
В связи с потребностью в модернизации отечественного инженерного корпуса, приведением его в соответствие с новыми технологическими реалиями технология стала исключительна важна для общего и профессионального образования. Более того, технологический образ мышления становится в современном обществе общепрофессиональным и общекультурным феноменом, который необходимо поддерживать на уровне общего образования.
Все это говорит о том, что учебная дисциплина «Технология», наряду с предметами «Математика» и «Информатика», становится важнейшим метапредметом в системе общего образования.
Скачать:
Предварительный просмотр:
В связи с потребностью в модернизации отечественного инженерного корпуса, приведением его в соответствие с новыми технологическими реалиями технология стала исключительна важна для общего и профессионального образования. Более того, технологический образ мышления становится в современном обществе общепрофессиональным и общекультурным феноменом, который необходимо поддерживать на уровне общего образования.
Компоненты робота и этапы его проектирования
Все это говорит о том, что учебная дисциплина «Технология», наряду с предметами «Математика» и «Информатика», становится важнейшим метапредметом в системе общего образования.
- выявление личностных и общественных потребностей, характерных для индустриального и информационного общества, выделение личностных и общественных приоритетов;
- освоение на общеобразовательном уровне методов и средств преобразовательской деятельности человека, направленных на удовлетворение потребностей;
- овладение необходимыми в повседневной жизни базовыми (безопасными) приёмами ручного и механизированного труда с использованием распространённых инструментов, механизмов и машин, способами управления отдельными видами бытовой техники;
- развитие познавательных интересов, технического мышления, пространственного воображения, интеллектуальных, творческих, коммуникативных и организаторских способностей;
- формирование опыта самостоятельной проектно-исследовательской деятельности.
Согласно ФГОС, фундаментальной задачей общего образования является освоение учащимися наиболее значимых аспектов реальности. К таким аспектам, несомненно, относится и преобразовательная деятельность человека.
Если традиционный подход к школьному технологическому образованию заключался в изучении некоторых традиционных материалов (бумаги, ткани, дерева, металла и др.), а также решении ряда бытовых задач (ремонт квартирной электропроводки, сельскохозяйственные работы и др.), которые позволяли непосредственно реализовать преобразовательскую деятельность учащихся. Развитие же информационных и коммуникационных технологий привело к существенному доминированию информационной сферы над вещественно энергетической. Дальнейшее развитие технологической сферы связано, прежде всего, с конвергенцией материальных и информационных технологий, воплощенных, в частности, в робототехнике. Таким образом, ключевым методическим инструментом предмета «Технология» должен стать робототехнический комплекс, с помощью которого можно продемонстрировать возможности конвергентных технологий и освоить навыки моделирования, конструирования и проектирования. На основе робототехнического конструктора можно не только конструировать модели, но и решать практико-ориентированные задачи, реализовывать творческие проекты.
Процесс моделирования робототехнических систем
Актуальность развития этой темы заключается в том, что в настоящий момент в России развиваются нанотехнологии, электроника, механика и программирование. Республика Татарстан является одним из передовых республик по использованию IT – технологий. В ключевых отраслях современного производства Республики Татарстан, в том числе Агрызского района в системе трудовых ресурсов резко уменьшилось число квалифицированных рабочих и специалистов, компетентных в освоении техники и технологий производства. Исходя из вышесказанного, возникает необходимость популяризировать и расширять знания учащихся по робототехники, знакомить учащихся с новыми профессиями из атласа профессий «Иннополис», «IT парк» проектировщик промышленной робототехники, проектировщик домашних роботов и др., нацеливать их на выбор профессии, связанной с инженерным направлением.
Общая характеристика учебного предмета, курса.
Робототехника является одним из важнейших направлений научно-технического прогресса, в котором проблемы механики и новых технологий соприкасаются с проблемами искусственного интеллекта.
Успехи страны в XXI веке будут определять не природные ресурсы, а уровень интеллектуального потенциала, который определяется уровнем самых передовых на сегодняшний день технологий. Уникальность образовательной робототехники заключается в возможности объединить конструирование и программирование в одном курсе, что способствует интегрированию преподавания информатики, математики, физики, черчения, естественных наук с развитием инженерного мышления, через техническое творчество. Техническое творчество — мощный инструмент синтеза знаний, закладывающий прочные основы системного мышления. Таким образом, инженерное творчество и лабораторные исследования — многогранная деятельность, которая должна стать составной частью повседневной жизни каждого обучающегося.
