
Betaflight configurator , настройка на русском. После сборки всех компонентов квадрокоптера, нужно прошить мозг (полетный контроллер) и регуляторы оборотов специальной программой — это Betaflight и BLHeli.
В этой же статье, мы будем рассматривать структуру конфигуратора Betaflight и то, что в нем можно настроить.
Прошить — это загрузить программное обеспечение в устройство. Без прошивки ваш дрон никуда не полетит. Трудность настройки в том, что у прошивки сотни различных настроек для всех типов полетов и под конкретные нужды.
Цель этой статьи — помочь начать с минимального набора функций, необходимых для начала полета. Если вы впервые сталкиваетесь с прошивкой квадрокоптера, то эта инструкция для вас. Для начала, сделайте базовые настройки, чтобы просто начать летать, и уже потом, в процессе, начинайте делать остальные настройки.
В этой статье мы будем рассказывать о Betaflight Configurator версии 10.7 и на основе прошивки Betaflight 4.1.6, хотя есть уже и 4.2. Если у вас другая прошивка, например, CleanFlight, то не все тут будет совпадать с вашей прошивкой, так что, рекомендую все же прошить свой квадрокоптер в Betaflight, так как это самое популярное ПО для дронов, к тому же, часто обновляется.
Прошивка, betaflight от А до Я
Резервное копирование
Включите режим эксперта
Флажок «Включить режим эксперта» был сделан для того, чтобы не показывать функции, которые многие пилоты никогда не будут использовать, хотя, скорее всего это сделано для новичков, чтобы они не терялись, им будет доступен минимальный набор важных функций для настройки. Но вы явно уже не совсем новичок, раз читаете эту статью. Поэтому, рекомендуем вам включить режим эксперта:
На этой вкладке находятся настройки для UART-портов, то есть, для последовательных портов, которые используются для обмена данными с различными компонентами, такими как приемник, видеопередатчик, GPS-модуль и так далее. USB VCP всегда включен, это тот порт, в который вы вставляете провод, microUSB.
В этом разделе обязательно нужно включить порт, который используется для обмена информацией с приемником. У различных полетных контроллеров он может быть разным, у нас Mamba F405 и у него порт для приемника — UART1. Поэтому включен ползунок на Serial Rx. Вам нужно посмотреть документацию к своему полетному контролеру, чтобы точно знать, какой порт включать для приемника.
Узнайте больше о портах из документации Betaflight Serial.
Конфигурация
На этой вкладке выполняются базовые настройки, такие как протокол связи полетного протокола с регуляторами оборотов, протокол связи приемника с полетным протоколом, расположение платы и многое другое.
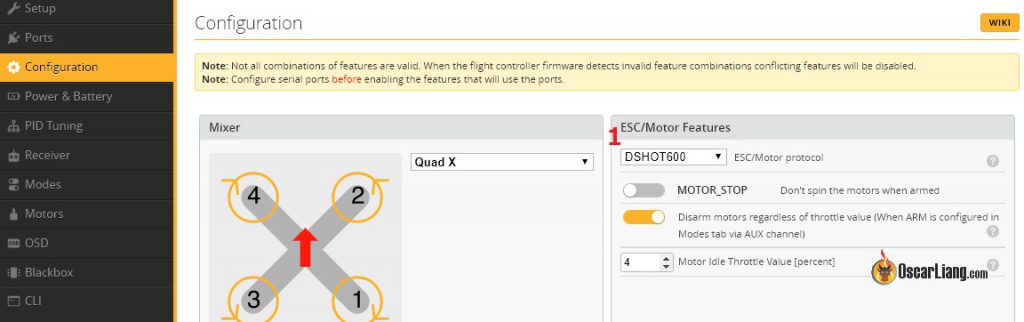
Настройки ESC/Моторов.
В этом блоке настраиваются протокол и двигатели.
DSHOT600 — это протокол на котором будут общаться регуляторы оборотов и полетный контроллер. Все современные ESC и ПК поддерживают DSHOT300, DSHOT600 и DSHOT1000 (есть и DSHOT1200). Выбирайте тот, который рекомендует производитель (такое всегда написано у продавца в товаре).
Betaflight — подготовка программ, подключение и прошивка
MOTOR-STOP — тут все понятно, после включения дрона (арминг) двигатели не будут крутиться. Обычно функцию не включают, так как нужно контролировать работу двигателей.
