
DOC2 – программа расчета однолинейных схем низкого и среднего напряжения
Представляю вашему вниманию бесплатную программу DOC2 от компании «АББ». DOC2 — это программа предназначена для создания и расчета однолинейных схем низкого и среднего напряжения, для выбора коммутационной и защитной аппаратуры, а также для настройки, проверки и селективности защит.
При установке программного обеспечения DOC2 дополнительно устанавливаются вспомогательные модули:
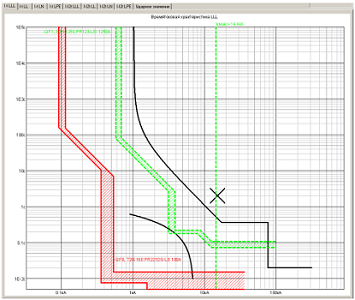
- Curves – позволяет работать с время-токовыми характеристиками устройств представленных на схеме, настраивать термомагнитные и электронные расцепители защиты, реализовать селективность устройств низкого и среднего напряжения, проверять защиту кабелей.
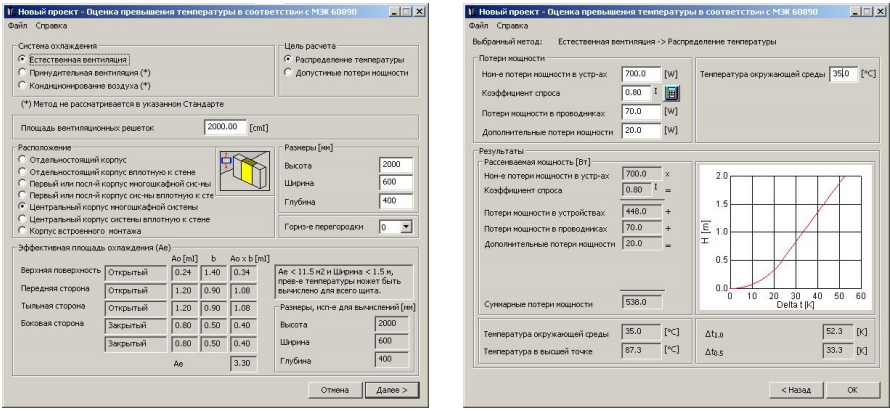
- Temperature — rise assessment according to IEC 60890 – позволяет выполнить оценку распределения температуры, согласно IEC 60890, уже на ранних стадиях проектирования электроустановки.
Подделка ДИФ ABB: как отличить подделку от оригинала!
Для запуска дополнительных модулей «Curves» и «Temperature — rise assessment according to IEC 60890» нужно кликнуть по вкладке «Tools».
Данное программное обеспечение будет полезно тем специалистам (проектировщикам, наладчикам, менеджерам по продажам), которые занимаются расчетами электроустановок или их частью.
Основные функции программы:
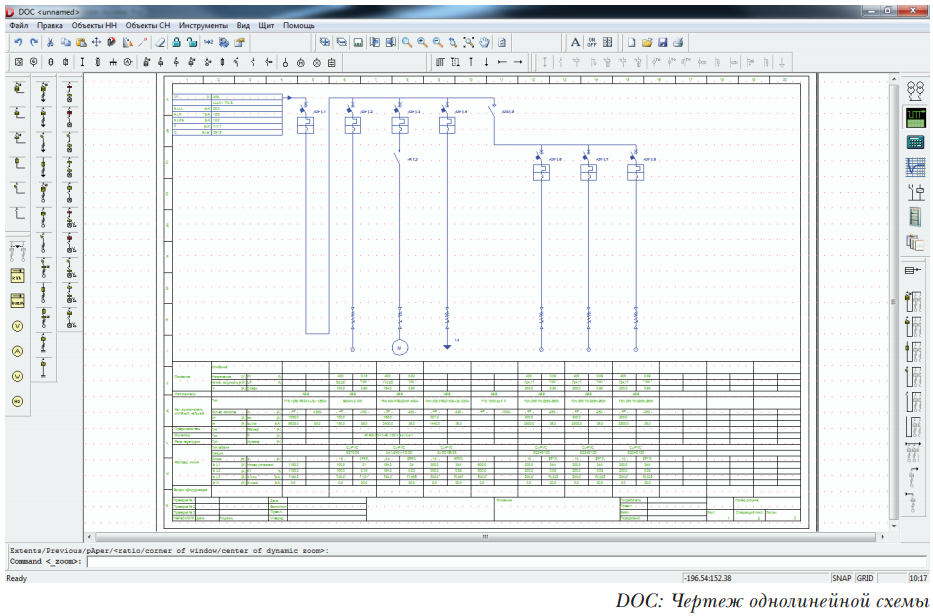
1. Создание однолинейных электрических схем на низкое и среднее напряжение (позволяет строить смешанные и кольцевые схемы).