Педагогическая целесообразность этой программы заключается в том что, она является целостной и непрерывной в течении всего процесса обучения, и позволяет школьнику шаг за шагом раскрывать в себе творческие возможности и само реализоваться в с современном мире.
В ходе данной дисциплины подробно рассматриваются вопросы проектирования роботов и их последующего программирования. Она способствует формированию системы технологических знаний о проектировании и создании роботов. Конструктор Лего предоставляет ученикам возможность приобретать важные знания, умения и навыки в процессе создания, программирования и тестирования роботов. Конструктор Лего и программное обеспечение к нему предоставляет прекрасную возможность учиться ребенку на собственном опыте. Такие знания вызывают у детей желание двигаться по пути открытий и исследований, а любой признанный и оцененный успех добавляет уверенности в себе.
Ценна практическая направленность дисциплины на связь изучаемого материала с жизнью. Преподавание дисциплины направлено на профориентационную работу. Ученики знакомятся с рядом новых профессий, видят значимость и место роботостроения в сфере обслуживания, производства и т. д. Много внимания уделяется истории происхождения роботов, программирования и связи их с окружающим миром.
Технология роботостроения изучается на примере внедрений образовательной робототехники в Республике Татарстан, то есть учитывается региональный компонент содержания образования. Это, несомненно, способствует развитию познавательного интереса учащихся.
Содержание и структура учебной дисциплины «Технология+Робототехника» направлены на формирование устойчивых представлений о робототехнических устройствах, как едином изделии определенного функционального назначения и с определенными техническими характеристиками.
Новые ФГОС требуют освоения основ конструкторской и проектно-исследовательской деятельности, и программы по робототехнике полностью удовлетворяют эти требования.
Распределение учебного времени между видами учебной деятельности:
- ручной труд — 20%;
- конструирование моделей с использованием робототехнического конструктора -30%;
- решение практико-ориентированных задач — 30%;
- осуществление творческих проектов -20 %.
В целом же использование робототехнического конструктора на уроках технологии составляет 50% учебного времени.
Программа по технологии составлена из расчёта
2 часа в неделю, 70 часов в год, в 5-7 классах и
1 час в неделю, 35 часов в год в 8 классе.
По завершении изучения технологии у школьников должна быть сформирована технологическая грамотность, как необходимый компонент общей культуры и пропедевтика инженерной культуры.
Логика развития сформулированного подхода выглядит следующим образом.
Точку «входа» в учебный предмет «Технология» в 5 классе целесообразно связать с понятием алгоритма и исполнителя, которые могут параллельно осваиваться на уроках информатики (или даже известны из начальной школы). Переход от алгоритмов к технологиям представляется вполне естественным и оправданным.
Понятие компьютерного исполнителя целесообразно последовательно расширить сначала до механического (но уже готового) исполнителя, перемещающегося в соответствии с компьютерной программой (например, роботом Maway), а затем до робота, который учащийся может (в будущем) самостоятельно сконструировать и запрограммировать.
Уже в 5-ом классе целесообразно представить общую структуру технологии: этапы, операции, действия, а также обозначить понятия исходного материала, инструмента и конечного продукта, изделия.
Поскольку изучение материалов и инструментов выстраивается в логике освоения структуры технологии, их целесообразно изучать параллельно:
бумагу и картон, ткани, древесину, металлы.
В конце каждого учебного года целесообразно провести по одному занятию по темам: «учись учиться», где последовательно раскрывается смысл технологии самостоятельного получения знаний, развивается умение учиться; «учиться оберегать», в котором целесообразно рассказать о проблемах безопасности, в т. ч. информационной, а также проблемах защиты окружающей среды.
В 6 классе учащиеся осваивают трудовые действия, являющиеся простейшими элементами, из которых складываются технологии. Освоение этих действий также осуществляется «в параллель» для всех перечисленных выше материалов. Особого внимания заслуживают универсальные трудовые действия, связанные с измерениями и действиями с именованными числами. Они одинаково важны как для предмета «Технология», так и математики и предметов естественно — научного цикла.