ESC_SENSOR — используется для включения телеметрии, если на ваших регуляторах для этого используется отдельный сигнальный провод.
Двухсторонний Dshot (на самом деле правильно Двунаправленный). Об этом читайте в этой статье: Двунаправленный (Bidirectional) DSHOT и RPM-фильтрация.
Полюса моторов — обязательно посчитайте количество магнитов в колоколе и напишите цифру в этом окошке.
Холостой ход — это то, с какой скоростью будут крутиться пропеллеры после арминга (включения). Обычно хватает 2-4%.
Расположение платы и датчиков.
В этом блоке обычно настраивается только «Первый ГИРО». Производители всегда ставят порт USB где-нибудь сбоку и пилот конечно же поставит плату полетного контроллера так, чтобы было удобно подключать провод. В этом случае, есть большой шанс, что Betaflight будет показывать модельку неправильно, то есть, вы наклоняете перед дрона вперед, а моделька наклоняется вправо. Чтобы это исправить, используется вот такой виртуальный поворот платы.
Максимальный наклон коптера. Если будет стоять маленькое число, то у вас дрон будет запускаться только на идеально ровной площадке. Поставьте 180 градусов, тогда дрон можно будет запустить хоть боком.
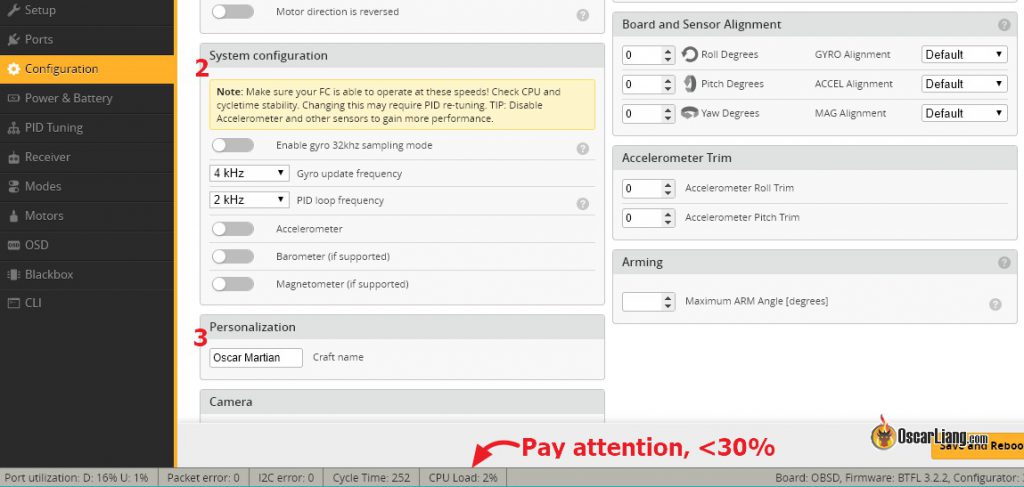
Системные настройки.
Здесь выбирается частота обновления вычислений гироскопа и цикла PID, чем они больше, тем чище будет лететь квадрокоптер в воздухе, но нужно следить, чтобы у процессора был запас для дополнительной работы, эта строчка показывается в самом низу программы:
Как видите, в нашем случае загрузка при максимальных частотах всего 23-25%.
В этом блоке также включаются датчики полетного контроллера, в нашем случае включен Акселерометр и Магнитометр.
Акселерометр включает и отключает автоматическую стабилизацию квадрокоптера.
Барометр включает и выключает функцию удержания высоты.
Магнитометр — это компас, позволяет удерживать дрон в одном направлении. В гоночных не используется, но на скрине включен для эксперимента.
Их не включают только в некоторых случаях, но вам точно надо их включить. Барометра в нашем ПК нет, поэтому он отключен.
Здесь выбирается режим работы, в нашем случае выбран режим с последовательной передачей данных и протоколом SBUS. В зависимости от производителя, у вас будет свой выбор, например, у FrSky используется SBUS, а у FlySky — IBUS. Ниже таблица соответствия бренд/протокол:
Название аппаратуры Serial Receiver Provider
DSM2 Satellite SPEKTRUM1024
DSMX Satellite SPEKTRUM2048
FrSky RX SBUS
Futaba RX SBUS
FlySky RX IBUS
Turnigy RX IBUS
Прочий функционал.