2. Расчет минимального и максимального значения токов короткого замыкания с учётом подпитки от двигателей или без нее, для симметричных и несимметричных замыканий, при различных временах. DOC2 применяет несколько методов расчёта:
- IEC 60909 (Международный стандарт);
- IEC 61363 (Морской стандарт);
- NFC 15-100 (Французский стандарт);
- метод симметричных составляющих.
3. Выбор кабелей — задав мощность, потребляемую нагрузками и двигателями, DOC2 может подобрать кабель итерационным процессом, приводящим к оптимизации сечения и расчёта распределения токов. DOC2 применяет несколько методов расчёта:
- IEC 60364 (ГОСТ Р 50571 Электроустановки зданий)
- CEI 64-8
- VDE 298
- NFC 15-100
- UNE 20460
- IEC 60092
4. Расчет токов в отходящих линиях и падения напряжения.
5. Выбор коммутационной и защитной аппаратуры. Расчёт приводит к автоматическому подбору всех устройств, присутствующих на схеме. Если с технической точки зрения может быть подобрано более одного подходящего продукта, DOC2 предлагает самый дешёвый. Возможно изменить решение, предложенное программой DOC2 и заблокировать выбор пользователя благодаря замкам, представленным во всех окнах выбор.
ABB-free@home. Все о системе домшней автоматизации.
6. Проверка теплового режима внутри шкафа.
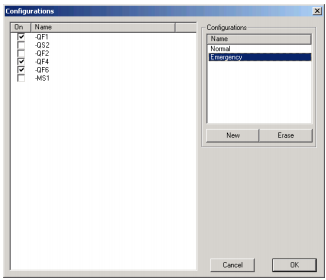
7. Управление конфигурациями. В программе DOC2 возможно моделировать различные режимы для электроустановок, определяя разомкнутое/замкнутое состояние устройств коммутации и защиты. Расчёт производится по наихудшим условиям.
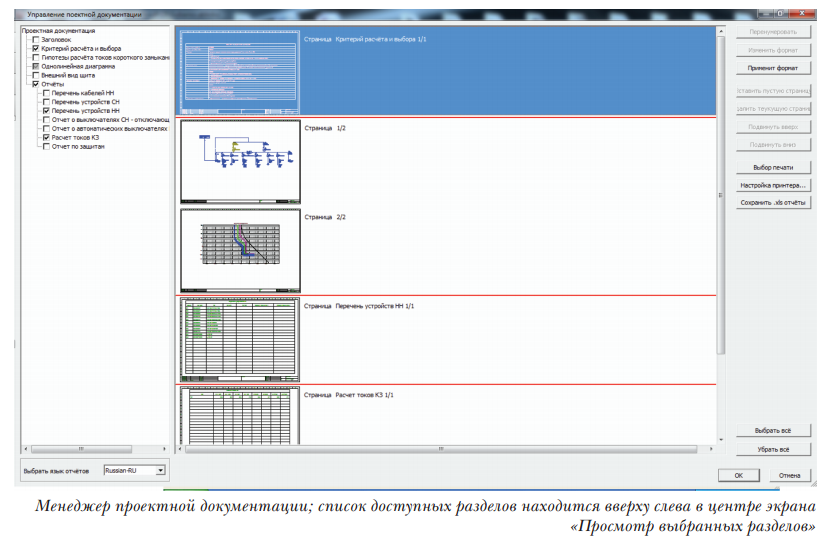
8. Создание проектной документации. Доступен экспорт в файл MS Eхcel.