Ключевым моментом является освоение действий по сборке отдельных блоков робототехнического конструктора. Важность развития именно этих действий заключается в том, что современные технологии (например, нанотехнологии, в отличие от традиционных технологий, это технологии «сборки» материала с заданными свойствами из атомов, молекул и наночастиц).
В 7 классе школьники учатся применять общую схему технологии в решении конкретных задач. Сам же процесс решения таких задач максимально «технологизирован» выделен полный цикл решения: постановка задачи, построение модели задачи, определение в рамках данной модели исходных данных (условий) и конечного результата, проектирование и реализация технологии, включая конструирование технологических операций из набора трудовых действий, оценка и использование полученного результата. Основным видам деятельности на этом этапе становится конструирование технологических операций из набора трудовых действий.
Как и в 6-ом классе, ключевую роль отводится робототехническому конструктору. Однако в идейном плане речь идет уже о решении практико-ориентированных задач с использованием простейших конвергентных технологий.
В 8 классе основным методическим инструментом становится проектная деятельность с использованием, прежде всего, робототехнического конструктора. Она направлена на освоение «верхнего этажа» структуры технологии: разработки этапов, направленных на достижение поставленной цели. Параллельно осуществляется обзор современных наукоемких технологий – нанотехнологий, биотехнологий и др., дается представление о конвергентных технологиях, обрисовывается связь современного научного знания и технологического прогресса; демонстрация реализации технологической культуры (прежде всего, владение технологической схемой) при решении самых разнообразных задач. Одновременно раскрываются особенности современной технократической и информационной цивилизации, место человека в этой цивилизации.
Кроме этого обучение курса технологии во всех классах предполагает широкое использование межпредметных связей. Это связи с алгеброй и геометрией при проведении расчётных операций и графических построений; с химией при изучении свойств конструкционных и текстильных материалов, пищевых продуктов; с физикой при изучении механических характеристик материалов, устройства и принципов работы машин, механизмов приборов, видов современных технологий; с историей и искусством при изучении технологий художественно-прикладной обработки материалов.
Источник: nsportal.ru
Роботизация швейного производства
Цель – замена ручных операций автоматизированными.
В легкой промышленности роботы используются ограниченно, так как сложны и недостаточно точны. С 1980 г. появились в Германии, Японии, Италии и США. Лидер – Швеция.
Проблема внедрения:
1 – повышение требований к персоналу;
2 – необходимость изменения психологии людей;
3 – необходимость изменений в подготовке производства.
Преимущества:
1 – значительное сокращение доли ручного труда;
2 – большой экономический эффект от внедрения;
3 – сокращение численности рабочих и рост производительности труда;
4 – сокращение потерь при перестройке потока с одной модели на другую;
5 – неутомляемы и не подвержены эмоциям;
6 – переход к качественно новому типу производства – автоматизированному.
Робот – это автоматическая стационарная или перемещающаяся машина, состоящая из исполнительного механизма (манипулятора), имеющего несколько степеней подвижности, перепрограммируемого устройства управления для выполнения движущих и управляющих функций.
Промышленный робот состоит из нескольких частей:
1 – исполнительный механизм (манипулятор) – руки робота: захваты (отделения от пачки деталей, перенос в рабочую зону и т.д.);
2 – устройство автоматического управления (мозг робота) – служит для выработки управляющих сигналов и выдачи их на привод манипулятора. Базируются на микро ЭВМ с большим объемом памяти (и маленькими габаритами).
Работает в двух режимах:
3 – информационно-измерительная система (орган чувств): сенсорные системы, оснащенные чувствительными датчиками.
Все роботы по специализации делятся на:
– универсальные – для различных видов оборудования (подготовительные операции: ШБМ – 150, СПРУТ – 1 – для погрузки, разгрузки ткани, кроя, изделий;
– специализированные – для одной или нескольких единиц оборудования (для вышивки);
– специальные – для одной установленной технологической операции на единице оборудования (раскройный автомат), автоматический антропометр.
по назначению:
– операционны е – обслуживающие технологическую операцию, например, антропометрический обмер фигуры. Робот Атлант 1,5 мин. – 3000 измерений.