Как понятно из названия, здесь можно включить или отключить разные функции. На стандартном квадрокоптере, обычно включены:
TELEMETRY — чтобы была возможность принимать телеметрию;
AIRMODE — это ручной режим управления, без стабилизации. Включается, чтобы не было необходимости включать его тумблером, у опытных пилотов всегда включен, вы можете на время отключить.
OSD — чтобы в вашем шлеме или очках показывалась различная телеметрия, такая как, заряд аккумулятора, время и так далее;
DYNAMIC_FILTER — это новый фильтр, который появился не так давно. Позволяет дрону летать более стабильно.И для общего ознакомления об остальных:
INFLIGHT_ACC_CAL: Функция для долголетов, которые летают более 20 минут. Функция позволяет время от времени калибровать акселерометр. На гоночных и мини квадрокоптерах он калибруется при подключении аккумулятора.
SERVO_TILT: Функция включает сервопривод, которым можно в процессе полета регулировать наклон fpv камеры. Скорее всего у вас такого привода не будет.
SOFTSERIAL: Если вы будете подключать много компонентов по UART.
SONAR: Включает поддержку сонарных датчиков, например, датчик высоты.
LED_STRIP: управление LED-светодиодными лентами, настраиваются во вкладке “LED Strip”. Если нет таких лент, отключаем.
DISPLAY: Для подключения LED-дисплеев к квадрокоптеру.
CHANNEL_FORWARDING: Если вы хотите управлять сервоприводами через каналы RC AUX channels (каналы 5-16). После включения, каждый канал надо будет настроить.
TRANSPONDER: для подключения транспондера, это такая штука, которая пишет время, засекает его, секундомер.
Еще ниже есть блок Настройка пищалки. Здесь целая куча настроек, это все делается на ваш вкус:
После всех настроек, не забывайте нажимать кнопку «Сохранить и Перезагрузить» в нижнем правом углу, иначе у вас не сохранятся настройки.
Приемник и аппаратура управления
После настройки конфигурации, переходим к настройке раздела Приемник, здесь настраивается аппаратура управления.
Если вы летаете с помощью аппаратуры Taranis, FlySky, Turnigy или Spektrum, то вам нужно выбрать во вкладке “Таблица каналов” нужный пункт: “JR / Spektrum / Graupner” или «FrSky, Hutaba, Hitec», как в нашем случае и у вас автоматически вставится таблица AETR1234. После чего нажмите кнопку сохранить. Какую именно строчку нужно выбрать, написано в инструкции вашего пульта.
Видите слева таблицу с цветными полосками? Буквы в квадратных скобках соответствуют таблице работы вашей аппаратуры, то есть, на пульте 2 стика, у левого: газ [Т] и поворот по своей оси [R], у правого наклон вперед/назад [A] и вправо/влево [E]. Таблицу можно менять в настройках аппаратуры и для каждого действия привязать свою букву.
Пороги. Здесь прописывается цифровое значение стиков в крайнем нижнем положении и в крайнем верхнем положении, а также по центру. Настройка применяется для калибровки положения стиков на вашей аппаратуре. Значения по умолчанию обычно не требуют изменения.
Включите свой пульт и двигайте стики в разные стороны, разноцветные полоски будут бегать в разные стороны, от 1000 до 2000, а среднее положение, когда вы отпускаете стики, должны быть на отметке 1500 +- 1-2 единицы, но лучше чтобы было точно 1500. Потому что эти 2 градуса будут вносить свои коррективы в полете, а если будет 5, то вообще будет заметно. Если у вас не 1500, а немного другое, попробуйте подвигать в разные стороны число в поле RC Deadband, это мертвая зона. Если не получается, можно попробовать настроить сам пульт, для этого читайте инструкцию к своей аппаратуре.Лучше всего использовать для этой настройки маленькие кнопки по бокам стиков, называются они Trim (подрезка). Пощелкайте несколько раз нужной кнопкой подрезки, чтобы отрегулировать среднее значение до 1500 пунктов:
Источник: dzen.ru
Настраиваем Betaflight
В этом руководстве я покажу вам как сделать первоначальную настройку Betaflight. Для начала вам нужно будет нужно скачать конфигуратор и подключить полетный контроллер к компьютеру при помощи USB кабеля. Затем мы пройдем все необходимые шаги по настройке с самого начала и до первого полета.
