
Программа работы микроконтроллера заключается в следующем:
при нажатии кнопки RESET (SB1) производится непрерывный (циклический) опрос датчика и сохранение полученных значений температуры в ОЗУ.
непрерывлый вывод полученных значений температуры на ЖКИ индикатор (цифровое отображение информации на экране)
формирование сигнала предупреждения с помощью блока светодиодов в случае выхода значения температуры за пределы 300С
Алгоритм программы приведен на рисунке 4.1.
Первым действием в программе производятся начальные установки микроконтроллера. В них устанавливается указатель стека на последнюю ячейку ОЗУ, исходное состояние каналов связи с датчиками температуры и UART, скорость обмена по UART, разрешаются прерывания от таймера/счетчика0 и от UART, переписывается количество и индивидуальные адреса датчиков температуры из EEPROM в ОЗУ, в регистры записываются необходимые константы.
Когда начальные установки завершены, начинается часть программы, которая производит опрос датчика температуры. Она будет циклически повторятся, пока подводится питание к микроконтроллеру или пока не возникнет запрос на прерывание. Опрос датчика температуры начинается с сигнала сброса на линии (блок 2 рисунок 4.1) Затем следует команда игнорирования адреса датчика температуры SKIP ROM [CCh].
Микроконтроллеры это просто.#0 ЦПУ.
Команда начала измерения температуры CONVERT T [44h] (блок 4, рисунок 4.1) разрешает преобразование значений температуры в цифровой вид для датчика.
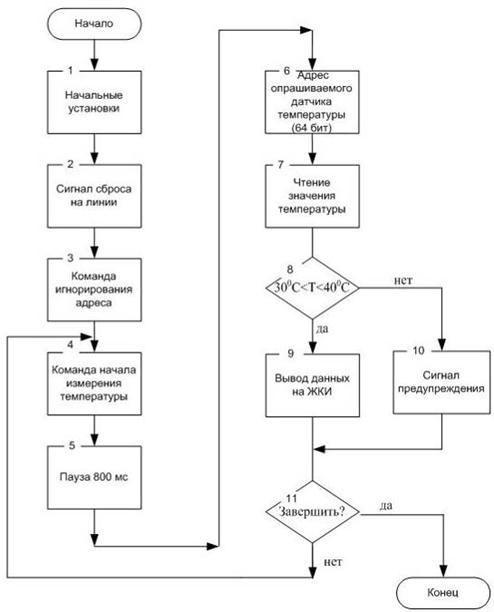
Рисунок 4.1 – Алгоритм работы микроконтроллера
Аналого-цифровое преобразование значений температуры занимает время от 750 мс до 800 мс. Поэтому, чтобы получить правильное значение температуры, необходимо выждать паузу 800 мс (блок 5, рисунок 4.1). Пауза выдерживается с помощью таймера/счетчика 0. Во время паузы можно совершать другие действия (например, произвести обмен данными с компьютером или вывести результаты на ЖКИ).
После паузы производится опрос датчика. Опрос датчика начинается с сигнала сброса на линии связи с датчиком (блок 6, рисунок 4.1). После сигнала сброса и ответного сигнала от датчика следует команда MATCH ROM [55h]. Эта команда сообщает датчику, что после неё на линии связи будет выставлен индивидуальный 64-х битовый адрес датчика. После того, как адрес выставлен на линии, датчик температуры сравнивает выставленный адрес со своим собственным адресом, и, после этого к работе с микроконтроллером датчик готов.
В блоке 7 производится чтение значения температуры и запись его в соответствующие ячейки ОЗУ.
Если необходимо продолжать измерять температуру (блок 11), то переходят к блоку 4, если нет, то тогда происходит завершение программы.
Программа работы микроконтроллера для измерения температуры приведена в приложении А.
В данном курсовом проекте был разработан цифровой термометр, позволяющий снимать температуру датчиком температуры ТМР35, обрабатывать полученную информацию и выводить результат измерений в цифровом виде на экран ЖК индикатора. Также с помощью последовательного интерфейса возможна их передача на экран персонального компьютера для получения и сохранения неограниченного количество этих значений, проведения статистического анализа и слежение за изменением температуры во времени для разных этапов измерения.
лекция 321. Введение в микроконтроллеры(Atmega-8)
В ходе проектирования были разработаны структурная и принципиальная электрическая схемы, алгоритм работ и текст программы для микроконтроллерной системы.
Таким образом, разработанный цифровой термометр является компактным, переносным устройством, дающим точную информацию о температуре, что позволяет расширить возможности измерений.
Список источников информации
1. Голубцов М.С., Кириченкова А.В. Микроконтроллеры AVR: от простого к сложному. Изд.2-е, испр. И доп. – М.: СОЛОН- Пресс, 2006. 304с.- (Серия «Биб-лиотека инженера»).
2. Китаев Ю.В. Основы программирования микроконтроллеров AT MEGA128 и 68HC908. Учебное пособие : СПб: СпбГУ ИТМО, 2007, 107с.