– обслуживающие – для вспомогательно-переместительных приемов.
Например, обслуживающий робот СПРУТ – 1 – для внутрицехового транспортирования полуфабрикатов в контейнерах. Это подвесной робот с верхней трассой транспортирования модульной конструкции, с одной рукой, оснащен механическим схватом.
по виду управления:
– с программным управлением (цикловые — периодического действия, позиционные – работа по конкретным координатам, контурные – задается вся поверхность);
– с адаптивным управлением – зависит от информации о внешней среде и оборудовании + обучаемые.
по грузоподъемности:
1 – сверхлегкие, до 1 кг;
2 – легкие, до 10 кг; в швейной промышленности
3 – средние, 10-200 кг;
4 – тяжелые, 200 – 1000 кг;
5 – сверхтяжелые – более 1000 кг.
по числу степеней свободы:
1 – с двумя степенями (в одной плоскости);
2 – с тремя степенями;
3 – с четырьмя степенями;
4 – более четырех (обычный человек – 49 степеней, акробат – 53 степени)
по признаку перемещения:
по способу установки:
3 – встроенные в конструкцию оборудования
по виду привода:
2 – гидравлический (большее усилие, грузоподъемность);
3 – пневматический (более быстродействующие, просты в управлении);
Расчет количества операционных роботов ведется по производительности.
Например, робот RB – 110 используется для отделения от пачки и подачи накладных карманов джинсов под транспортирующую ленту полуавтомата при обработке верхнего среза кармана. Производительность 1200 карманов в час.
Обслуживающие роботы рассчитываются также как и подъемно- транспортное оборудование, т.е. по затрате времени на отдельные приемы на захват, подъем, перенос, опускание и расщепление захватов:
где n – количество контейнеров,ед.
Экономический эффект от внедрения роботов подсчитывается от экономии заработной платы двух-трех рабочих (исключение монотонных утомительных операций), и экономии на отчисления в фонд социального потребления (обучение, отдых, воспитание детей, здравоохранение и др).
В швейной промышленности робототехнический комплекс состоит из робота, швейного полуавтомата и укладчика. Например, BAS – 300 (Brother) – изготовление манжет сорочки и воротника.
Источник: mydocx.ru
Компьютер из ткани: струйная логика в одежде

В последнее время участились попытки превратить повседневные предметы в их умные эквиваленты. У нас уже есть умные пылесосы, умные холодильники, умные часы и даже умный текстиль. Внедрение электроники в элементы гардероба позволяет создавать одежду, способную считывать биоданные человека, помогать людям с ограниченными возможностями и даже собирать энергию.
Любая такая разработка нуждается в электронных компонентах, которые будут выполнять определенную логическую функцию. А что если заменить их на полностью текстильные? Именно это и сделали ученые из университета Райса (Хьюстон, США). Они внедрили струйную логику в текстиль, создав умную одежду.
Что такое струйная логика, как именно она была внедрена в текстиль, и на что способна полученная в результате одежда? Ответы на эти вопросы мы найдем в докладе ученых. Поехали.
Основа исследования
Текстиль является неотъемлемой частью нашей цивилизации уже на протяжении тысяч лет. А с появлением носимой электроники и робототехники текстиль, используемый в производстве одежды, стал одним из самых перспективных вариантов для создания мягких приводов, предназначенных для работы в качестве роботизированных «мышц». Такие устройства помогают людям выполнять вполне обыденные действия (встать, взять предмет, поднять руку). Но это не вопрос лени, а вопрос физических возможностей, которые у некоторых людей ограничены ввиду травмы, врожденного или приобретенного дефекта.
Большинство таких актуаторов (приводов) на основе текстиля приводятся в действие с помощью тросов или сухожилий с механическим приводом, с помощью мешочков, надуваемых жидкостью под давлением, или путем внедрения в ткань нитей, меняющих форму, которые реагируют на тепловые, электрические, оптические или химические раздражители. В то же время достижения в области материалов и методов изготовления позволили создать ряд носимых текстильных датчиков, которые могут определять силу, давление, деформацию, температуру и влажность.