Betaflight — отличная прошивка с открытым исходным кодом, разработана специально для гоночных коптеров.
Ниже я покажу простые шаги по настройке вашего первого коптера, достаточные для того, чтобы поднять его в воздух.
Другие руководства по прошивке Betaflight
Как только вы разберетесь с этим руководством, посмотрите и другие статьи/инструкции, они помогут вам разобраться с более продвинутым функционалом Betaflight.
- Консоль Betaflight (CLI)
- Режим AirMode
- Переназначение ресурсов (Resource Remapping)
- Настраиваем Failsafe (англ.)
- Betaflight OSD
- Управление видеопередатчиком (VTX control)
- Программная эмуляция последовательного порта (SoftSerial)
- LUA скрипты
- Телеметрия с регуляторов скорости (ESC)
- Управление курсовой камерой
- Фильтры (англ.)
- Какое время цикла (looptime) лучше использовать
- Порог придурковатости
- Разгоняем полетный контроллер до 32 кГц (англ.)
- Настраиваем PIDы при помощи Blackbox (инструкция несколько устарела)
Прежде чем начать
Чтобы сделать это руководство наиболее простым, я подразумеваю, что у вас есть вот это железо:
- Приемник FrSky с SBUS и SmartPort телеметрией
- Полетный контроллер на процессоре F3 или F4 с прошивкой Betaflight 3.2 или новее
- Регуляторы скорости, которые поддерживают протокол DShot
Настройка Betaflight для первого полета
Тут мы пройдемся по основным параметрам Betaflight, необходимым для первого полета.
Важно! Снимите все пропы с коптера прежде чем начинать настройку!
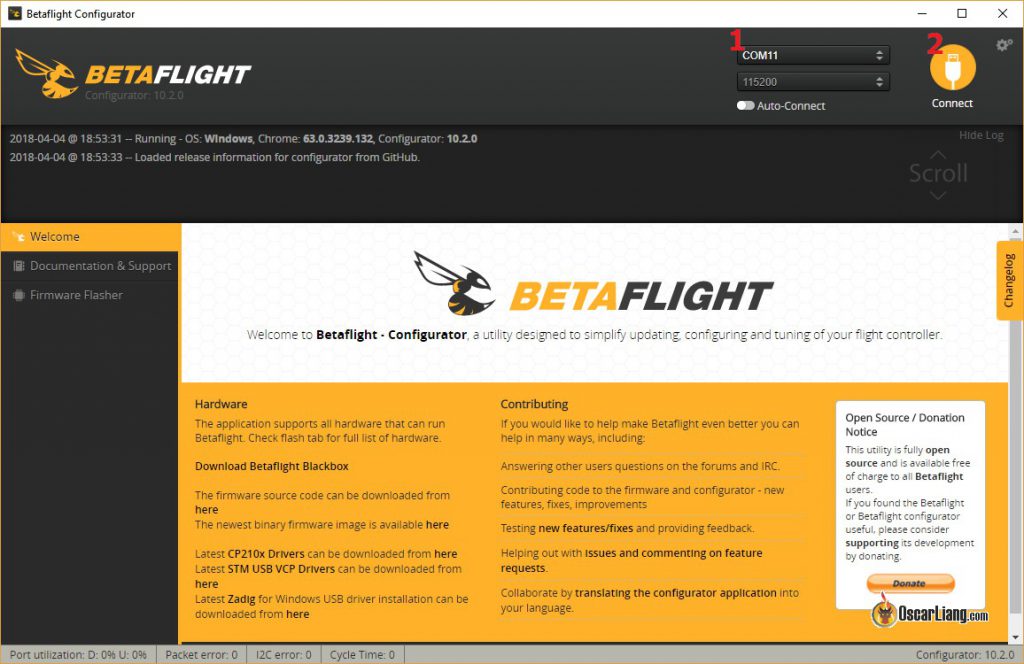
Подключаем Micro USB кабель
Подключенный MicroUSB кабель питает полетный контроллер.

В конфигураторе должен появиться новый COM порт, выберите его и нажмите «Connect«. В моем примере порт COM11, у вас скорее всего будет другой номер. При подключении разных ПК, номер порта тоже будет разным.
