
1 ФГБОУ ВПО «Владимирский государственный университет имени Александра Григорьевича и Николая Григорьевича Столетовых»
Статья посвящена обзору и анализу средств имитационного моделирования, таких как языки программирования высокого уровня и системы имитационного моделирования. Приведен анализ языков программирования высокого уровня, их развитие. Дана их классификация, функции и направления. Приведены подходы к описанию динамики системы.
Проанализированы основные требования, которым должны удовлетворять языки моделирования гибких производственных и робототехнических систем. Требованиями являются: простота описания реального времени, наличие развитых средств передачи управления, наличие средств статистической обработки получаемой информации, удобство для создания проблемно-ориентированной надстройки языка. Приведен метод оценки альтернативных вариантов гибких производственных сетей. Исследована имитационная модель функционирования транспортных систем участков станков с числовым программным управлением. Указана последовательность построения имитационной модели, выбор цели и задачи, методов и инструментов.
О программе AnyLogic.

робототехнические системы
гибкие производственные системы
имитационное моделирование
1. Акулович Л.М., Шелег В.К. Основы автоматизированного проектирования технологических процессов в машиностроении. – М. : Новое знание, Инфра-М, 2012. – 280 с.
2. Брюханов В.Н., Голосов С.В. Проектирование транспортной системы ГПС с использованием имитационного моделирования. Системное проектирование ГАП. – Владимир, 1985. – 30 с.
3. Дальский А.М. Технологическая наследственность в машиностроительном производстве. – МАИ, 2000. – 360 с.
4. Сизый Ю.А. Основы научных исследований в технологии машиностроения. – Харьков : УкрГНТЦ Энергосталь, 2007. – 300 с.
5. Тимирязев В.А. Основы технологии машиностроительного производства. – М. : Лань, 2012. – 348 с.
Введение. Имитационное моделирование – это метод исследования, при котором изучаемая система заменяется моделью, с достаточной точностью описывающей реальную систему, и с ней проводятся эксперименты с целью получения информации об этой системе.
Быстрое развитие информационных технологий и ее роль в управлении процессами сделали область информационных технологий катализатором управленческого прогресса. В России предпринимаются методы, направленные на развитие и превращение страны в современное высокотехнологичное государство. Мировая практика принятия сложных управленческих решений в различных системах перешла на новый уровень, когда те или иные варианты возможных решений должны быть предварительно опробованы на моделях. В связи с этим принимаемые решения или инновации требуют предварительных оценок возможных результатов при помощи системного анализа и имитационного моделирования. Этим и объясняется актуальность данного исследования.
В качестве средств имитационного моделирования могут служить:
Введение в имитационное моделирование. Разработка имитационных моделей | Тимур Девятков | Лекториум
1) языки программирования высокого уровня [1; 2];
2) системы имитационного моделирования (GPSS, SIMULA, SIMSCRIPT, специализированные ППП) [1].
Языки программирования высокого уровня (ЯПВУ) – FORTRAN, ALGOL, PL-1, PASCAL, BASIC почти не имеют ограничений при использовании для задач моделирования. Так что они могут применяться неограниченно, независимо от свойств и структуры системы (дискретная/непрерывная). Но они не содержат никакой языковой поддержки для решения задач моделирования. Поэтому их применение для создания имитационных моделей нецелесообразно вследствие больших затрат машинного времени, а также времени разработки самой модели.
Возрастающее значение моделирования привело к разработке различных специальных языков моделирования. Большинство из них развилось из ЯПВУ (таблица 1).
Развитие языков моделирования из ЯПВУ.
С помощью языковых элементов, ориентированных на моделирование. Например, очереди, события и т.д.
С помощью процессора и/или пакетов подпрограмм для реализации специфических функций моделирования
Очень незначительное число языков моделирования возникло независимо от структур ЯПВУ, например NGPSS, SIAS, FLSIM, HOSPSIM.
Так как производственный процесс является дискретным, то ограничимся только рассмотрением дискретных систем имитационного моделирования.
К настоящему времени имеется около 30 языков дискретного моделирования. Большинство из них повторяют в том или ином виде черты наиболее известных и признанных: GPSS, CSL, SOL, SIMULA, SIMSCRIPT [3].