3. Low Voltage Temperature Sensors. TMP35/TMP36/TMP37
5. Температурные измерения. Справочник./ Геращенко О.А. Гордов А.Н., Еремина А.К., и др.; отрв. Ред. Геращенко О.А.; АН УССР Ин-т проблем энергосбережения. – Киев: Наук. думка, 1989г. 704 с.
6. http://www.chip-dip.ru/product0/61922.aspx Кнопки тактовые.
; Системные определения для 320 STK/EVK
TOOL SET 0 ; 0 = STK/EVK ОЗУ
; 2 = Встроенное ПЗУ
STACK EQU 003DEH ; Указатель стека
RAM_ORIG EQU 00200H ; Начальный адрес памяти ОЗУ
ROM_ORIG EQU 0C100H ; Начальный адрес памяти ПЗУ
I_VECTORS EQU 003FFH ; Вектора прерываний в ОЗУ
MAIN EQU RAM_ORIG+20H ; Стартовый адрес программы в ОЗУ
BTLOAD EQU 035H ; Прерывания раз в 0,5 сек.
I_VECTORS EQU 0FFFFH ; Вектора прерываний в ПЗУ
MAIN EQU ROM_ORIG ; Стартовый адрес программы в ПЗУ
BTLOAD EQU 011H ; Частые прерывания (не 1 сек)
I_VECTORS EQU 0FFFFH ; Вектора прерываний в ПЗУ
MAIN EQU ROM_ORIG ; Стартовый адрес программы в ПЗУ
BTLOAD EQU 035H ; Прерывания раз в 0,5 сек.
; Определения для АЦП на базе модуля TIMER PORT
TPCTL EQU 04BH ;Рег.управ.модулем TIMER PORT (04BH)
TPSSEL0 EQU 040H ;Источник тактирования:0=CMP,
;1=ACLK (Бит 6 в TPCTL)
ENB EQU 020 ;Контроль сигнала EN1 в TPCNT1
;1(+ENA=1)=CMP (Бит 5 в TPCTL)
ENA EQU 010H ;Контроль сигнала EN1 в TPCNT1
;1(+ENB=1)=CMP (Бит 4 в TPCTL)
EN1 EQU 008H ;Сигнал ENABLE в TPCNT1 только
;для чтения (Бит 3 в TPCTL)
RC2F EQU 004H ;Флаг перепол.TPCNT2(Бит2в TPCTL)
EN1FG EQU 001H ;Флаг EN1 (Бит 0 в TPCTL)
TPIE EQU 004H ;Разреш.прерыв.от TIMER(Бит3вIE2)
TPCNT1 EQU 04CH ;Младший байт счётчика
TPCNT2 EQU 04DH ;Старший байт счётчика
TP EQU 04EH ;Регистр данных TP(0–5=Выход TP,
;6=CPON,7=B16=2×8 Бит или1×16Бит
B16 EQU 080H ;Раздел.тайм-ы(0)или один16-бит(1)
CPO EQU 040H ;Компаратор выкл (0) / вкл (1)
TPDMAX EQU 002H ;бит вых.TPD.MAX(2=Бит1=TPD.1)
TPE EQU 04FH ;Рег.разреш.выходов 0–5=биты разреш
MSTACK EQU 03D2H ;1-е слово стека результата
PRESET EQU 0E8H ;Предустановка TPCNT2 для заряда С
;счёт останавливается при
;переполнении TPCNT2, значение
;рассчитано на постоянную врем.6RC
; Определения управляющих регистров
IE1 EQU 0H ;Регистр разрешения прерываний 1
IE2 EQU 01H ;Регистр разрешения прерываний 2
P01IE EQU 08H ;Разрешение прерываний отP0.1в IE1
BTIE EQU 080H ;Разреш.прерыв.от BASIC TIMER в IE2
IFG1 EQU 02H ;Регистр флагов прерываний 1
IFG2 EQU 03H ;Регистр флагов прерываний 2
LCDCTL EQU 030H ;Регистр управления ЖКИ
LCDM1 EQU 031H ;Первая ячейка памяти ЖКИ
BTCTL EQU 040H ;Регистр управления BASIC TIMER
BTCNT1 EQU 0046H ;Счётчик 1 BASIC TIMER
BTCNT2 EQU 0047H ;Счётчик 2 BASIC TIMER
WDTCTL EQU 0120H ;Регистр управления WATCHDOG
WDTHOLD EQU 080H ;Маска останова WATCHDOG
WDT_KEY EQU 05A00H ;Ключ доступа к WATCHDOG
WDT_STOP EQU 05A80H ;WATCHDOG маска + ключ
GIE SET 8H ;Общее разрешение прерываний
CPUOFF SET 10H ;Бит выключения CPU
OSCOFF SET 20H ;Бит выключения генератора
SCG0 SET 40H ;Контр.сист.тактирования,бит0
SCG1 SET 80H ;Контр.сист.тактирования,бит1
LPM0 SET CPUOFF ;Биты установки режима LPM0
LPM1 SET SCG0+CPUOFF ;Биты установки режима LPM1
LPM2 SET SCG1+CPUOFF ;Биты установки режима LPM2
LPM3 SET SCG1+SCG0+CPUOFF ;Биты установки режима LPM3
LPM4 SET OSCOFF+CPUOFF ;Биты установки режима LPM4
; Служебные регистры для вычисления сопротивления датчика
MLTPLR_HW EQU R5
MRESLT_HW EQU R8
MRESLT_LW EQU R9
