
Наряду с контроллером и сенсорами, актуаторы являются важным составляющим всех без исключения роботов. Они вращают колеса робота, позволяя ему перемещаться в пространстве, и приводят в действие мощные манипуляторы, которыми он хватает предметы.
В этом уроке мы будем работать с одним из таких актуаторов, который называется сервоприводом (или сервомашинкой). В отличие от обычного электромотора, сервопривод представляет собой сложное составное устройство, состоящее из двигателя постоянного тока, шестеренного редуктора, потенциометра и электронной схемы. Всё это позволяет сервоприводу поворачивать вал строго на заданный угол, и удерживать его. С помощью таких приводов можно, например, сделать вот такой несложный манипулятор:
1. Подключение к Ардуино
Итак, как уже говорилось выше, сервопривод славится тем, что может поворачиваться на заданный угол. Как же мы будем указывать ему этот угол? Предлагаю использовать для этой цели переменный резистор, он же — потенциометр. Будем вращать ручку потенциометра, а контроллер будет командовать сервоприводу поворачиваться на соответствующий угол.
Сервопривод, принцип работы и подключение к Ардуино
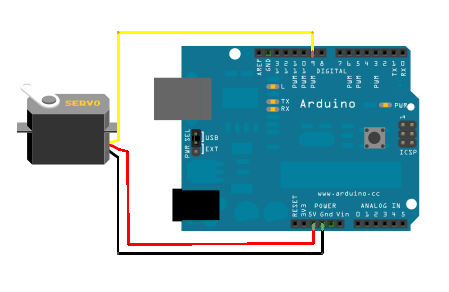
У потенциометра есть всего три вывода. Крайние подключим к +5В и земле, а центральный к аналоговому входу A0.
У сервопривода SG90 также имеется три контакта. Обычно они окрашиваются следующим образом:
- коричневый — земля;
- красный — питание +5В;
- оранжевый (или желтый) — сигнальный.
Сигнальный провод подключим в цифровому выходу №8. В итоге, получим такую схему:

Подключать оба устройства к Ардуино Уно удобнее через макетную плату:

2. Программа
Теперь напишем несложную программу, которая свяжет все элементы нашего аппарата строгой логикой. Все что нам требуется от контроллера — это:
- считывать показания с потенциометра в диапазоне от 0 до 1023;
- преобразовывать полученное число в угол от 0 до 180 градусов;
- передавать полученный угол на сервопривод.
Для написания программы используем наш визуальный редактор. Задействуем блок сервопривода, блок чтения из аналогового порта и функцию отображения одного диапазона значений в другой.

Нажав в конструкторе кнопку «Arduino», откроем страницу с исходным кодом программы для среды Arduino IDE:
#include Servo servos[13]; void setup() < >void loop()
Как видно из программы, для управления сервоприводом мы использовали библиотеку Servo. В этой библиотеке есть несколько полезных нам функций:
Уроки Arduino — управление сервомашинкой
- attach(номер_вывода) — инициализация сервопривода;
- write(угол) — поворот сервопривода на заданный угол;
- read() — получение текущего угла сервопривода.
Для отображения множества чисел 0 — 1023 в множество 0-180, конструктор применил функцию map. Ту же самую операцию, можно было осуществить с помощью выражения:
int angle = (value / 1023.0) * 180;
Загружаем программу на Ардуино Уно, и смотрим что получилось!
Теперь, вы знаете что такое сервопривод, и можете легко им управлять. Вперед! К созданию роботов-манипуляторов и шагающих роботов-пауков!
Изменено: 25 Май, 2015 05:55
Ардуино: управление сервоприводом : 2 комментария
Иван говорит 11.12.2017 в 22:37 :
Приветствую! А как сделать вместо потенциометра на одной кнопке постоянное вращение на определенный угол туда сюда(80-100),а двумя другими увеличивать амплитуду (60-110) и уменьшать её 85-95?
Тарас говорит 16.04.2019 в 13:13 :
Як зробити щоб серво привод повертався по годинам. Наприклад . в 2 часа на 90 градусів . в 4 часа на 120 градусів
Источник: robotclass.ru
Урок №12.Сервоприводы Ардуино SG90, MG995: схема подключения и управление