В каждом языке моделирования предусмотрена своя структура управляющей программы, соответствующая содержанию функциональных блоков модели, и в этом заключается принципиальное различие языков при организации динамического имитационного процесса.
Существуют три подхода к описанию динамики системы:
1) поисковый метод выбора очередного события;
2) использование схемы расписания событий;
3) описание системы на языке взаимодействия параллельных процессов.
Под событием понимается мгновенное изменение состояния некоторого объекта системы. С точки зрения динамики система рассматривается как совокупность связанных друг с другом процессов, причем взаимодействие между ними управляется и координируется совершающимися событиями.
Первый метод применяется в языке CSL (а также в языках AS, GSP). Имитационная программа строится таким образом, чтобы каждый ее блок соответствовал некоторой работе: операция загрузки станка, полная обработка детали на станке, выполнение задачи в вычислительной системе, отдельный этап выполнения машинной команды.
Работа описывается программой, состоящей из условия и тела (контрольного и функционального блоков). В контрольном блоке перечислены все условия, при соблюдении которых может быть выполнена программа функционального блока, описывающая необходимые изменения элементов системы.
При этом изменения в данных привязываются к так называемому локальному времени, фиксирующему конец данной работы или, другими словами, момент завершения перехода между состояниями ее элементов. Смена же состояний (событие) в любой динамической модели дискретных событий происходит мгновенно. Управляющая программа последовательно просматривает программы всех работ.
Если некоторая программа может быть выполнена, то управление передается ее функциональному блоку. Если обращение к функциональному блоку не происходит, управляющая программа продолжает последовательно анализировать все работы, не изменяя системного времени. Преимущество применения поискового метода выбора очередного события состоит в компактности описания модели.
Язык CSL применяется для описания систем с большим числом различных ресурсов. Это язык работ (таблица 2).
Классификация языков моделирования.
Второй метод реализован в языке SIMSCRIPT (а также GASP и др.). Это язык событий. Модель строится таким образом, что каждый ее блок соответствует событию. Каждый вид события перечисляется в «списке событий», на основании которого автоматически генерируется главная программа – календарь (управляющая программа). Эта программа следит за ходом системного времени и вызывает различные программы событий [5].
Системное время – время возникновения событий в реальной системе. В каждой программе событий содержатся операторы, определяющие смену состояний элементов модели, и операторы, планирующие другие события в некоторые моменты системного времени, в том числе данное событие. События могут наступать в любой момент времени.
Когда выполнение определенной программы заканчивается, системное время немедленно приравнивается к моменту времени следующего события, наиболее близкого. Таким образом, при использовании схемы расписания событий удается избежать перебора общего списка событий, за счет чего достигается вычислительная эффективность языка. Но каждому виду событий должна соответствовать отдельная программа. Исходная программа моделирующего алгоритма, написанная на языке SIMSCRIPT, сначала переводится на язык FORTRAN, а затем транслируется в конкретный машинный язык ЭВМ (язык SIMSCRIPT разработан в корпорации RAND для машин фирмы IBM).
Третий метод реализован в языках GPSS, SOL, SIMULA. Этот подход является шагом к объединению вычислительной эффективности языка событий и компактности описания модели на языке работ. Каждый блок соответствует процессу. Процесс характеризуется некоторой структурой данных и правилом действий.
Каждый процесс может быть активным на некоторых этапах своего существования в системе и пассивным на других этапах. У процесса может быть несколько точек связи (точек реактиваций) с другими процессами и несколько активных фаз. Динамика системы описывается последовательностью мгновенных событий, причем каждое событие является активной фазой некоторого процесса. Это отличает язык процессов от языков работ и событий.
Некоторая работа или событие может взаимодействовать с другими работами или событиями только после того, как выполнены все относящиеся к ней операции. Программа работы и события начинается с одного и того же выполняемого оператора. Для процесса же существуют точки реактивации, которые определяют те места в программе процесса, с которых надо ее продолжить после выполнения прерывающихся команд типа «задержка», «ждать» и «ждать пока».
Средством формализации динамики системы в этих языках служит элемент потока – транзакт, функциональный цикл которого включает перемещение от одного стационарного блока модели к другому. В языках GPSS и SOL предварительно уже заложено определение таких стационарных устройств, как «средство обслуживания» и «хранилище». В языке SOL, помимо понятия транзакта (процесса), имеется понятие класса процесса.