RESET MOV #STACK,SP ;Инициализация указателя стека
SETUPINT MOV.B #P01IE,Разреш.P0.1/UART для S232
MOV.B #BTIE+TPIE,Разреш.прерыв.от B.TIMER,IFG1 ; Очистить все флаги прерываний
EINT ;Разрешить прерывания
SETUPWDT MOV #WDT_STOP, Остановить WATCHDOG TIMER
SETUPLCD MOV.B #0FFH, ЖКИ STK, все сегменты, 4MUX
SETUPBT MOV.B #BTLOAD, Загруз.част.прерыв в BASIC TIMER
CLR.B Очистить счётчик BT 1
CLR.B Очистить счётчик BT 2
CLEARLCD MOV #15,R6 ; Очистить 15 ячеек памяти ЖКИ
CLEAR1 MOV.B #0,LCDM1–1(R6) ; записав туда «0»
DEC R6 ; Вся памяти ЖКИ очищена?
JNZ CLEAR1 ; нет, чистим дальше
; Начало основной программы
BEGIN BIS #LPM3,SR ; Установить SR-биты для LPM3
;Подпрограмма измерения с запрещёнными прерываниями. TP.2–.5 не
;используются поэтому переписаны. Используются только TPD.0 Начальная инициализация: Указатель стека = 0, Начало с TPD.1
;16–битный таймер, тактирование от MCLK, CIN разрешает счёт MEASURE PUSH.B #TPDMAX ;Сохранить в стеке для послед.использ.
CLR R8 ;Указатель для стека результата
MEASLOP MOV.B #(TPSSEL0*3)+ENA,TPCNT1 CLK=MCLK, EN1=1
;Конденсатор С заряжается на протяжении t>5нс.Используются выходы N–1
MOV.B #B16+TPDMAX–1,&TPD;один16-бит.счёт,выбор вых. заряда
MOV.B #TPDMAX–1, Разрешить выходы заряда
MOV.B #PRESET, Загрузить время заряда
BIS #CPUOFF,SR ; Режим понижен.потребления
; Запрет.все прерыв.для обеспеч.непрерыв.работы тайм.и разряд конден.
DINT ; Запрет прерываний
CLR.B Очистить младший байт таймера
MOV.B #(TPSSEL0*3)+ENA+ENB,TPCNT1 CLK=MCLK,
; разрешить вход CIN
EINT ; Разрешить прерывания, общий старт
BIS #CPUOFF,SR ; Режим пониженного потребления
; EN=0:Завершение преобразования: 2X8 бит результата в MSTACK
; Сохранить результат в стеке
; Сохранить старший байт результата
L$301 INCD R8 ; Инкремент адреса
JNC MEASLOP ; Если C=1 – завершение
INCD SP ; Убрать старший TPD из стека
; Вычисление сопротивления датчика
;Подпрограмма беззнакового умножения:MSTACK X TEN_K MRESLT_HW/MRESLT_LW
;Использованы рег.MSTACK,TEN_K,MLTPLR_HW,MRESLT_LW, MRESLT_HW, BITTEST
;Подпрограмма беззнакового умножения с накоплением
;(MSTACK X TEN_K) + MRESLT_HW|MRESLT_LW –> MRESLT_HW|MRESLT_LW
MOV #10000,TEN_K ;Загрузить 10,000 десятичное в TEN_K
MPYU CLR MRESLT_LW ; 0 ? LSBS результата
CLR MRESLT_HW ; 0 ? MSBS результата
MACU CLR MLTPLR_HW ; 0 ? MSBS множителя
MOV #1,BITTEST ; Регистр проверки бит
L$002 BIT BITTEST,MSTACK ; Проверить текущий бит
JZ L$01 ; Если «0» ничего не делать
ADD TEN_K,MRESLT_LW ;Если «1»добавить множитель к резул
L$01 RLA TEN_K ; Множитель X 2
RLA BITTEST ; Проверить следующий бит
JNC L$002 ;Если бит в CARRY: завершить
; Подпрограмма беззнакового деления 32–бита на 16-бит
; Использованы регистры (MSTACK+2),MRESLT_LW,RESULT, LPCNTR, MRESLT_HW
; MRESLT_HW MRESLT_LW / (MSTACK+2) RESULT Остаток в MRESLT_HW
; По выходу: CARRY = 0: OK CARRY = 1: Частное > 16 Бит
DIVIDE CLR RESULT ; Очистить RESULT
MOV #17,LPCNTR ; Инициализация счётчика
DIV1 CMP MSTACK+2,MRESLT_HW
DIV2 RLC RESULT
JC RES_2_F ;Ошибка: RESULT > 16 Бит
DEC LPCNTR ; Декремент счётчика
JZ DIV3 ; 0: выход без ошибки
DIV3 CLRC ;Ошибки нет, C = 0
; Перевод сопротивления датчика в градусы Цельсия для отображения RES_2_F
CLR R12 ;Указат.на значение в табл.R
MOV #064H,R13 ;Поместить мин.темп.-1 в индик
JMP FIRST_CMP ;При первом сравн.1 не добав.