Вкладка Setup
Вы должны увидеть вкладку Setup сразу, как только подключитесь к полетному контроллеру.
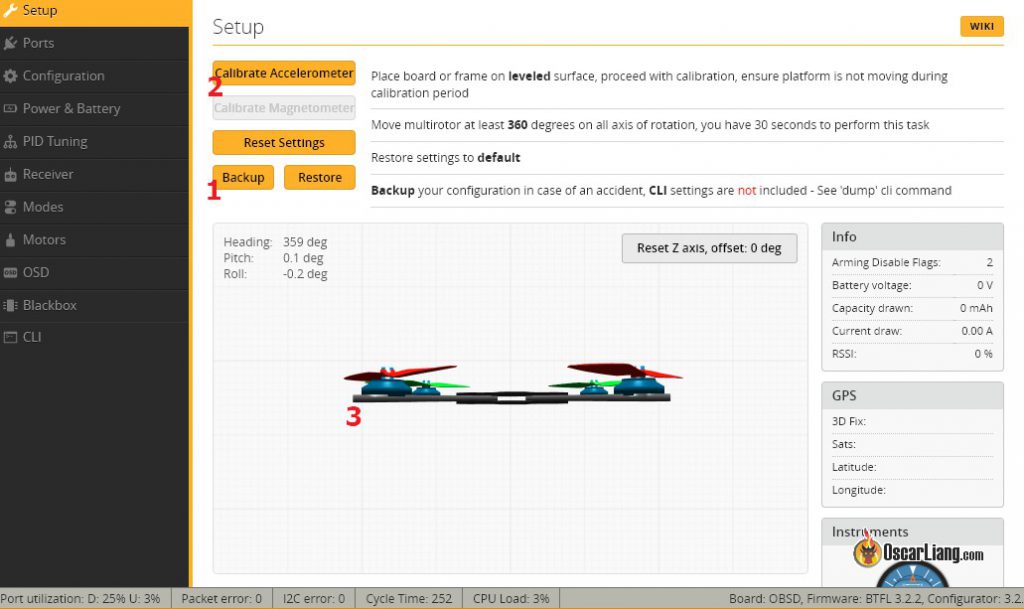
- Прежде чем менять настройки, сделайте резервную копию.
- Поставьте коптер на ровную горизонтальную поверхность, и откалибруйте акселерометры (см. картинку).
- Покрутите коптер в руках, 3Д модель должна вращаться так же, как и коптер
Если 3Д модель не двигается или двигается не так как коптер, тогда скорее всего полетный контроллер установлен не той стороной (обычно на плате есть стрелка, которая должна указывать вперед). В этом случае можно повернуть плату на коптере или задать YAW offset на вкладке Configuration (обычно это углы 90, 180 или 270 градусов).
Вкладка Ports
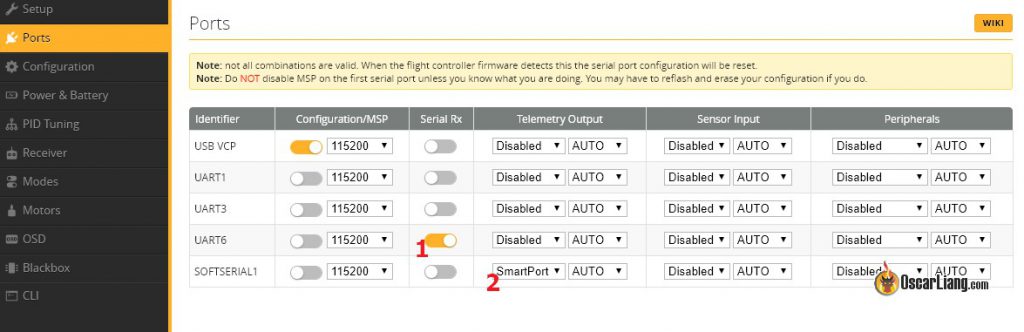
- Если у вас приемник SBUS или IBUS, тогда включите «Serial RX» на том порту, к которому приемник подключен.
- Если вы используете SmartPort телеметрию, тогда в столбце Telemetry Output выберите «SmartPort«; если не используете, тогда ничего не меняйте.