Но, несмотря на такой прогресс, большинство важных компонентов таких устройств продолжают изготавливать не из текстиля, а других материалов. А системы контроля и управления этих актуаторов до сих пор зависят от жестких и громоздких компонентов, таких как печатные платы (PCB от printed circuit board) и массивы электромеханических клапанов. Альтернативные методы основаны на использовании внешних устройств, но это сильно ограничивает мобильность пользователя.
Решением всех этих проблем может быть струйная логика — технология построения логических схем на основе явлений гидравлики или пневматики. Загвоздка в том, что существующие мягкие клапаны основаны на изначально трехмерной архитектуре и не могут быть перенесены на гибкие двумерные листы, что исключает их реализацию с использованием текстиля. Кроме того, эластомерная конструкция этих клапанов не позволяет их бесшовную интеграцию с одеждой.
В рассматриваемом нами сегодня труде ученые решили восполнить этот пробел, создав систему, где цифровая струйная логика встраивается в полностью текстильную основу. Для этого был разработан текстильный компьютер, который принимает пользовательский ввод, сохраняет данные в памяти и приводит в действие пневматические вспомогательные устройства на основе встроенной булевой логики*.
Булева логика* — это форма алгебры, основанная на трех простых словах, известных как логические операторы: «OR», «AND» и «NOT». В основе булевой логики лежит идея о том, что все значения либо истинны, либо ложны.
Созданные текстильные логические модули гибкие и легкие, их можно интегрировать в обычную одежду, они выдерживают десятки тысяч циклов, устойчивы к стирке и небрежному обращению, а также могут последовательно объединяться в цепь для реализации широкого спектра логических функций.
Результаты исследования
Создание текстильного логического элемента

Изображение №1
Комбинируя элементарные логические блоки, которые на базовом уровне являются тканевыми инверторами или «NOT» вентилями, были построены схемы струйной логики. Каждый инвертор, в свою очередь, состоит из пневматического переключателя или реле, соединенного с выходным резистором. Эта архитектура напоминает электронные инверторы семейства p-канальной логики металл-оксид-полупроводник (или PMOS от p-channel metal-oxide-semiconductor).
Инвертор (1B и 1C; видео №1) имеет три пневматических соединения, а именно: порт питания (или впускной), входной порт и выходной порт. Впускной порт получает сжатый воздух при постоянном давлении (PS) в 50 кПа. Поскольку текстильная логическая платформа использует пневматические сигналы, логические уровни определяются на основе давления воздуха. Высокий логический уровень (или двоичная 1) определяется как давление P в диапазоне 0.8 ≤ P/PS ≤ 1, а логический низкий уровень (или двоичный 0) — как давление близкое к атмосферному в диапазоне 0 ≤ P/PS ≤ 0.1.
Демонстрация текстильного инвертора.
Устройства были изготовлены путем термосваривания слоев нейлоновой тафты, покрытой с одной стороны слоем термопластичного полиуретана, который делает ткань непроницаемой и обеспечивает прочную и газонепроницаемую межслойную адгезию.
Ключевым компонентом текстильного инвертора является пневматическое реле (то есть нормально открытый гидравлический клапан), которое изолирует порт подачи от выхода, когда входной порт находится под давлением. Традиционно мягкие клапаны в струйной логике используют одну из двух общих парадигм проектирования, которые ученые называют «пережимной» и «перегибной» конструкциями клапанов.
Пережимные клапаны напрямую используют давление жидкости в линии управления, чтобы деформировать гибкую стенку прилегающего мягкого канала и тем самым ограничить поток в выходной линии. Несмотря на простоту конструкции, эти клапаны обычно влекут за собой перепад давления жидкости между сигналами управления и выходными сигналами, что ограничивает возможность последовательного включения вентилей.
С другой стороны, перегибные клапаны прилагают осевые или поперечные силы, вызывая искривление мягкого канала, создавая перегиб, который перекрывает поток. Этот механизм, основанный на упругой нестабильности, допускает переключение выходного давления, превышающего давление входного сигнала, и обеспечивает резкий и гистерезисный переход клапана.
В результате была создана весьма надежная конструкция клапана, где основной канал потока (который проходит от подачи к выходному порту) размещен между парой надувных мешков, которые соединяются с входным портом (1B); мешочки связаны пневматическими отверстиями, прорезанными в среднем слое, несущем каналы, и они надуваются (или сдуваются) в тандеме, когда вход (давление) становится высоким (или низким).