CHECK_R INCD R12 ;INC указат.на знач.в таб.cопрот.
DADD #1,R13 ;Десятичный инкремент счётчика
FIRST_CMP CMP RESIS_TAB(R12),RESULT
;Сравнить табличное значение с вычисленным сопротивлением
JNC CHECK_R ;Переход,если R датч.
;по адресу указателя
;Отобразить ”С” и знак «°» на ЖКИ
DISPLAY MOV.B #A+E+F+D,LCDM1+1 ;”С” ? дисплейная память ЖК
MOV.B #A+B+F+D,LCDM1+2 ;” °” (знак градуса)
; Отобразить значение, хранящееся в R13 в формате BCD на ЖКИ
MOV R13,R12 ;Копир.число в виде BCD в R12
MOV #LCDM1+4,R14 ;Младшая цифра в памяти ЖКИ; R14
BIC #0FFF0H,R13 ;Погасить всё,кроме младшей цифры
MOV.B LCD_TAB(R13),0(R14) ; Отпр.мл.цифру в ЖКИ
MOV R12,R13 ; Восстановить значение в R13
RRA R13 ; 4 сдвига
BIC #0FFF0H,R13 ; Погасить всё, кроме млад.цифры
MOV.B LCD_TAB(R13),1(R14) ;Отправить старшую цифру в ЖКИ
JMP BEGIN ; Переход к началу программы
LCD_TAB BYTE A+B+C+D+E+F ; Отображает”0”
.BYTE B+C ; Отображает”1”
.BYTE A+B+D+E+G ; Отображает”2”
.BYTE A+B+C+D+G ; Отображает”3”
.BYTE B+C+F+G ; Отображает”4”
.BYTE A+C+D+F+G ; Отображает”5”
.BYTE A+C+D+E+F+G ; Отображает”6”
.BYTE A+B+C ; Отображает”7”
.BYTE A+B+C+D+E+F+G ; Отображает”8”
.BYTE A+B+C+D+F+G ; Отображает”9”
; Табл.сопротив.30–40 °C. Значения = KОмыX1000–в 3 децимальных цифры
.EVEN ; Выравнивание по чётному адресу
.WORD 12953 ;300C
.WORD 10353 ;400C
.EVEN ; Выравнивание по чётному адресу
.WORD RESET ; PORT0, Биты 2 .. 7
.WORD BTINT ; BASIC TIMER
.WORD RESET ; Нет источника
.WORD RESET ; Нет источника
.WORD RESET ; Нет источника
.WORD TPINT ; TIMER PORT
.WORD RESET ; Нет источника
.WORD RESET ; Нет источника
.WORD RESET ; Нет источника
.WORD RESET ; Нет источника
.WORD RESET ; WATCHDOG/TIMER, Режим таймера
.WORD RESET ; Нет источника
.WORD RESET ; UART
.WORD RESET ; P0.0
.WORD RESET ; NMI, Сбой генератора
.WORD RESET ; POR,Внеш. Reset, WATCHDOG
Информация о работе «Цифровой термометр на микропроцессоре AVR-MEGA 128»
Раздел: Коммуникации и связь
Количество знаков с пробелами: 32312
Количество таблиц: 0
Количество изображений: 8
Похожие работы
. Какие специализированные команды необходимо применять для опроса датчика? 2.3 Запуск и выполнение Скомпилированная программа представляет собой файл типа cof, который прошиваем на микроконтроллер ATmega 128 семейства AVR. Соединяем компоненты рабочей модели прибора, получаем сигнал с температурного датчика, считываем температуру окружающей среды. 3. Список используемой литературы .
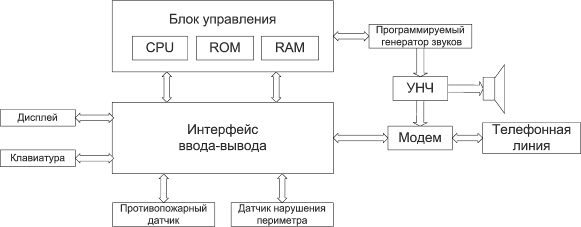

. : следить за загрязненностью и загазованностью производственных помещений, поддержание температурно-влажностного режима. Заключение В данном дипломном проекте, который называется “охранная система с дистанционным управлением” разработано устройство, предназначенное для охраны материальных ценностей от пожара и проникновения злоумышленников. Устройство подключается к персональному компьютеру .