DOC2 имеет ряд улучшений и новых возможностей по сравнению с предыдущим поколением DOCWin3:
- наличие обновлённых баз данных (Tmax XT, Smissline, MS, реле перегрузки и т.д.);
- база данных устройств среднего напряжения;
- динамическое масштабирование вида;
- построение схем с помощью готовых макросов;
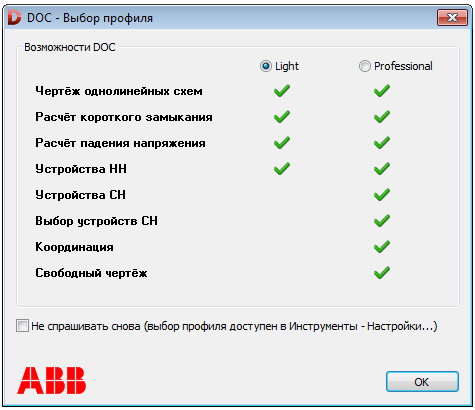
- 2 профиля для разных категорий пользователей (упрощенная и профессиональная);
- создание заказных спецификаций по рассчитанному проекту с помощью программы CAT7;
- конфигурация НКУ (недоступно для России и стран СНГ).
Программа DOC2 поддерживается на 16 языках: Русский, Украинский, English, German, French, Spanish, Portuguese, Danish, Turkish, Chinese, Polish, Hungarian, Czech, Italian, Bulgarian, Finnish.
В программе DOC2 есть возможность выбора между двумя профилями. В зависимости от нужд и опыта пользователя можно рекомендовать использовать профиль Light, который скрывает дополнительные и сложные функции.
DOC2 Light подходит для:
- первого знакомства с программой, неопытных пользователей DOC2;
- сборщиков, когда необходим простой инструмент для построения и проверки небольших сетей;
DOC2 Professional предназначен для:
- опытных пользователей DOC2;
- заказчиков, работающих с промышленными применениями;
- инжиниринговых компаний — OEM с точки зрения мощного инструмента расчёта и проектирования.
Поддержка пользователей программы DOC2
- программа DOC2.
- презентация программы DOC2.
- подробная инструкция на русском языке по работе с программой DOC2 на 171 стр.
- кладовая программных обеспечений SACE, где вы сможете скачать любую интересующую Вас программу от компании «АББ», кликнув по кнопке «Загрузить».
Источник: raschet.info
Управляем ABB роботами с помощью FlexPendant
Просьба: если вы здесь увидели какие-то ошибки или неточности то просьба сообщить об этом в комментариях или написать мне. Если вы хорошо разбираетесь в робототехникe или очень хорошо знакомы с RobotStudio свяжитесь со мной 🙂
ABB роботы
Все роботы компании ABB это манипуляторы, которые используются в основном на производствах, в лабораториях или на складах. В каталоге компании можно встретить такие типы роботов как: SCARA роботы, DELTA роботы, шарнирные роботы, коллабративные роботы и покрасочные роботы.
Интересный факт: к ABB обращаются множество клиентов чтобы использовать роботов для покраски. ABB пришлось сделать отдельную линейку роботов.
Это было небольшое вступление, идем дальше.
ABB RobotStudio, FlexPendant, IRC5

Для программирования роботов компании ABB используется их фирменное программное обеспечение RobotStudio. Программа платная и стоит целых 1500$/год за стандартный комплект. За каждое дополнение придется доплачивать отдельно, хотя стоит сказать, что ABB иногда проводят акции или предоставляют своим клиентам специальные предложения.
Но есть и хорошая новость, — это пробный период. Пробный период доступен всего 30 дней, после чего основной функционал RobotStudio будет заблокирован. Стоить еще сказать, что переустановка RobotStudio или установка на виртуальную машину не поможет, в этом случае «программа» не даст возможности выбрать пробную версию.
Любой робот ABB это просто корпус, сервомоторы и датчики (грубо говоря) и нуждается в том, чтобы им кто-то управлял. В этом случае нас спасает контроллер компании ABB — IRC5.

В комплекте с контроллером поставляется пульт управления роботом ABB FlexPendant. Он напрямую подключается к контроллерам (например IRC5). Точно такой же пульт в виде симуляции можно использовать в RobotStudio. Программу для роботов можно писать в RobotStudio (через RAPID редактор) или через FlexPendant. В этой статье рассмотрим именно базу для FlexPendant.