Очевидно, что для моделирования ГПС и робототехнических систем наиболее удобен подход к описанию динамики системы на языке взаимодействия параллельных процессов. Но необходимо обоснованно выбрать сам язык моделирования для описания системы, так как от него зависит степень выполнения требований, предъявляемых к имитационной модели; адекватно отражать функционирование системы; обладать структурой, подобной моделируемой системе; обеспечивать удобство проведения экспериментов; обладать развитыми средствами сбора, обработки и наглядного представления результатов моделирования.
В качестве основных требований, которым должны удовлетворять языки моделирования ГПС и робототехнических систем, можно указать простоту описания реального времени, наличие развитых средств передачи управления, наличие средств статистической обработки получаемой информации, удобство для создания проблемно- ориентированной надстройки языка.
Имитационное моделирование на стадии проектирования РГПС преследует цели [5]:
- выбор станков и режущего инструмента;
- определение оптимальных условий обработки и стратегии управления станками и промышленными роботами;
- анализ различных вариантов управления перемещением и транспортировкой разрабатываемых деталей;
- синтез конфигурации системы и компоновки РТК, способствующих наиболее эффективной работе ГПС и получению оптимальных характеристик системы.
Для оценки альтернативных вариантов ГПС весь процесс имитационного моделирования можно разделить на два уровня. На первом осуществляется грубая оценка характеристик: различные варианты РТК, скорости обработки, время ожидания деталей и транспортирования. Это моделирование на макроуровне.
Для этого типа информации составляется относительно обобщенная модель, которая действует в соответствии с производственной программой, позволяет выявить основные и характерные особенности исследуемой ГПС.
На микроуровне для определения требований к оборудованию, а именно количества транспортеров, тележек, проблемы узких мест, требуются более детализированные имитационные модели. На выходе у них должна быть информация, необходимая проектировщику для разработки конкретной стратегии управления, для оптимизации характеристик системы. Такая имитационная модель требует гораздо больше времени, а моделирование охватывает всего несколько дней или недель. Поэтому в данном случае, когда это возможно, составляют аналитическую модель.
При моделировании на макроуровне опираются на теорию массового обслуживания, используемую для получения характеристик устойчивого состояния системы. Последние включают в себя среднюю скорость обработки, показатели использования основного и вспомогательного оборудования.
Эта информация обеспечивает проектировщику быструю оценку характеристик системы перед тем, как производить более детальное имитационное моделирование. Если результаты не удовлетворительны, то изменяется проект ГПС. В достаточно короткий срок можно сравнить альтернативные варианты системы. Если проект эффективен, то он далее исследуется с помощью микроуровня. Моделирование на микроуровне позволяет выявить все недостатки, которые не обнаружились при оценке системы на макроуровне [5].
Различают системы имитационного моделирования общего назначения, которые, тем не менее, могут применяться для создания ИМ ГПС и РТС, и специализированные пакеты прикладных программ (ППП).
Наиболее распространенными общецелевыми дискретными системами (языками) имитационного моделирования взаимодействия параллельных процессов являются SIMULA и GPSS .
Применение того или иного специализированного ППП зависит от конкретной задачи моделирования ГПС и РТК. Среди общецелевых систем имитационного моделирования язык GPSS наиболее полно удовлетворяет предъявляемым к языкам моделирования ГПС и РТС требованиям.
Имитационная модель функционирования транспортных систем участков станков с ЧПУ разработана В.Н. Брюхановым [2]. Моделируемая система представлена на рис. 1. Моделирование процесса функционирования участка заключается в имитации прохождения деталей по станкам, транспортной системе, контрольным машинам и другим агрегатам участка в соответствии с маршрутами обработки, запуском деталей на участок и организацией работы транспортной системы.
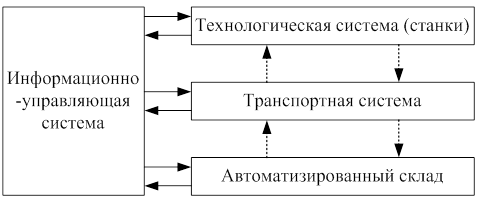
Рис. 1. Имитационная модель В.Н. Брюханова

информационные сигналы;

материальные потоки.