Верхний и нижний мешочки смещены параллельно каналу и перекрываются на расстояние sL, где L — ширина каждого мешочка. При надувании они создают изгибающий крутящий момент вдоль линий B и C, который складывает средний слой в Z-образную форму, образуя два перегиба в каждой части канала потока (1D).
Максимальный угол изгиба (ϕ) в четырех точках перегиба может быть получен геометрически и определяется выражением sinϕ = x, где x > 0 является решением трансцендентного уравнения:


Изображение №2
Теоретический угол, предсказанный уравнением выше, прекрасно согласуется с экспериментально наблюдаемыми углами перегиба в тестируемых текстильных устройствах (изображение №2).
Перекрытие 50 % (s = 0.5) давало надежный перегиб с углом сгиба ϕ = 49° (2А и 2С), что было достаточным для предотвращения прохождения воздуха через канал при давлениях до 100 кПа. Потому было решено разработать все текстильные клапаны со смещением мешочков до 50% перекрытия.
На 1Е показана пневматическая схема текстильного инвертора, содержащая нормально разомкнутое гидравлическое реле (перегибной клапан), соединенное с выходным подтягивающим резистором. А на 1G показан инвертор, функционирующий как струйный вентиль «NOT». С портом включения, установленным на высокий уровень, входной сигнал низкого давления дает выходной сигнал высокого давления, и наоборот. На 1H выходное давление инвертора прослеживается по мере увеличения входного давления от нуля до PS, а затем обратно до нуля.
Реализация модульной логики и памяти на основе текстиля

Изображение №3
Создав функциональный инвертор на основе текстиля, ученые затем собрали цифровые логические схемы, объединив несколько инверторов в последовательную и параллельную конфигурации. Например, на 3А показан двоичный вентиль NAND (т. е. NOT-AND), построенный с использованием двух текстильных инверторов.
В этой модульной конфигурации инверторы монтируются с помощью застежек-липучек, что позволяет легко снимать и перемещать их, а соединения между ними «соединяются» с помощью гибких полиуретановых трубок.
Один и тот же набор инверторов можно перемонтировать несколькими способами для реализации различных логических функций. В качестве иллюстрации был построен унарный логический буфер и двоичный вентиль NOR(т. е. NOT-OR), реконфигурировав ту же пару инверторов, что и на 3A. Затем были построены двоичные логические элементы «AND» и «OR» за счет добавления третьего инверторного модуля.