Источник: kazedu.com
3. Технология программирования микроконтроллеров
3.1.1. Программа микроконтроллера –это последовательность команд, каждая из которых представлена в программной памяти одним, двумя или тремя восьмиразрядными двоичными числами, первое из которых–это код операции, а второе и третье число–это либо абсолютный адрес операнда (номер ячейки памяти в которой находится операнд), либо относительный адрес (смещение относительно базового адреса), либо значение константы. В принципе, если знать архитектуру микроконтроллера, иметь алгоритм решаемой задачи и технические средства для записи двоичных чисел в программную память, то микроконтроллер можно запрограммировать, пользуясь только лишь списком машинных кодов команд. Однако, такая технология очень редко применяется на практике, вследствие чрезвычайно высокой трудоемкости программирования на уровне машинных кодов, а также из-за неудобной для человека формы представления результатов работы, что затрудняет поиск и исправление ошибок в программе.
3.1.2. Для повышения производительности и качества программирования микроконтроллеров на уровне системы команд широко используется язык ассемблера, который позволяет сделать исходный текст программы более наглядным и понятным для программиста, чем колонка двоичных чисел. Принципиальное отличие языка ассемблера от всех других языков программирования состоит в том, что этот язык оперирует только командами, которые непосредственно распознает центральный процессор микроконтроллера. По исходному тексту программы, написанной на языке ассемблера, всегда можно определить время ее исполнения и объем программной памяти, необходимый для хранения программы, так как точно известны длина (количество байтов) и время выполнения каждой команды.
Кроме языка ассемблера опытные разработчики применяют языки программирования высокого уровня (например, С51 и PL/M51), которые в данном учебном пособии не рассматриваются. Это сделано по двум причинам. Во-первых, учебное пособие является узко специализированным, и в число его задач не входит повышение эрудиции читателей в вопросах выбора языка программирования. Во-вторых, по мнению автора, для начинающих разработчиков программирование на языке ассемблера значительно полезнее, чем на языках высокого уровня, поскольку дает возможность лучше изучить архитектуру микроконтроллеров.
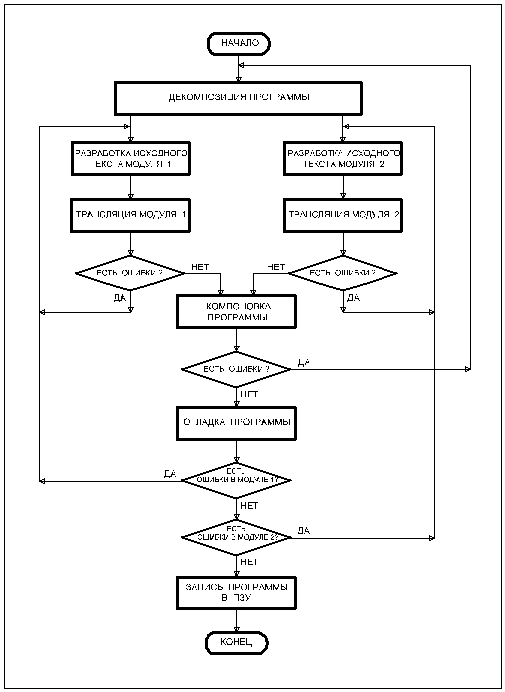
3.1.3. В настоящее время широко применяются технологии программирования микроконтроллеров с помощью персональных компьютеров, позволяющих автоматизировать многие трудоемкие процессы. Ниже рассмотрена одна из компьютерных технологий программирования, при использовании которой разработка программы состоит из следующих основных этапов (рис. 3.1):
1) декомпозиция программы,
2) разработка исходных текстов всех модулей программы с помощью текстового редактора,
3) трансляция исходных текстов модулей программы в объектные модули с помощью программы-транслятора,
4) компоновка объектных модулей вместе с библиотечными модулями в единый загрузочный модуль,
5) отладка программы с помощью эмулятора ПЗУ,
6) запись отлаженной программы в ПЗУ или внутреннюю программную память микроконтроллера с помощью программатора.
Для выполнения перечисленных выше работ достаточно иметь следующие аппаратные и программные средства:
- любой IBM-совместимый персональный компьютер с операционной системойMSDOSверсии 3.30 или более поздней,
- эмулятор ПЗУ,
- программатор ПЗУ,
- текстовый редактор,
- транслятор,
- компоновщик.
Технология программирования, описанная в учебном пособии, не является единственно возможной, однако именно она рекомендуется начинающим разработ-чикам микропроцессорных систем, поскольку эта технология очень проста и не требует дорогостоящих программно-аппаратных средств. Рис. 3.1. Алгоритм программирования МК 3.1.4. Декомпозицией(decomposition) называется разбиение программы на модули (или другие структурные единицы), которые в дальнейшем будут разрабатываться параллельно. Этот этап работы не автоматизирован. Он выполняется на основе общего алгоритма функционирования микропроцессорной системы. Один из модулей программы является главным (в нем содержится программа, запускаемая при сбросе микроконтроллера), а остальные модули обеспечивают работу главного модуля (в них содержатся подпрограммы, которые могут вызываться как из главного, так и из других модулей программы). На этапе декомпозиции разрабатывается структурная схема программы, показывающая взаимосвязи отдельных модулей, а также производится распределение адресного пространства памяти данных между модулями.
