
Universal Mechanism Lite — набор инструментов для создания динамического объекта — системы тел — и последующего анализа его динамических, кинематических и статических свойств.
Бесплатная лицензия для вузов и частных лиц.
Universal Mechanism Lite представляет собой упрощенный вариант основной программы и рассчитан на широкий круг пользователей: студентов, аспирантов и преподавателей ВУЗов, инженеров-конструкторов, а также просто любителей механики. Программа предназначена для моделирования динамики и кинематики плоских и пространственных механических систем.
Схема работы программы такова. Сначала исследователь описывает механическую систему как систему тел, соединенных шарнирами и силовыми элементами. Далее программа автоматически строит уравнения движения системы и численно их решает либо во временной либо в частотной области.
В процессе численного решения поддерживается непосредственная анимация движения модели. В процессе расчета для анализа доступны практически все необходимые величины: координаты, скорости, ускорения, силы реакций в шарнирах, усилия в пружинах и т.д.
Рост на 116 % за 3 месяца — Blue Horseshoe Heavy — Пассивный доход — ПАММ на Lirunex
- Упростить процесс создания динамических моделей и их численного анализа, сделав доступным моделирование динамики систем тел широкому кругу инженеров-исследователей и конструкторов.
- Максимально снизить стоимость разработки, что позволит превратить ее в массовый программный продукт.
- Подготовить массового пользователя к использованию более сложных и функционально полных программ, в том числе программы UM.
UM — Универсальный механизм — моделирование динамики и кинематики плоских и пространственных механических систем
Программный комплекс «Универсальный механизм» состоит из препроцессора и постпроцессора, кои умеют поставляться в разных конфигурациях. Наименьшая «базовая» конфигурация UM Base является законченным программным продуктом и дает возможностьпроводить динамический разбор механических систем.
Механизмы описываются как системы твердых тел, шарниров и силовых элементов. Поддерживается непосредственная анимация перемещения вашей модели в ходе расчета. Для анализа доступны почти все нужные величины: координаты, ускорения, скорости, силы реакций в шарнирах, усилия в пружинах и т.д. UM включает ядро и несколькодополнительных модулей, расширяющих функциональность ядра: автомобильный модуль, железнодорожный модуль, модуль импорта из CAD программ, модуль моделирования упругих тел, модуль оптимизации, модуль связи с Matlab/Simulink и иные.
Краткая характеристика
Тела
Тела произвольной формы
Автоматический расчет инерционных параметров и положения центра масс
Шарниры и связи
Вращательный, поступательный, цилиндрический, Кардано, обобщенный, кватернионный шарниры
Связь в виде невесомого стержня
Силы
Общие, контактные, биполярные, особые и иные описанные пользователем силы
Графические элементы
Полиэдр, эллипс, параллелепипед, винтовая линия эллипсоид, конус, параметрический, профильный
Топ 5 скрытых полезных программ Windows 10
Ввоз ASC и 3DS файлов, КОМПАС, SOLIDWORKS, Autodesk Inventor
Измеряемые величины
Линейные и угловые координаты, скорости, ускорения
Активные силы и моменты
Силы реакции
Иные величины, определенные пользователем
Управление моделированием
Запуск, пауза, продолжение, остановка моделирования в любое время
Контроль четкости решения
Программирование модулей пользователя
Помощь наработки модулей пользователя с использованием компиляторов:
MS Visual C++ 5.0-6.0;
Borland C++ Builder 5.0;
Borland Delphi 4.0-2006
Визуализация
Анимация объектов
Траектории точек
Угловые и линейные скорости и ускорения в виде векторов
Все измеряемые величины в виде графиков
Ввоз
3DS файлы
ASC файлы
Части и сборки (графические образы, инерционные характеристики тел, сопряжения) из КОМПАС, SOLIDWORKS, Autodesk Inventor, Unigraphics NX
Модели из Matlab/Simulink
Вывоз
BMP файлы
AVI файлы
Анимированные GIF файлы
Измеряемые величины в форматированный текстовый файл
Таблицы и графики в MS Word и Excel
Универсальный механизм: комплектация и модули
- UM Base: ядро программы, требуется для всех дополнительных модулей; дает возможность проводить динамический разбор механических систем; является закончен-ным программным продуктом и не нуждается в установке дополнительного ПО. Функциональность ядра расширяется дополнительными модулями.
- UM Automotive: модуль для моделирования динамики автомобилей, объединяющий в себе среду для описания и проведения разных маневров, программные инструменты, библиотеку неровностей, подвесок и элементов трансмиссии, модели шин и водителя.
- UM Caterpillar: модуль для моделирования динамики гусеничного транспорта.
- UM Loco: модуль для моделирования рельсовых экипажей; дает возможность наблюдать динамику ж/д транспорта в полной пространственной постановке, в прямых и кривых участках пути, с учетом и без учета неровностей путевой структуры с одновременным расчетом переменных, характеризующих динамические параметры: ускорения произвольных точек любого тела, коэффициенты динамики, усилия в тягах и поводках, рамные силы, силы в контакте колесо — рельс, факторы износа, коэффициенты безопасности и так дальше.