В основу построения модели участка положен универсальный модуль «агрегат», моделирующий работу любого агрегата участка, т.к. последний выполняет одни и те же функции с точки зрения временных затрат: прием детали, временное хранение, обработку, хранение после обработки, передачу другому агрегату. Отличие агрегатов друг от друга заключается только в числовых характеристиках и структурных признаках по передачам. Имитационная модель составлена на языке ФОРТРАН-1У.
Моделирование при проектировании РГПС преследует различные цели: выбор структуры и параметров системы, подсистем и устройств, определение значения параметров, в наибольшей степени влияющих на показатели качества системы; исследование проектируемой системы при различных задающих и возмущающих воздействиях; определение чувствительности системы к отказу тех или иных ее составляющих и т.д. [3].
При имитационном подходе построения моделирующего алгоритма структура его зависит от математической модели, но язык моделирования формально не использует математическую модель ГПС, а оперирует с ее содержательным описанием. Фактически же математическая модель присутствует как бы внутри языка.
Аналитическая модель использует явно математические зависимости, связывающие искомые характеристики с начальными условиями, параметрами и переменными.
Выводы
Систему имитационного моделирования для проектирования РГПС необходимо строить на основе системного подхода.
В качестве основных требований, которым должны удовлетворять языки моделирования РГПС, являются простота описания реального времени, наличие развитых средств передачи управления, наличие средств статистической обработки получаемой информации, удобство для создания проблемно-ориентированной надстройки языка.
В создании систем имитационного моделирования, эксплуатируемых в составе математического обеспечения ГПС, можно условно выделить два направления. Первое связано с использованием какой-либо универсальной системы моделирования с программной надстройкой, имитирующей диалог на профессиональном языке пользователя. Второе направление связано с созданием сравнительно жестких модульных систем имитационного моделирования с высоким уровнем структурного подобия моделируемому объекту.
Рецензенты:
Веселов О.В., д.т.н., профессор кафедры «Мехатроника и электронные системы автомобилей» ФГБОУ ВПО «Владимирский государственный университет имени Александра Григорьевича и Николая Григорьевича Столетовых», г. Владимир.
Сергеев А.Г., д.т.н., профессор кафедры «Управление качеством и техническое регулирование» ФГБОУ ВПО «Владимирский государственный университет имени Александра Григорьевича и Николая Григорьевича Столетовых», г. Владимир.
Источник: science-education.ru
Большая Энциклопедия Нефти и Газа
Основная имитационная программа может включать в себя подпрограмму расчета параметров производительности и параметров экономической эффективности при детерминированных характеристиках оборудования и выбранных параметрах партии обрабатываемых деталей. [1]
Простейшие имитационные программы реализуются непосредственно на отлаживаемых объектах. В этом случае между отлаживаемым программным обеспечением и имитационными программами обратная связь по, информации отсутствует. Поток создается не из каналов связи, а вводом информации, например, с перфоввода или с магнитной ленты. [2]
Основная имитационная программа может включать подпрограмму расчета параметров производительности и параметров экономической эффективности при детерминированных характеристиках оборудования. Разыгрываются параметры обрабатываемых деталей и их число в партии. Это позволяет оценить качество выбранной компоновки РТК по всему спектру деталей.