Вкладка Configuration
Протокол регуляторов скорости (регуляторов оборотов) — посмотрите на характеристики вашего оборудования, какие протоколы оно поддерживает. Рекомендуется использовать DShot. Обычно регуляторы с прошивкой BLHeli_S поддерживают DShot300 или DShot600, а с прошивкой BLHeli_32 — даже DShot1200.
Рекомендую отключить параметр «MOTOR_STOP«, иначе вы не сможете определить армлен коптер или нет.
Остальные параметры можно не трогать и оставить значения по умолчанию.
2. Раздел System Configuration
Looptime — время цикла, с этой частотой полетный контроллер рассчитывает полетные параметры, значение зависит от возможностей процессора, на шумных коптерах я предпочитаю использовать довольно низкую частоту 2 кГц, а на качественных коптерах — частоту повыше — 8 кГц. В любом случае, для начала подойдет и 2 кГц.
Gyro Sampling Rate — частота опроса гироскопов, обычно совпадает с looptime, хотя некоторые предпочитают поставить удвоенную частоту looptime. Можете поставить 4 кГц и looptime 2 кГц.
Потом поэкспериментируете и выберете наиболее подходящие значения, жестких правил по их выбору нет.
При смене значений этих параметров обратите внимание на CPU load (загрузка процессора) внизу экрана, старайтесь держать это значение меньше 30%. Если значение будет выше, то полетный контроллер может работать нестабильно.
Accelerometer — можно отключить, это высвободит немного процессорных ресурсов, но тогда вы не сможете использовать режимы Angle и Horizon, а 3Д модель на вкладке Setup перестанет двигаться. Еще одна причина по которой отключают эту функцию — чтобы избежать проблем при арминге коптера, если он сильно наклонен.
Отключите Barometer и Magnetometer, они нам не нужны, т.к. мы летаем на миникоптере.
3. Раздел Personalization
Craft name — название коптера, это значение будет отображаться на экране при помощи Betaflight OSD.
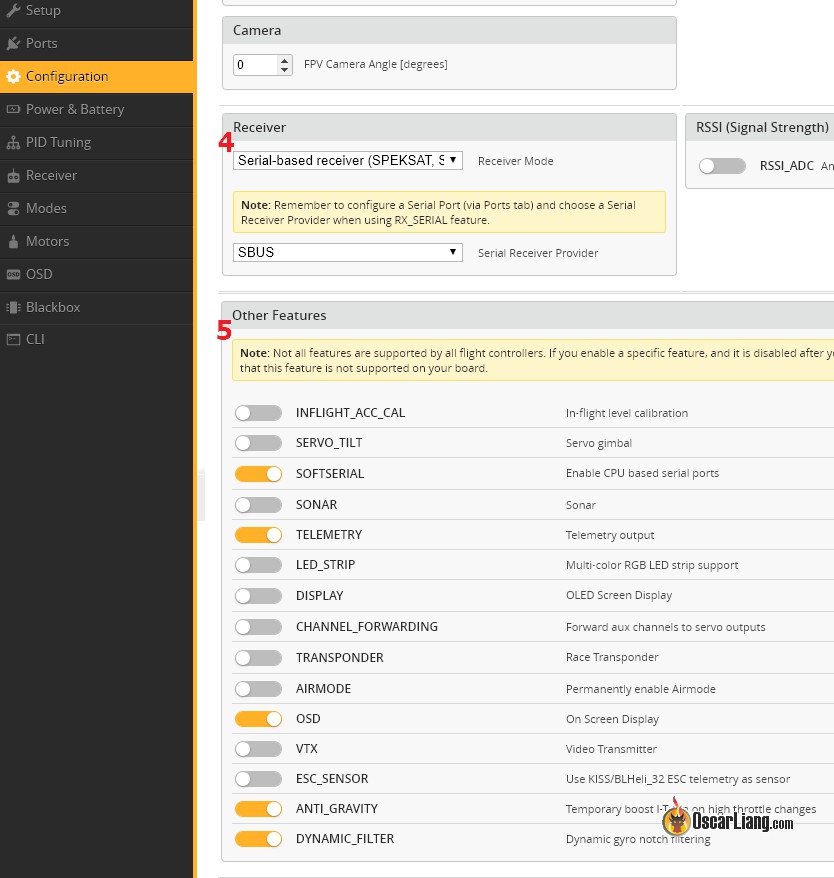
4. Раздел Receiver
Если у вас приемник SBUS, IBUS или Spektrum Satellite, тогда выбирайте «Serial-based receiver» в выпадающем списке «Receiver Mode». В параметре Serial Receiver Provider нужно выбрать SBUS, т.к. у нас приемник FrSky.