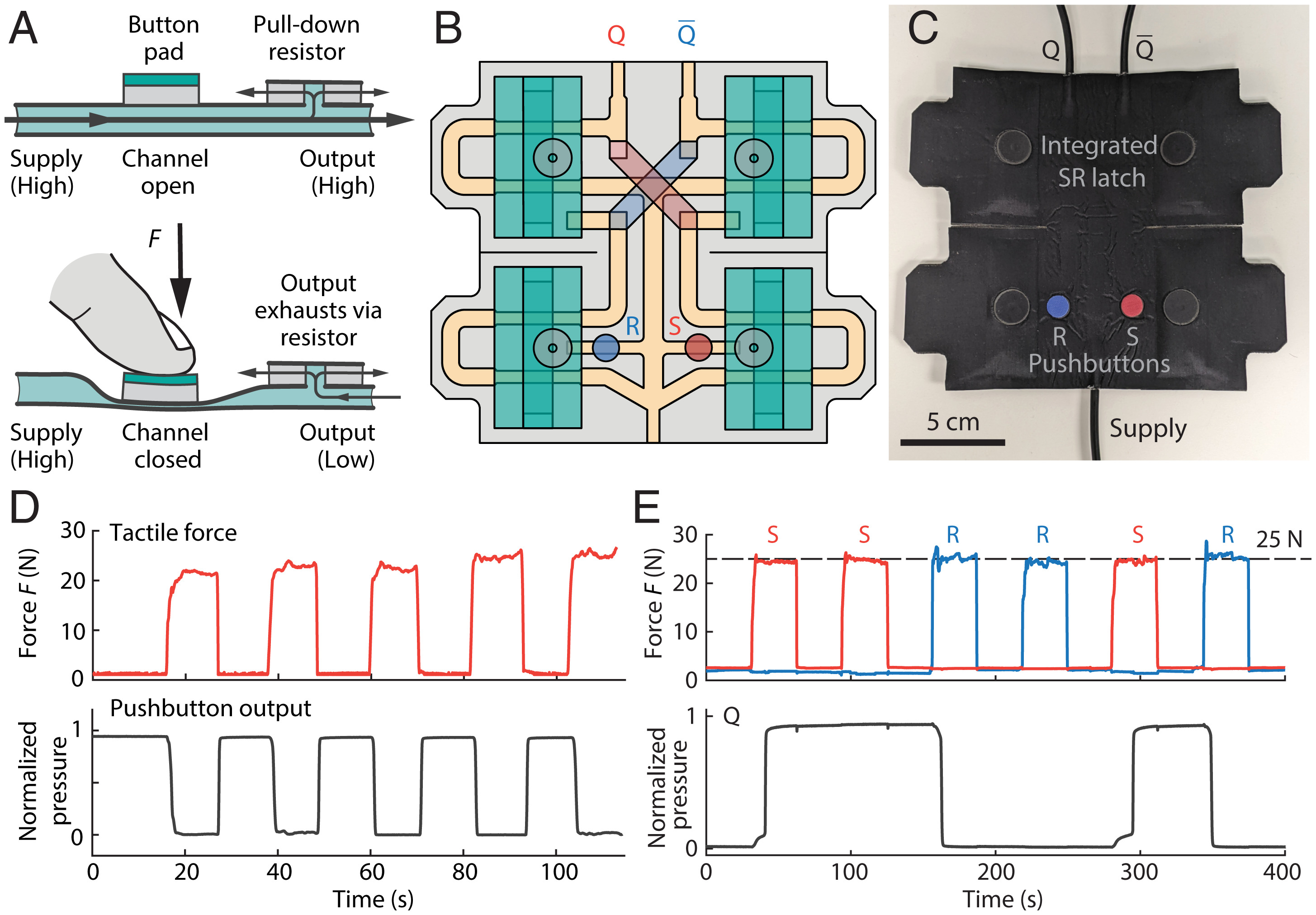
В дополнение к комбинационным логическим схемам, описанным выше, были также использованы текстильные логические модули для реализации асинхронной последовательной логики, управляемой вводом. В частности, была построена пневматическая защелка SR (set-reset) из пары инверторов с перекрестной связью (3B).
Защелка имеет два входа с активным высоким уровнем, S и R, которые приводят к высокому или низкому уровню выхода Q соответственно. Когда оба входа неактивны (низкий уровень), состояние выхода сохраняется. Таким образом, одна защелка SR вносит один бит энергозависимой памяти на текстильной основе, способной хранить внутреннее состояние системы.
Во время демонстрации одного из вариантов носимого устройств данная память использовалась для хранения текущего состояния (накачанного или спущенного) вспомогательного пневматического привода (для капюшона) и для переключения его состояния в ответ на действия пользователя.
Реализация взаимодействия с пользователем
Изображение №4
Чтобы текстильные контроллеры могли принимать вводимые пользователем данные, были созданы пневматические кнопочные клапаны (напоминающие электронные переключатели мгновенного действия) путем приклеивания к контроллеру цветных круглых пенопластовых прокладок по входным каналам ткани (4А).
Когда вход клапана подключен к линии подачи воздуха, канал остается открытым благодаря внутреннему давлению газа, и выход клапана обычно высок. Пользователь отправляет сигнал активного низкого уровня на контроллер, нажимая на подушечку пальцем, сужая поток воздуха через канал ниже. А пенорезистор, расположенный после клапана, снижает выходной сигнал. Ослабление давления на подушечку снова открывает канал, а узел кнопки и резистора, таким образом, ведет себя как нормально разомкнутый гидравлический переключатель мгновенного действия (4D).
Чтобы обеспечить управляемую вводом активацию механизма, были использованы пара кнопочных клапанов с цветовой кодировкой для управления входами S и R защелки, используя промежуточный слой инверторов для преобразования выходного сигнала каждой кнопки из активного низкого уровня в активный-высокий (4B).