Источник: studfile.net
Алгоритм работы микроконтроллера


Управление работой всей системы происходит с помощью микроконтроллера. Последовательность действий микро-ЭВМ задает программа, записанная во внутренней памяти контроллера. Общая схема работы микроконтроллера такова.
При включении, срабатывает встроенный алгоритм сброса микросхемы. Значение всех регистров устанавливается в начальное состояние, запрещается обработка прерываний. Затем начинается выполнение зашитой программы по алгоритму, указанному в Приложении 5. Далее по программе происходит инициализация и установление режимов работы обоих счетчиков Т0 и Т1 посредством записи соответствующих значений в биты специальных регистров TMOD и TCON. Также установление необходимого бита в регистре режима прерываний EI разрешает микроконтроллеру выполнять программу обработки прерывания по переполнению счетчика T0. Запрещается индикация установлением на выводе Р1.0 уровня “1”.
На выводе порта Р3.7 устанавливается значение логической единицы, т.е. формируются первые временные ворота. Затем выполняется программа формирования временной задержки длительностью 1 с. Во время этого интервала счетчики производят подсчет импульсов, поступающих на их входы. Содержимое двухбайтовых регистров Т0 и Т1 увеличивается.
Если при высокой частоте количество импульсов, пришедших на вход счетчика Т0, превысит емкость регистра, то происходит выполнение обработки прерывания по переполнению и содержимое дополнительного регистра инкрементируется. Это позволяет микроконтроллеру произвести подсчет 2 24 импульсов. По прошествии одной секунды, на выводе Р3.7 устанавливается “0” и формирование временных ворот заканчивается. Счетчики прекращают счет. В результате получены значения числа импульсов n и N.
Затем микроконтроллер выполняет операцию деления двоичных чисел n и N. Число импульсов n в общем случае трехбайтное, а N – двухбайтное около 10000dec. Так как в микроконтроллере реализована операция деления более чем восьмибитных чисел, то необходимо применять специальный алгоритм, выполняющий деление. В результате получается число, целая часть которого содержится в регистре R3, а дробная – в регистре R4.
Для получения окончательного результат необходимо умножить это число на коэффициент Fсч=10000.
Полученное значение частоты необходимо привести к виду, годному для вывода на индикаторы.
Результат переводится из двоичной формы в двоичнo‑десятичную и определяется предел частоты, т.е. как будет выводится результат – в герцах или в килогерцах. Выделяется та часть числа, которая будет выведена на семисегментные индикаторы, необходимо получить четыре значащих цифры. Определяется местоположение запятой. Теперь необходимо перевести число из двоично-десятичного кода в код семисегментного индикатора. Это производится при помощи таблицы соответствия, зашитой в памяти микроконтроллера.
Полученные данные нужно вывести на индикатор.
Производится инициализация последовательного порта ввода‑вывода путем записи определенных значений в соответствующие биты специального регистра SCON. Вывод ведется в синхронном режиме последовательным кодом младшими битами вперед.
Запись байта в специальный буфер SBUF приемопередатчика приводит к автоматической перезаписи байта в сдвигающий регистр передатчика и инициирует начало передачи байта. В этом режиме информация и передается и принимается через внешний вывод входа приемника RxD. Передается восемь бит данных.
Через внешний вывод выхода передатчика TxD вдаются импульсы сдвига, которые сопровождают каждый бит. Частота передачи бита информации равна 1/12 частоты резонатора. Таким образом выводится весь результат, который запоминается в сдвиговом регистре DD4.
На выход порта Р1.0 записывается логический ноль, что разрешает вывод информации на индикаторы. Измерение произведено. При желании, микроконтроллер можно перевести в режим пониженного энергопотребления Power Down.