Одним из важнейших элементов робототехники является сервопривод, с его помощью мы меняем направление робота, крутим датчики и другие элементы роботов, с его помощью двигаются манипуляторы, руки и ноги роботов.
В этой статье мы поговорим о сервоприводах в проектах Ардуино. Именно благодаря серводвигателям обычные электронные проекты становятся робототехническими. Подключение серво к Arduino проекту позволяет реагировать на сигналы датчиков каким-то точным движением, например, открыть дверцу или повернуть в нужную сторону сенсоры. В статье рассмотрены вопросы управления сервоприводами, возможные схемы подключения серво к ардуино, а также примеры скетчей.
Сервопривод для Ардуино
Сервопривод — это такой вид привода, который может точно управлять параметрами движения. Другими словами, это двигатель, который может повернуть свой вал на определенный угол или поддерживать непрерывное вращение с точным периодом.

Схема работы сервопривода основана на использовании обратной связи (контура с замкнутой схемой, в котором сигнал на входе и выходе не согласован). В качестве сервопривода может выступать любой тип механического привода, в составе которого есть датчик и блок управления, который автоматически поддерживает все установленные параметры на датчике. Конструкция сервопривода состоит из двигателя, датчика позиционирования и управляющей системы. Основной задачей таких устройств является реализация в области сервомеханизмов. Также сервоприводы нередко используются в таких сферах как обработка материалов, производство транспортного оборудования, обработка древесины, изготовление металлических листов, производство стройматериалов и другие.
В проектах ардуино робототехники серво часто используется для простейших механических действий:
- Повернуть дальномер или другие датчики на определенный угол, чтобы измерить расстояние в узком секторе обзора робота.
- Сделать небольшой шаг ногой, движение конечностью или головой.
- Для создания роботов-манипуляторов.
- Для реализации механизма рулевого управления.
- Открыть или закрыть дверку, заслонку или другой предмет.
Конечно, сфера применения серво в реальных проектах гораздо шире, но приведенные примеры являются самыми популярными схемами.
Схема и типы сервоприводов

Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами. Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия — например, выключается двигатель. Самым простым вариантов реализации является переменный резистор, который управляется валом — при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые и цифровые сервоприводы. Первые используют что-то, похожее на потенциометр, вторые — контроллеры.

Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Выделяют два основных вида серводвигателей — с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов). Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни. В более дорогих моделях можно найти элементы из карбона и даже титана.


Пластмассовые варианты, естественно, дешевле, проще в производстве и часто используются в недорогих моделях серво. Для учебных проектов, когда сервопривод делает несколько движений, это не страшно. Но в серьезных проектах использование пластмассы невозможно, в виду очень быстрого снашивания таких шестеренок под нагрузкой.

Металлические шестеренки надежнее, но это, безусловно, сказывается как на цене, так и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни — самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Отличия серво и обычного двигателя
Включая или выключая обычный электрический двигатель, мы можем сформировать вращательное движение и заставить двигаться колеса или другие предметы, прикрепленные к валу. Движение это будет непрерывным, но для того, чтобы понять, на какой угол повернулся вал или сколько оборотов он сделал, потребуется устанавливать дополнительные внешние элементы: энкодеры. Сервопривод уже содержит все необходимое для получения информации о текущих параметрах вращения и мжет самостоятельно выключаться, когда вал повернется на необходимый угол.
Отличия серво и шагового мотора

Важным отличием серводвигателя от шагового двигателя является возможность работать с большими ускорениями и при переменной нагрузке. Также серводвигатели обладают более высокой мощностью. Шаговые двигатели не обладают обратной связью, поэтому может наблюдаться эффект потери шагов, в серводвигателях потери шагов исключены – все нарушения будут зафиксированы и исправлены. При всех этих явных преимуществах серводвигатели являются более дорогостоящими приборами, чем шаговые двигатели, обладают более сложной системой подключения и управления и требуют более квалифицированного обслуживания. Важно отметить, что шаговые двигатели и сервоприводами не являются прямыми конкурентами – каждое из этих устройств занимает свою определенную сферу применения.
Управление сервоприводом