Если приемник использует PPM, тогда выберите PPM RX Input в списке Receiver Mode.
5. Раздел Other Features
Обычно я включаю нижеуказанные функции Betaflight. Если вы не уверены в том, нужны ли они, просто оставьте значения по умолчанию, они не помешают первому полету.
- Anti-Gravity
- Dynamic Filter
- Telemetry (чтобы работала SmartPort телеметрия)
- OSD (если ваш ПК поддерживает Betaflight OSD)
Нажмите Save https://rcdetails.info/nastraivaem-betaflight/» target=»_blank»]rcdetails.info[/mask_link]
betaflight/betaflight
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Switch branches/tags
Branches Tags
Could not load branches
Nothing to show
Could not load tags
Nothing to show
Name already in use
A tag already exists with the provided branch name. Many Git commands accept both tag and branch names, so creating this branch may cause unexpected behavior. Are you sure you want to create this branch?
Cancel Create
- Local
- Codespaces
HTTPS GitHub CLI
Use Git or checkout with SVN using the web URL.
Work fast with our official CLI. Learn more about the CLI.
Sign In Required
Please sign in to use Codespaces.
Launching GitHub Desktop
If nothing happens, download GitHub Desktop and try again.
Launching GitHub Desktop
If nothing happens, download GitHub Desktop and try again.
Launching Xcode
If nothing happens, download Xcode and try again.
Launching Visual Studio Code
Your codespace will open once ready.
There was a problem preparing your codespace, please try again.
Latest commit
1333771 Jul 2, 2023
SA is always unidirectional Only switch AT32 TX line to input when transmission is complete
Git stats
Files
Failed to load latest commit information.
Latest commit message
Commit time
README.md
Betaflight is flight controller software (firmware) used to fly multi-rotor craft and fixed wing craft.
This fork differs from Baseflight and Cleanflight in that it focuses on flight performance, leading-edge feature additions, and wide target support.
| 01-11-2022 | Firmware 4.4 Feature freeze |
| 29-01-2023 | Firmware 4.4 Release |
Requirements for the submission of new and updated targets
The following new requirements for pull requests adding new targets or modifying existing targets are put in place from now on:
- Read the hardware specification
- No new F3 based targets will be accepted;
- For any new target that is to be added, only a Unified Target config into https://github.com/betaflight/unified-targets/tree/master/configs/default needs to be submitted. See the instructions for how to create a Unified Target configuration. If there is no Unified Target for the MCU type of the new target (see instructions above), then a ‘legacy’ format target definition into src/main/target/ has to be submitted as well;
- For changes to existing targets, the change needs to be applied to the Unified Target config in https://github.com/betaflight/unified-targets/tree/master/configs/default. If no Unified Target configuration for the target exists, a new Unified Target configuration will have to be created and submitted. If there is no Unified Target for the MCU type of the new target (see instructions above), then an update to the ‘legacy’ format target definition in src/main/target/ has to be submitted alongside the update to the Unified Target configuration.
Betaflight has the following features:
- Multi-color RGB LED strip support (each LED can be a different color using variable length WS2811 Addressable RGB strips — use for Orientation Indicators, Low Battery Warning, Flight Mode Status, Initialization Troubleshooting, etc)
- DShot (150, 300 and 600), Multishot, Oneshot (125 and 42) and Proshot1000 motor protocol support
- Blackbox flight recorder logging (to onboard flash or external microSD card where equipped)
- Support for targets that use the STM32 F4, G4, F7 and H7 processors
- PWM, PPM, SPI, and Serial (SBus, SumH, SumD, Spektrum 1024/2048, XBus, etc) RX connection with failsafe detection
- Multiple telemetry protocols (CRSF, FrSky, HoTT smart-port, MSP, etc)
- RSSI via ADC — Uses ADC to read PWM RSSI signals, tested with FrSky D4R-II, X8R, X4R-SB, configuration without needing third-party OSD software/firmware/comm devices
- OLED Displays — Display information on: Battery voltage/current/mAh, profile, rate profile, mode, version, sensors, etc
- In-flight manual PID tuning and rate adjustment
- PID and filter tuning using sliders
- Rate profiles and in-flight selection of them
- Configurable serial ports for Serial RX, Telemetry, ESC telemetry, MSP, GPS, OSD, Sonar, etc — Use most devices on any port, softserial included
- VTX support for Unify Pro and IRC Tramp
- and MUCH, MUCH more.