Подпрограмма оценки качества компоновки используется для анализа конкурирующих вариантов РТК. Если качество РТК не удовлетворяет заданному ( с некоторым запасом), то изменяются компоновка, режимы резания либо оборудование. В результате этого этапа оценивается также требуемая вместимость накопителей. После выбора компоновки рассчитывается производительность и экономическая эффективность РТК с учетом надежности оборудования и инструмента. Отказы оборудования обычно делятся на две группы: отказы электромеханических узлов и отказы механических узлов. [3]
Более сложные имитационные программы реализуются на отдельных машинах, связанных с отлаживаемым объектом каналами связи. При этом в ответ на реальную управляющую информацию, поступающую от отлаживаемого объекта, имитатор выдает информацию за реальные объекты системы. [4]
Имитационные программы первого класса обычно достаточно сложные. Они должны отвечать всем основным видам управляющей информации, поступающей от испытуемого объекта с соответствующей реальной системой реакции. Реакция в общем случае должна быть случайной и соответствовать реальной системе как по содержанию передаваемой информации, так и по временным задержкам. [5]
Описываемая здесь имитационная программа позволяет имитировать прием входного сообщения из п символов п передачу выходного сообщения длиной т символов при времени машинной обработки р миллисекунд. Программа рассчитана па возможность имитации примерно 50 различных форматов входных ( выходных) сообщений. Для сообщений, длина которых распределена но нормальному закону, в имитационной программе задаются математическое ожидание и среднее квадратичное отклонение длины входных и выходных сообщений и времени машинной обработки. Операции расчета табличных значений, соответствующих нормальному распределению, возлагаются на вычислительную машину. Аналогично для сообщений, длина которых распределена по экспоненциальному закону, в имитационной программе задается математическое ожидание длины входных и выходных сообщений и времени выполнения программы. [6]
Описываемая здесь имитационная программа позволяет имитировать прием входного сообщения из п символов п передачу выходного сообщения длиной т символов при времени машинной обработки р миллисекунд. Программа рассчитана на возможность имитации примерно 50 различных форматов входных ( выходных) сообщений. Для сообщений, длина которых распределена по нормальному закону, в имитационной программе задаются математическое ожидание п среднее квадратичное отклонение длины входных н выходных сообщений и времени машинной обработки. Операции расчета табличных значении, соответствующих нормальному распределению, возлагаются на вычислительную машину. Аналогично для сообщений, длина которых распределена по экспоненциальному закону, в имитационной программе задается математическое ожидание длины входных и выходных сообщений п времени выполнения программы. [7]
Прогон имитационной программы , моделирующей работу крана в течение 1 месяца, занимал 25 мин; необходимый объем оперативной памяти составил 220К байт. [8]
Разработку имитационных программ следует планировать заранее. [9]
При исследовании трафика имитационная программа осуществляет периодические наблюдения за величиной перегрузки. [12]
После того, как имитационная программа на GPSS составлена, необходимо дополнить ее управляющими картами. Управляющие карты GPSS предназначены для определения режимов выполнения моделирующей программы и, если это необходимо, реконфигурации модели для повторных прогонов. [13]
Используемые при испытаниях объектов АСУ имитационные программы условно можно разделить на два класса; используемые при проверке объектов ( системы) на функционирование и используемые при проверке объектов ( системы) на производительность и определении вероятностно-временных характеристик. [14]
К вопросам, на которые имитационная программа поможет получить ответ, можно отнести следующие: Каково разумное требование к величине времени реакции. [15]
Источник: www.ngpedia.ru
Конспект лекций по имитационному моделированию
Имитационное моделирование (от англ. simulation) ― это распространенная разновидность аналогового моделирования, реализуемого с помощью набора математических инструментальных средств, специальных имитирующих компьютерных программ и технологий программирования, позволяющих посредством процессов-аналогов провести целенаправленное исследование структуры и функций реального сложного процесса в памяти компьютера в режиме «имитации», выполнить оптимизацию некоторых его параметров.
Имитационной моделью называется специальный программный комплекс, который позволяет имитировать деятельность какого-либо сложного объекта. Он запускает в компьютере параллельные взаимодействующие вычислительные процессы, которые являются по своим временным параметрам (с точностью до масштабов времени и пространства) аналогами исследуемых процессов.
Для этого вида моделирования используется синоним компьютерное моделирование. Так как имитационную модель нужно создавать, то для этого необходимо специальное программное обеспечение ― система моделирования (simulation system). Специфика такой системы определяется технологией работы, набором языковых средств, сервисных программ и приемов моделирования.
Имитационная модель должна отражать большое число параметров, логику и закономерности поведения моделируемого объекта во времени (временная динамика) и в пространстве (пространственная динамика). Моделирование объектов экономики связано с понятием финансовой динамики объекта. С точки зрения специалиста (информатика-экономиста, математика-программиста или экономиста-математика), имитационное моделирование контролируемого процесса или управляемого объекта ― это высокоуровневая информационная технология, которая обеспечивает два вида действий, выполняемых с помощью компьютера:
- работы по созданию или модификации имитационной модели;
- эксплуатацию имитационной модели и интерпретацию результатов.