4. Расчёт надежности
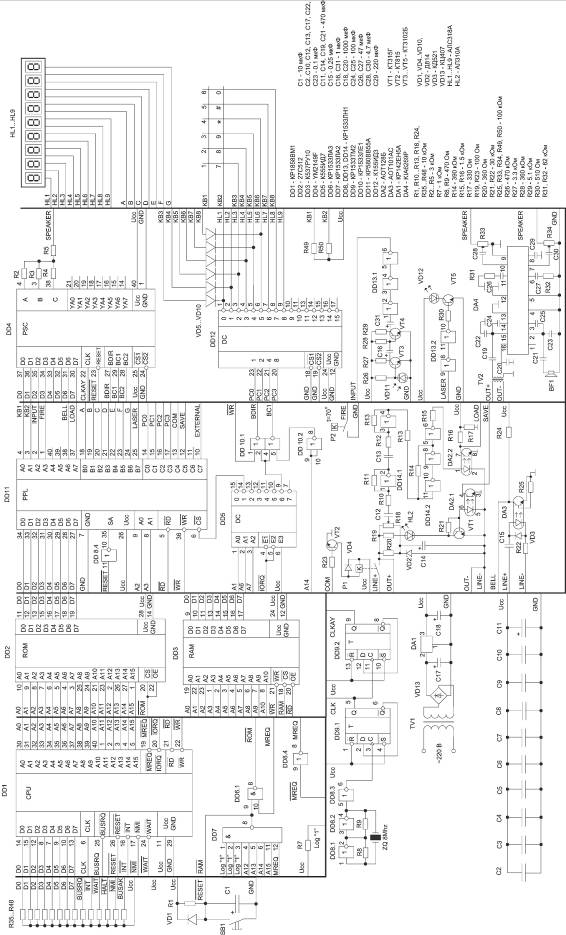
Микросхемы стали основной элементной базой современной РЭА прежде всего благодаря своей высокой надежности. Надежность зависит от многих факторов: совершенства разработки электрической схемы и конструкции, физико-химической совместимости материалов, отработанности и стабильности технологического процесса изготовления, методов контроля качества.
Групповой способ изготовления десятков тысяч микросхем в едином технологическом цикле, в строго контролируемых технологических средах и режимах обеспечивает примерно равную надежность как всех кристаллов в партии микросхем, так и элементов в каждом из кристаллов.
Как известно, одним из основных источников отказов аппаратуры являются межсоединения плат и комплектующих изделий. Внутри микросхемы соединение элементов между собой осуществляется методом осаждения пленок металлов, а соединение элементов с выводами корпуса – методом термокомпрессионной или ультразвуковой микросварки.
Эти методы обеспечивают надежное сцепление с поверхностью кристалла и другими пленками и соединение металлов на молекулярном уровне. Число межсоединений на кристалле в тысячи раз превышает число выводов корпуса микросхем. Для большинства типов микросхем характерно низкое потребление мощности. При малой мощности рассеяния рабочая температура кристалла по сравнению с температурой окружающей среды повышается незначительно, поэтому создаются благоприятные условия для замедления физико-химических процессов, приводящих к отказу.
Применение высоконадежных микросхем не всегда автоматически обеспечивает выпуск столь же надежной аппаратуры. Сохранение надежности микросхем в аппаратуре в значительной степени определяется соблюдением рекомендаций по их конструктивно-технологическому применению, режимам и условиям работы.
Реальный уровень надежности микросхем проявляется лишь при эксплуатации аппаратуры. Часто безотказность микросхем различных серий (их изготавливают на разных заводах) практически одинакова в приборах, изготовленных на одном и том же предприятии-изготовителе РЭА. Однако, как показывает статистика, надежность микросхемы одной и той же серии (одного предприятия) оказывается весьма различной в составе комплектов аппаратуры, изготовленных разными заводами. Это следствие различия технологической культуры производства аппаратуры.
Достижение и поддержание максимальной эксплуатационной надежности микросхем (следовательно, и аппаратуры) существенно зависят от проектирования аппаратуры, подготовки производства и наладки оборудования, квалификации персонала, обработанности технологического процесса изготовления аппаратуры, использования средств защиты микросхем от статического электричества, тепловых и других воздействий.
Свойство электронной аппаратуры выполнять возложенные на нее функции, сохраняя свои эксплуатационные показатели в течение заданного промежутка времени в пределах, установленных в техническом задании или технических условиях, называется надежностью.
Надежность аппаратуры обычно связывается с понятиями работоспособности, безотказности, ремонтопригодности и долговечности.
Под работоспособностью понимается состояние, при котором она способна выполнять возложенные функции с параметрами, установленными требованиями технической документации.
Свойство сохранять работоспособность в течение некоторого времени наработки без вынужденных простоев называется безотказностью.
Поскольку большинство типов электронной аппаратуры эксплуатируется длительное время, многократно включаются и выключаются, то возможные случаи нарушения состояния работоспособности сопровождаются ремонтом. Поэтому надежность аппаратуры оценивается так же ремонтопригодностью. Надежность аппаратуры на ряду со свойствами безотказности и ремонтопригодности определяется так же свойством долговечности – сохранением работоспособности в течение срока эксплуатации.
Показателями долговечности являются технический ресурс и срок службы.
В соответствии с расчетной схемой вероятность безотказной работы системы определяется как произведение вероятностей безотказной работы отдельных элементов:

где, n – количество элементов в схеме;
Pi – вероятность безотказной работы i-го элемента схемы.