Support and Developers Channel
There’s a dedicated Discord server here:
We also have a Facebook Group. Join us to get a place to talk about Betaflight, ask configuration questions, or just hang out with fellow pilots.
Etiquette: Don’t ask to ask and please wait around long enough for a reply — sometimes people are out flying, asleep or at work and can’t answer immediately.
To configure Betaflight you should use the Betaflight-configurator GUI tool (Windows/OSX/Linux) which can be found here:
Contributions are welcome and encouraged. You can contribute in many ways:
- implement a new feature in the firmware or in configurator (see below);
- documentation updates and corrections;
- How-To guides — received help? Help others!
- bug reporting
- new feature ideas
- provide a new translation for configurator, or help us maintain the existing ones (see below).
The best place to start is the Betaflight Discord (registration here). Next place is the github issue tracker:
Before creating new issues please check to see if there is an existing one, search first otherwise you waste people’s time when they could be coding instead!
If you want to contribute to our efforts financially, please consider making a donation to us through PayPal.
If you want to contribute financially on an ongoing basis, you should consider becoming a patron for us on Patreon.
Contribution of bugfixes and new features is encouraged. Please be aware that we have a thorough review process for pull requests, and be prepared to explain what you want to achieve with your pull request. Before starting to write code, please read our development guidelines and coding style definition.
GitHub actions are used to run automatic builds
We want to make Betaflight accessible for pilots who are not fluent in English, and for this reason we are currently maintaining translations into 21 languages for Betaflight Configurator: Català, Dansk, Deutsch, Español, Euskera, Français, Galego, Hrvatski, Bahasa Indonesia, Italiano, 日本語, 한국어, Latviešu, Português, Português Brasileiro, polski, Русский язык, Svenska, 简体中文, 繁體中文. We have got a team of volunteer translators who do this work, but additional translators are always welcome to share the workload, and we are keen to add additional languages. If you would like to help us with translations, you have got the following options:
- if you help by suggesting some updates or improvements to translations in a language you are familiar with, head to crowdin and add your suggested translations there;
- if you would like to start working on the translation for a new language, or take on responsibility for proof-reading the translation for a language you are very familiar with, please head to the Betaflight Discord chat (registration here), and join the ‘translation’ channel — the people in there can help you to get a new language added, or set you up as a proof reader.
Betaflight does not manufacture or distribute their own hardware. While we are collaborating with and supported by a number of manufacturers, we do not do any kind of hardware support. If you encounter any hardware issues with your flight controller or another component, please contact the manufacturer or supplier of your hardware, or check RCGroups https://rcgroups.com/forums/showthread.php?t=2464844 to see if others with the same problem have found a solution.
Open Source / Contributors
Betaflight is software that is open source and is available free of charge without warranty to all users.
Betaflight is forked from Cleanflight, so thanks goes to all those whom have contributed to Cleanflight and its origins.
Origins for this fork (Thanks!):
- Alexinparis (for MultiWii),
- timecop (for Baseflight),
- Dominic Clifton (for Cleanflight),
- borisbstyle (for Betaflight), and
- Sambas (for the original STM32F4 port).
The Betaflight Configurator is forked from Cleanflight Configurator and its origins.
Origins for Betaflight Configurator:
- Dominic Clifton (for Cleanflight configurator), and
- ctn (for the original Configurator).
Big thanks to current and past contributors:
- Budden, Martin (martinbudden)
- Bardwell, Joshua (joshuabardwell)
- Blackman, Jason (blckmn)
- ctzsnooze
- Höglund, Anders (andershoglund)
- Ledvina, Petr (ledvinap) — IO code awesomeness!
- kc10kevin
- Keeble, Gary (MadmanK)
- Keller, Michael (mikeller) — Configurator brilliance
- Kravcov, Albert (skaman82) — Configurator brilliance
- MJ666
- Nathan (nathantsoi)
- ravnav
- sambas — bringing us the F4
- savaga
- Stålheim, Anton (KiteAnton)
And many many others who haven’t been mentioned.
Источник: github.com