Имитационное (компьютерное) моделирование экономических процессов обычно применяется в двух случаях:
- для управления сложным бизнес-процессом, когда имитационная модель управляемого экономического объекта используется в качестве инструментального средства в контуре адаптивной системы управления, создаваемой на основе информационных (компьютерных) технологий;
- при проведении экспериментов с дискретно-непрерывными моделями сложных экономических объектов для получения и отслеживания их динамики в экстренных ситуациях, связанных с рисками, натурное моделирование которых нежелательно или невозможно.
Можно выделить следующие типовые задачи, решаемые средствами имитационного моделирования при управлении экономическими объектами:
- моделирование процессов логистики для определения временных и стоимостных параметров;
- управление процессом реализации инвестиционного проекта на различных этапах его жизненного цикла с учетом возможных рисков и тактики выделения денежных сумм;
- анализ клиринговых процессов в работе сети кредитных организаций (в том числе применение к процессам взаимозачетов в условиях российской банковской системы);
- прогнозирование финансовых результатов деятельности предприятия на конкретный период времени (с анализом динамики сальдо на счетах);
- бизнес-реинжиниринг несостоятельного предприятия (изменение структуры и ресурсов предприятия-банкрота, после чего с помощью имитационной модели можно сделать прогноз основных финансовых результатов и дать рекомендации о целесообразности того или иного варианта реконструкции, инвестиций или кредитования производственной деятельности);
- анализ адаптивных свойств и живучести компьютерной региональной банковской информационной системы (например, частично вышедшая из строя в результате природной катастрофы система электронных расчетов и платежей после катастрофического землетрясения 1995 г. на центральных островах Японии продемонстрировала высокую живучесть: операции возобновились через несколько дней);
- оценка параметров надежности и задержек в централизованной экономической информационной системе с коллективным доступом (на примере системы продажи авиабилетов с учетом несовершенства физической организации баз данных и отказов оборудования);
- анализ эксплуатационных параметров распределенной многоуровневой ведомственной информационной управляющей системы с учетом неоднородной структуры, пропускной способности каналов связи и несовершенства физической организации распределенной базы данных в региональных центрах;
- моделирование действий курьерской (фельдьегерьской) вертолетной группы в регионе, пострадавшем в результате природной катастрофы или крупной промышленной аварии;
- анализ сетевой модели PERT (Program Evaluation and Review Technique) для проектов замены и наладки производственного оборудования с учетом возникновения неисправностей;
- анализ работы автотранспортного предприятия, занимающегося коммерческими перевозками грузов, с учетом специфики товарных и денежных потоков в регионе;
- расчет параметров надежности и задержек обработки информации в банковской информационной системе.
Система имитационного моделирования, обеспечивающая создание моделей для решения перечисленных задач, должна обладать следующими свойствами:
- возможностью применения имитационных программ совместно со специальными экономико-математическими моделями и методами, основанными на теории управления;
- инструментальными методами проведения структурного анализа сложного экономического процесса;
- способностью моделирования материальных, денежных и информационных процессов и потоков в рамках единой модели, в общем модельном времени;
- возможностью введения режима постоянного уточнения при получении выходных данных (основных финансовых показателей, временных и пространственных характеристик, параметров рисков и др.) и проведении экстремального эксперимента.
Имитационное моделирование как научная дисциплина появилась на рубеже 50–60-х гг. ХХ века. Научные исследования и практическое применение метода начались в США. Сегодня машинная имитация имеет широкое распространение в решении важных научных и народнохозяйственных задач.
Для построения имитационной модели может быть использован практически любой из универсальных языков программирования. Но такое решение проблемы едва ли будет рациональным при моделировании даже сравнительно простой системы. Гораздо более эффективным является использование специализированных систем имитационного моделирования. В настоящее время существует целый ряд таких систем, например инструмент визуального моделирования SIMULINK, входящий в состав пакета MATLAB. Но для моделирования дискретных систем вот уже на протяжении почти полувека (с 1961 года) наиболее универсальным средством остается система имитационного моделирования общего применения GPSS.
Источник: studfile.net