- UM Optimization: модуль для параметрического сканирования и оптимизации.
- UM Cluster: служба распределенных вычислений; расширяет функциональность модуля оптимизации; дает возможность проводить параллельные расчеты на массу компьютерах с обменом этими по локальной или сети.
- UM FEM: модуль для описания моделей, включающих как совсем твердые, так и упругие тела; поддерживается ввоз данных естественно-элементных моделей из ANSYS и NASTRAN.
- UM Durability: модуль для прогнозирования усталостной долговечности элементовустройства.
- UM Control: интерфейс с Matlab/Simulink; дает возможность интегрировать схемы, созданные в Matlab/Simulink в модели механических систем UM.
- UM CAD Interfaces: ввоз графики и инерционных параметров твердых тел из программ КОМПАС-3d, SOLIDWORKS, Autodesk Inventor, Unigraphics, Pro/E. После импорта таких изCAD программы в «Универсальном механизме» создаются соответствующие графические образы, твердые тела с их инерционными параметрами и шарниры, соответствующими сопряжениям, описанным в CAD программе.
- UM Train: модуль для расчета продольной динамики поезда.
Программа имеет интерфейс и руководство пользователя на русском и английском языках.
Сайт программы: www.universalmechanism.com
Оставьте свой комментарий!
Источник: pro-spo.ru
Универсальный механизм
Программный комплекс «Универсальный механизм» (UM) предназначен для моделирования динамики и кинематики плоских и пространственных механических систем.
Программа ориентирована на инженеров-практиков, студентов и преподавателей вузов, всех, кто сталкивается с проблемами исследования динамического поведения машин и механизмов.
Механизмы описываются как системы твердых тел, шарниров и силовых элементов.
Поддерживается непосредственная анимация движения вашей модели в процессе расчета. Для анализа доступны практически все необходимые величины: координаты, скорости, ускорения, силы реакций в шарнирах, усилия в пружинах и т.д.
Развитый постпроцессор: линейный анализ, статистический анализ, многовариантные расчеты и оптимизация, экспорт результатов. Это эффективный инструмент для моделирования динамики различных машин и механизмов: космических конструкций, роботов и манипуляторов, железнодорожных экипажей, автомобилей, кабелей и т.д. Решение прямой и обратной задач кинематики и динамики.
UM включает в себя ядро и ряд дополнительных модулей, расширяющих функциональность ядра: автомобильный модуль, железнодорожный модуль, модуль импорта из CAD программ, модуль моделирования упругих тел, модуль многовариантных расчетов и оптимизации, модуль связи с Matlab/Simulink и другие.
Источник: ascon.ru
Программа моделирования движения um Simulation
Программный пакет UM Simulation предназначен для моделирования движения построенной системы и анализа ее динамики. При переходе к модулю UM Simulation исследуемая модель должна автоматически открыться в анимационном окне. Если этого не произошло, необходимо выбрать пункт меню Инструменты/Анимационное окно.
После этого появится новое анимационное окно с изображением загруженной модели. Можно осуществлять поворот полученного изображения с помощью кнопки 
 . Приближение/удаление объекта выполняется кнопкой
. Приближение/удаление объекта выполняется кнопкой  . На рис.
. На рис.
1.16 представлен внешний вид анимационного окна. 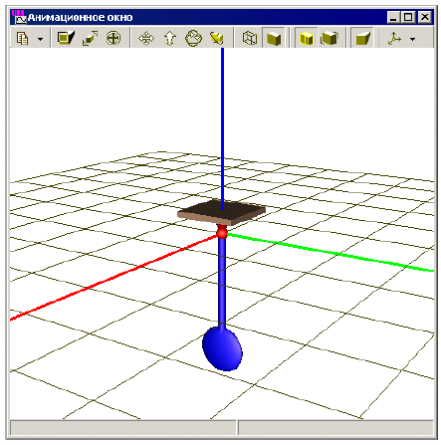 Рис. 1.16. Анимационное окно
Рис. 1.16. Анимационное окно
Переход в режим моделирования
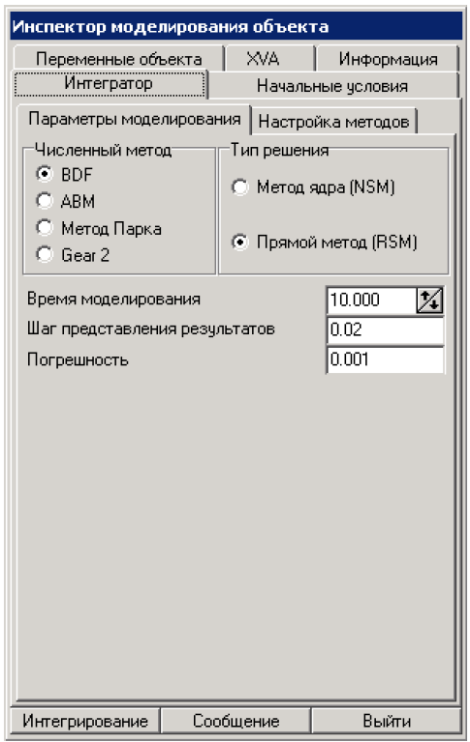
Для осуществления этого перехода нужно выбрать пункт меню Анализ/Моделирование. После этого появится окно инспектора моделирования объекта, рис.