Для элементов, используемых в разработанном устройстве из справочных данных статистической интенсивности отказов, следующие величины представлены в таблице 7.1.
| Наименование элементов | Кол-во элементов | Интенсивность отказов |
| Микросхема серии КР531ГГ1 | 1 |  |
| Микросхема серии КР142ЕН5А | 1 |  |
| Микросхема серии AD8055 | 1 |  |
| Микросхема серии К1533ЛА3 | 2 | |
| Микросхема серии AT89C2051 | 1 |  |
| Микросхема серии M5450B7 | 1 |  |
| Диоды | 4 |  |
| Резисторы | 7 |  |
| Конденсаторы | 13 |  |
| Резонаторы | 2 | |
| Паяльные соединения | 416 | |
Тогда общая интенсивность отказов:
λобщ = (1· 3,6 + 1· 3,8 + 1 · 3,8 + 2 · 3,8 + 1 · 3,4 + 1 · 4,0 +

+4· 0,4 + 7· 0,4 + 13 · 3,0 + 2· 0,4 + 416 ·0,4) · 10 =

= 0,9398 · 10
Среднее время наработки на отказ рассчитывается по формуле:

час.
Вероятность безотказной работы прибора рассчитывается по формуле:

,
где, Тk – время контроля (500 ч.).
Вероятность безотказной работы прибора составляет:

Произведенный расчет надежности показала, что проектируемый программно-управляемый частотомер имеет среднее время наработки на отказ 10640,56 часов (по техническому заданию не менее 10000 часов), вероятность безотказной работы 0,95.
5. Требования безопасности
Конструктивное исполнение устройства в соответствии с ГОСТ 12.1.006-87 должно обеспечивать его пожарную безопасность в аварийном режиме и при нарушении правил эксплуатации.
Маркировка устройства должна соответствовать комплекту конструкторской документации и ГОСТ 26828-86.
Маркировка клемм подсоединения должна проводиться в соответствии с электрической принципиальной схемой устройства.
Способ и качество маркировки должны обеспечивать четкость и сохранность ее в течение всего срока службы устройства.
Маркировка потребительской тары должна соответствовать требованиям ГОСТ 26828-86
7. Упаковка устройства
Способ упаковывания устройства, паспорта, памятки, комплекты принадлежностей, подготовка их к упаковыванию, потребительская, транспортная тара и материалы, применяемые при упаковывании, порядок размещения и маркировка должны соответствовать комплекту конструкторской документации и ГОСТ 26828-86. ГОСТ 23170-78. ГОСТ 9.014-78.
БИ, БФ, паспорт с памяткой и комплектом принадлежностей, должны быть помещены в пакеты из полиэтиленовой пленки ГОСТ 10354-82. Края пакетов должны быть заварены.
БИ, БФ, паспорт с памяткой и комплектом принадлежностей в полиэтиленовых пакетах должны быть помещены в потребительскую тару – коробку из картона по ГОСТ 12301-81.
На ящик должна быть наклеена этикетка, выполненная согласно конструкторской документации, внутрь каждого ящика должен быть помещен упаковочный лист, содержащий следующие данные:
— наименование и обозначение устройства;
— количество мест в партии;
— подпись или штамп ответственного за упаковывание.
Транспортная тара внутри должна быть выстлана бумагой битумированной ГОСТ 515-77. Промежутки между потребительской тарой и стенками ящика должна быть заполнены обрезками картона.
Упаковка должна обеспечивать сохранность устройства на весь период транспортирования, а также его хранение в течение установленного срока.
Масса брутто должна быть не более 8 кг.
8. Транспортировка и хранение
В упакованном виде изделие может транспортироваться речным, воздушным, автомобильном железнодорожном видами транспорта.
Транспортирование должно производится в соответствии с требованиями, изложенными в следующих документах: «Правила перевозки грузов», утвержденными Министерством речного флота; «Руководство по грузовым перевозкам на внутренних воздушных линиях», утвержденными Министерством гражданской авиации; «Общие правила перевозки грузов автотранспортом», утвержденными Министерством автомобильного транспорта; «Правила перевозки грузов», утвержденными министерством путей сообщения (МПС).
Транспортирование железнодорожным транспортом должно производиться в крытых вагонах или контейнерах, при этом крепление грузов должно производиться в соответствии с «Техническими условиями погрузки и крепления грузов», утвержденными МПС.
Изделия должны храниться на стеллажах в закрытых вентилируемых помещениях при температуре окружающей среды от +15 °С до +40 °С и относительной влажности до 80 % и отсутствии в окружающей среде агрессивных примесей.
1. «Дипломное проектирование. Методические указания для студентов специальности Информационно-измерительная техника и технология». МГОУ, 2004 год.
2. Контрольно-измерительная техника. Под ред. Б.И. Горбунова. — М.: Высшая школа, 1987 г.
3. Хромой Б.П., Моисеев Ю.Г. Электрорадиоизмерения: Учебник для техникумов. – М.: Радио и связь, 1985 г.
4. Ермолаев Р.С. Цифровые измерительные приборы. Л., «Энергия», 1981г.
5. Попов В.С. Электрические измерения. Учебник для техникумов. – М.: «Энергия», 1984 г.
Источник: megaobuchalka.ru