Решающее значение в управлении сервоприводами выполняет управляющий сигнал, который представляет собой импульсы постоянной частоты и переменной ширины. Длина импульса – это один из важнейших параметров, который определяет положение сервопривода. Эту длину можно задать в программе вручную методом подбора через угол или использовать команды библиотеки. Для каждой марки устройства длина может быть различной.
Когда сигнал попадает в управляющую схему, генератор подает свой импульс, длительность которого определяется с помощью потенциометра. В другой части схемы происходит сравнение длительности поданного сигнала и сигнала с генератора. Если эти сигналы разные по длительности, включается электромотор, направление вращения которого определяется тем, какой из импульсов короче. При равенстве длины импульсов мотор останавливается.

Стандартная частота, с которой подаются импульсы, равна 50 Гц, то есть 1 импульс в 20 миллисекунд. При таких значениях длительность составляет 1520 микросекунд, и сервопривод занимает среднее положение. Изменение длины импульса приводит к повороту сервопривода – при увеличении длительности поворот осуществляется по часовой стрелке, при уменьшении – против часовой стрелки. Имеются границы длительности – в Ардуино в библиотеке Servo для 0° установлено значение импульса в 544 мкс (нижняя граница), для 180° — 2400 мкс (верхняя граница).

(Использовано изображение с сайта amperka.ru)
Важно учитывать, что на конкретном устройстве настройки могут несколько отличаться от общепринятых значений. У некоторых устройств среднее положение и ширина импульса может быть равной 760 мкс. Все принятые значения также могут незначительно отличаться из-за погрешности, которая может быть допущена при производстве устройства.
Способ управления приводом часто по ошибке называют PWM/ШИМ, но это не совсем корректно. Управление напрямую зависит именно от длины импульса, частота их появления не так важна. Корректная работа будет обеспечена как при 40 Гц, так и при 60 Гц, вклад внесет только сильное уменьшение или увеличение частоты. При резком спаде сервопривод начнет работать рывками, при завышении частоты выше 100 Гц устройство может перегреться. Поэтому правильнее называть PDM.
По внутреннему интерфейсу можно выделить аналоговые и цифровые сервоприводы. Внешних отличий нет – все различия только во внутренней электронике. Аналоговый сервопривод внутри содержит специальную микросхему, цифровой – микропроцессор, принимающий и анализирующий импульсы.
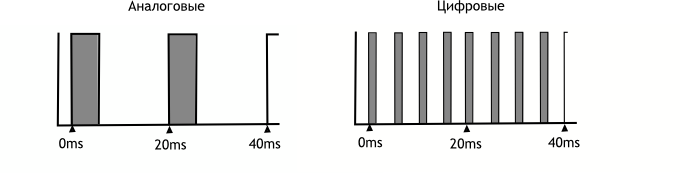
При получении сигнала аналоговый сервопривод принимает решение, менять или нет положение, и по необходимости подает на мотор сигнал с частотой 50 Гц. За время реакции (20 мс) могут произойти внешние воздействия, которые изменят положение сервопривода, и устройство не успеет среагировать.
Цифровой сервопривод использует процессор, который подает и обрабатывает сигналы с большей частотой – от 200 Гц, поэтому он может быстрее отреагировать на внешние воздействия, быстрее развивать нужную скорость и крутящий момент. Следовательно, цифровой сервопривод будет лучше удерживать заданное положение. При этом для работы цифрового сервопривода требуется больше электроэнергии, что повышает их стоимость. Большой вклад в цену делает и сложность их производства. Высокая стоимость – единственный недостаток цифровых сервоприводов, в техническом плане они намного лучше аналоговых устройств.
Подключение серводвигателя к ардуино
Сервопривод обладает тремя контактами, которые окрашены в разные цвета. Коричневый провод ведет к земле, красный – к питанию +5В, провод оранжевого или желтого цвета – сигнальный. К Ардуино устройство подключается через макетную указанным на рисунке образом. Оранжевый провод (сигнальный) подключается к цифровому пину, черный и красный — к земле и питанию соответственно. Для управления серводигателем не требуется подключение именно к шим-пинам — принцип управления серво мы уже описывали ранее.
Не рекомендуется подключать мощные серво напрямую к плате , т.к. они создают для схемы питания Arduino ток, не совместимый с жизнью — повезет, если сработает защита. Чаще всего симптомы перегрузки и неправильного питания сервопривода заключаются в «дергании» серво, неприятному звуку и перезагрузке платы. Для питания лучше использовать внешние источники, обязательно объединяя земли двух контуров.
Скетч для управления сервоприводом в Arduino
Управление сервоприводом напрямую через изменение в скетче длительности импульсов — достаточно нетривиальная задача, но у нас, к счастью, есть отличная библиотека Servo, встроенная в среду разработки Arduino. Все нюансы программирования и работы с сервоприводами мы рассмотрим в отдельной статье. Здесь же приведем простейший пример использования Servo.
Алгоритм работы прост:
- Для начала мы подключаем Servo.h
- Создаем объект класса Servo
- В блоке setup указываем, к какому пину подключен серво
- Используем методы объекта обычным для C++ способом. Самым популярным является метод write, которому мы подаем целочисленное значение в градусах (для сервопривода 360 эти значения будут интерпретироваться по-другому).
Пример простого скетча для работы с сервоприводом
Пример проекта, в котором мы сразу сначала устанавливаем серводвигатель на нулевой угол, а затем поворачиваем на 90 градусов.
Источник: portalrabot.ru
Сервомотор и Arduino
Учимся управлять сервомотором с использованием Arduino.
Сначала мы рассмотрим как обеспечить вращение выходного вала серводвигателя в автоматическом режиме «вперед» и в обратном направлении. После этого дополнительно включим в схему потенциометр, который обеспечит управление поворотом сервопривода.
Необходимые узлы
Для того, чтобы освоить приведенные в статье методики управления сервоприводом вам понадобятся:

1 переменный резистор (потенциометр) на 10 кОм


1 микроконтроллер Arduino Uno


1 конденсатор на 100 мкФ (не обязательно)

Схема подключения для ‘Sweep’ (автоматическое вращение)
Для этого эксперимента вам надо подключить к Arduino только сервомотор.

На сервомоторе 3 контакта. Цвет контактов может отличаться в зависимости от фирмы производителя, но красный — это всегда контакт 5 В. Контакт GND (земля) может быть черным или коричневым. Оставшийся третий контакт — это сигнал, который используется для управления положением ротора сервы. Обычно он желтого или желтого цветов. Этот контакт мы подключаем к цифровому пину 9 на Arduino.
На контактах сервы предусмотрены разъемы, в которые можно установить коннекторы (провода) и соединить из макетной платой, а потом с Arduino.

Серводвигатель дергается
Иногда при подключении сервы не отрабатывают заданные команды или отрабатывают некорректно. Причем происходить это может только при подключении к определенным USB портам. Причина в том, что сервы требуют достаточно большую мощность для питания, особенно в начале движения ротора. Эти резкие скачки потребляемой мощности могут сильно «просаживать» напряжение на Arduino. Может произойти даже перезагрузка платы.
Если подобное происходит, вам надо добавить конденсатор (470 мкФ или больше) между рельсами GND и 5V на вашей макетке.

Конденсатор выполняет роль своебразного резервуара для электрического тока. Когда серводвигатель начинает работать, он получает остатки заряда с конденсатора и от источника питания Arduino одновременно.
Длинная нога конденсатора — это позитивный контакт, она подключается к 5V. Отрицательный контакт часто маркируется символом ‘-‘.
Скетч Arduino ‘Sweep’ (автоматическое вращение)
Загрузите на Arduino скетч, который рассмотрен ниже. После загрузки ротор сервы должен начать вращаться в одном направлении, а потом в противоположном.
Программа основана на стандартном скетче ‘sweep’, который вы можете найти в меню Arduino Examples в папке ‘servo’.
int servoPin = 9;
int angle = 0; // угол сервы в градусах
Источник: arduino-diy.com