Таким образом, текстильная система управления объединяет две кнопки, четыре пневматических перегибных клапана и четыре подтягивающих резистора в компактный форм-фактор для легкой интеграции в одежду (4C). Кроме того, внешние трубки между компонентами заменены внутренними каналами, которые проходят между слоями текстиля.
Практическое применение системы
Наконец, чтобы продемонстрировать возможности текстильной логической платформы, ученые создали носимых вспомогательных роботов, интегрировав приведенный выше логический контроллер с двумя пневматическими приводами, а именно: подъемник руки и подъемник капюшона.
И поднятие руки, и одевание/снимание капюшона требуют от человека подъема руки до уровня плеча или выше. Для некоторых людей эта задача либо крайне сложна, либо вовсе невыполнима ввиду нарушений роботы опорно-двигательного аппарата.

Изображение №5
Привод подъема руки состоит из шести надувных мешочков, надежно прикрепленных к одежде пользователя под плечевым суставом. Под давлением мешочки воздействуют на плечо, создавая подъемный момент, который помогает пользователю поднять руку.
Для подъемника воротника были сделаны несколько надувных текстильных воротников. При срабатывании текстильные сильфоны, прикрепленные к петлям воротника, натягивают капюшон на голову пользователя. После этого пара эластичных текстильных «пружин» убирает капюшон в открытое положение, когда давление в приводах сбрасывается.
Чтобы управлять этими приводами в ответ на команды пользователя, их пневматические входы были соединены с Q-выходом текстильного контроллера через промежуточный текстильный инвертор (работающий как вентиль «NOT»). Инвертор пневматически изолирует логическую схему от большой струйной емкости привода, позволяя защелке работать с нормальной скоростью (5А).
Демонстрация работы текстильных вспомогательных приводов.
В заключение своего исследования ученые проверили свои изделия на прочность, проведя тест, имитирующий старение, усталость материала и грубое обращение, ожидаемые при длительной эксплуатации (изображение №6 и видео №4).

Изображение №6
Тест на износ.
Инвертор оставался работоспособным после 20000 циклов срабатывания (6А) при предполагаемом рабочем давлении 50 кПа. При давлении в 100 кПА он выдержал 10000 циклов.
Тест на изгиб (повторяемое складывание; 6B) также не показал никаких деформаций или ухудшения характеристик устройства даже после 1 миллиона циклов (6C). Инвертор оставался работоспособным после 20 циклов машинной стирки (6D). Затем ученые переехали устройство пикапом 5 раз, но и этот грубый тест инвертор выдержал (6E и 6F).
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы (+ тут) к нему.
Эпилог
В рассмотренном нами сегодня труде ученые продемонстрировали практическую основу для внедрения струйной логики в двумерный текстильные структуры.
Созданная текстильная логическая платформа поддерживает комбинационные и последовательные логические функции, встроенную память, взаимодействие с пользователем и прямое взаимодействие с пневматическими приводами, сохраняя при этом многие неотъемлемые преимущества текстиля, такие как: комфорт, долговечность, совместимость, низкая стоимость и масштабируемость производства.
Используя свои наработки, ученые создали два простых, но крайне полезных устройства. Одно позволяло человеку поднять руку, а другое могло при нажатии кнопки одеть или снять капюшон с головы человека. Эти действия кажутся весьма простыми, но только если у вас нет никаких проблем с опорно-двигательным аппаратом. В противном случае любые движения, которые превышают ваш диапазон возможностей, становятся практически невыполнимыми.
Именно в этом и заключается основная суть данного исследования — попытка создать удобные и недорогие устройства, которые смогут расширить возможности людей, у которых они ограничены ввиду травм или врожденных дефектов. Если данный труд приведет к созданию хотя бы одного устройства, облегчающего жизнь хотя бы одного человека, это уже будет знаком того, что оно было не зря.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?
- аугментация
- опорно-двигательный аппарат
- здоровье
- робототехника
- текстиль
- актуатор
- вентиль
- струйная логика
- логические схемы
- логические элементы
- Блог компании ua-hosting.company
- Разработка робототехники
- Научно-популярное
- Носимая электроника
- Здоровье
Источник: habr.com