифры, полученные исследователями по всему миру. В среднем, при переносе вычислений на GPU, во многих задачах достигается ускорение в 5-30 раз, по сравнению с быстрыми универсальными процессорами.
Состав nvidia cuda
CUDA включает два API: высокого уровня (CUDA Runtime API) и низкого (CUDA Driver API), хотя в одной программе одновременное использование обоих невозможно, нужно использовать или один или другой. Высокоуровневый работает «сверху» низкоуровневого, все вызовы runtime транслируются в простые инструкции, обрабатываемые низкоуровневым Driver API. Но даже «высокоуровневый» API предполагает знание основ об устройстве и работе видеокарт NVIDIA.

Есть и ещё один уровень, даже более высокий — две библиотеки:
CUBLAS — CUDA вариант BLAS (Basic Linear Algebra Subprograms), предназначенный для вычислений задач линейной алгебры и использующий прямой доступ к ресурсам GPU;
CUFFT — CUDA вариант библиотеки Fast Fourier Transform для расчёта быстрого преобразования Фурье, широко используемого при обработке сигналов. Поддерживаются следующие типы преобразований: complex-complex (C2C), real-complex (R2C) и complex-real (C2R).
Написание программ на cuda
Для разработки собственных программ следует разбираться в базовых архитектурных особенностях видеочипов NVIDIA. Все инструкции в видеокарте выполняются по принципу SIMD, когда одна инструкция применяется ко всем потокам в warp (в CUDA это группа из 32 потоков — минимальный объём данных, обрабатываемых мультипроцессорами). Этот способ выполнения назвали SIMT (single instruction multiple threads — одна инструкция и много потоков).
При исполнении программы, центральный процессор выполняет свои порции кода, а GPU выполняет CUDA код с наиболее тяжелыми параллельными вычислениями. Эта часть, предназначенная для GPU, называется ядром (kernel). В ядре определяются операции, которые будут исполнены над данными.
Таким образом, CUDA использует параллельную модель вычислений, когда каждый из SIMD процессоров выполняет ту же инструкцию над разными элементами данных параллельно. GPU является вычислительным устройством(device) для центрального процессора(host), обладающим собственной памятью и обрабатывающим параллельно большое количество потоков. Ядром (kernel) называется функция для GPU, исполняемая потоками. Видеочип отличается от CPU тем, что может обрабатывать одновременно сотни тысяч потоков, что обычно для графики, которая хорошо распараллеливается.
Модель программирования в CUDA предполагает группирование потоков. Потоки объединяются в блоки потоков (thread block) — одномерные или двумерные сетки потоков, взаимодействующих между собой при помощи разделяемой памяти и точек синхронизации. Программа (ядро, kernel) исполняется над сеткой (grid) блоков потоков (thread blocks), см. рисунок ниже. Одновременно исполняется одна сетка. Каждый блок может быть одно-, двух- или трехмерным по форме, и может состоять из 512 потоков на текущем аппаратном обеспечении.
Источник: studfile.net
Как написать программу на cuda





























































































































































































































Download Close
ISBN: 978-5-94074-504-4
Year: 2011



Источник: djvu.online