1.17. Рис. 1.17. Окно инспектора моделирования
Задание начальных условий
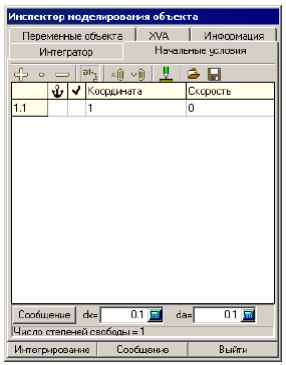
Для задания начальных условий движения системы необходимо перейти на закладку Начальные условия Инспектора моделирования объекта. Появится список всех координат системы. В полях Координата и Скорость нужно указать значения начальных условий и нажать клавишу Enter, рис. 1.18. Рис.
1.18. Задание начальных условий
Моделирование движения
- Численный метод
- Тип решения
- Время моделирования
Построение графиков
В процессе моделирования можно строить графики различных величин. Для этого следует:
- Создать новое графическое окно, выбрав пункт меню Инструменты/Графическое окно
- Открыть окно Мастера переменных, выбрав пункт меню Инструменты/Мастер переменных
Мастер переменных – специальный инструмент для создания переменных, которые затем можно построить в графическом окне и отображать в анимационном окне (если это вектор).
- Перейти на одну из закладок мастера, например Линейные перемещения
- Выбрать необходимую Компоненту
- Переместить описанную переменную в контейнер, нажав кнопку

- Выделить эту переменную и мышкой перетащить ее в графическое окно
- Перейти к Инспектору моделирования и нажать кнопку Интегрирование
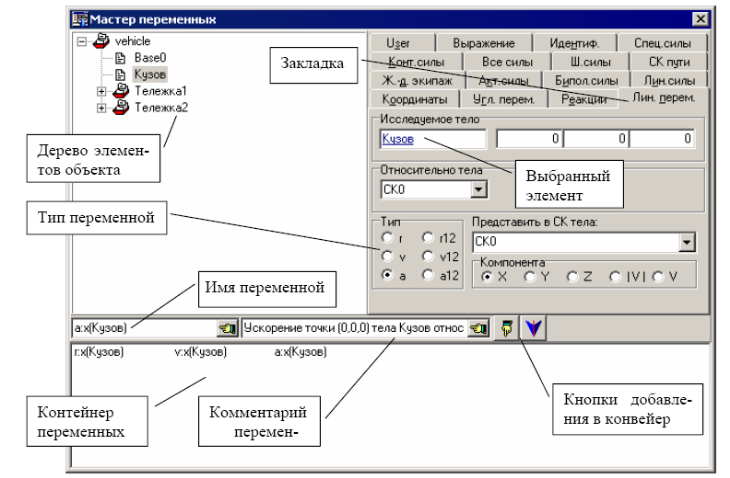 Рис. 1.19. Мастер переменных
Рис. 1.19. Мастер переменных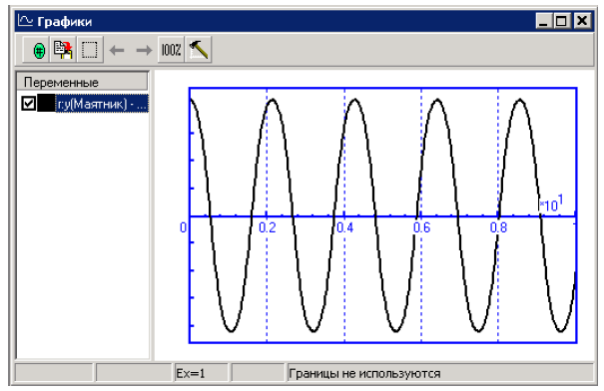 Рис. 1.20. Графическое окно
Рис. 1.20. Графическое окно
Построение векторов и траекторий
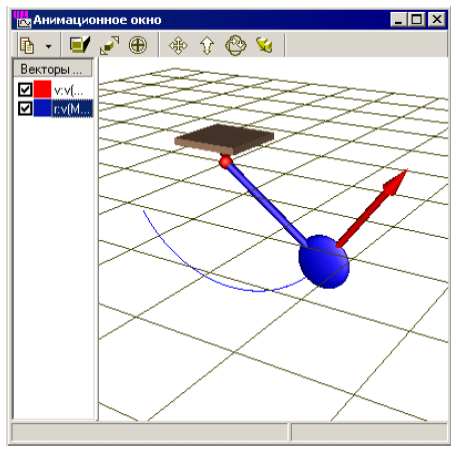
В процессе моделирования можно строить векторы различных величин и траектории движения в анимационном окне. Для этого необходимо:
- Создать в Мастере переменных переменную этого вектора
- Перетащить мышкой созданную переменную в анимационное окно
- Запустить процесс интегрирования
Рис. 1.21. Визуализация вектора в анимационном окне
Источник: studfile.net