Создаем робота в RobotStudio
Итак, про RobotStudio поговорили, про IRC5 поговорили, о FlexPendant узнали. Теперь мы переходим к практике. Запускаем RobotStudio:
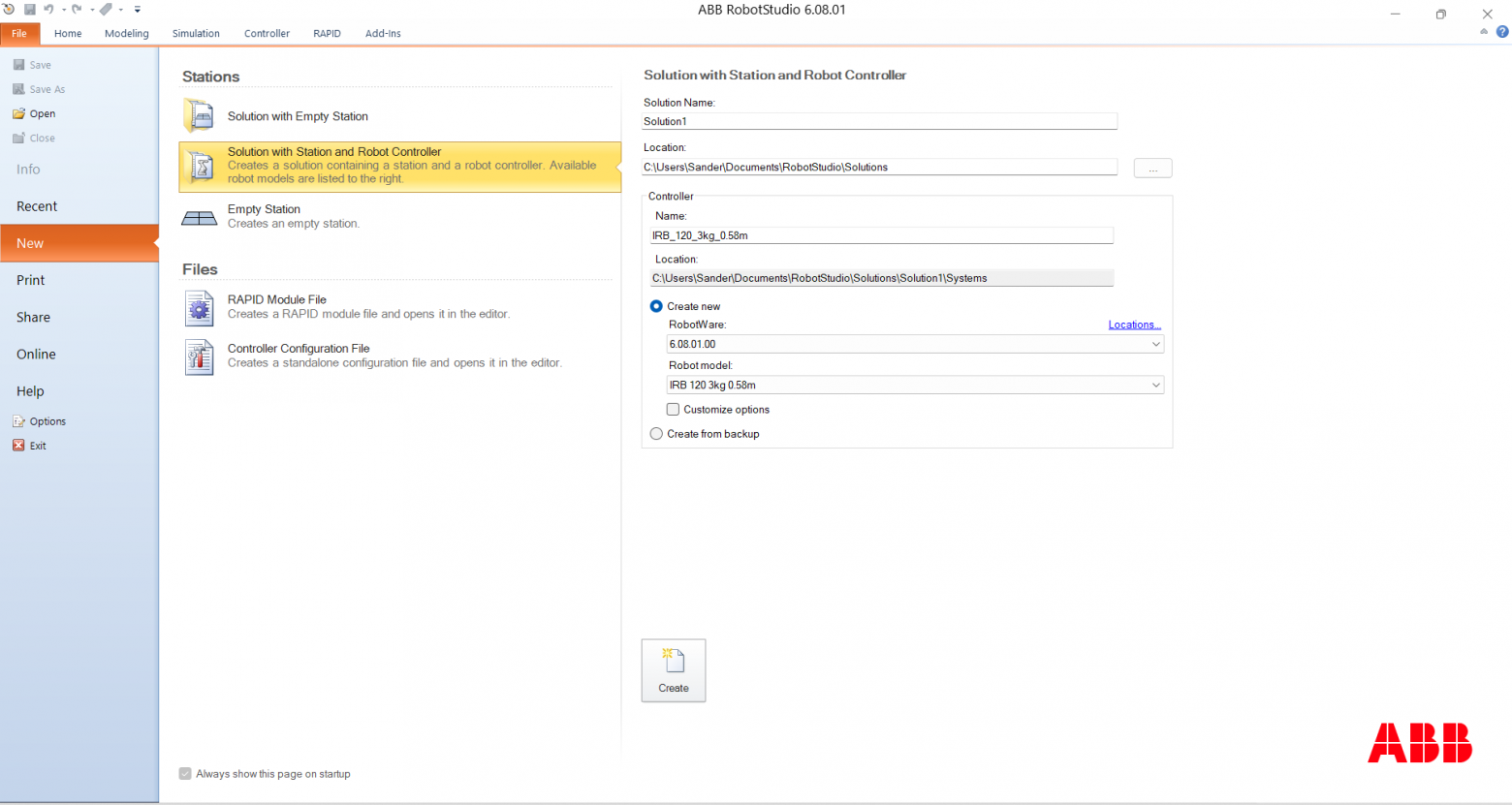
Выбираем Solution with Station and Robot Controller (создать робота, со станцией управления и контроллером). Заполняем необходимые поля, задаем имя для нашего проекта.
Обратите внимание, чтобы в Location не было слишком длинного пути до файлов, иначе RobotStudio не даст создать проект и будет показывать ошибки
Далее переходим к первым настройкам самого робота: RobotWare я выберу 6 версию (RobotWare — ОС для контроллера IRC5). В Robot model выбираем необходимого нам робота и оставляем пустым Customize options, так как дополнительные настройки нам пока не нужны.
При выборе разных версий (например 7) некоторые роботы пропадут из списка доступных. Это связанно с тем, что не все роботы поддерживают более новый RobotWare. В реальности ABB создает поддержку для новых версий, однако в RobotStudio не успевает быстро появится поддержка
После создания проекта программа может попросить нас выбрать более точную модель робота. Чтобы понять какой робот нам необходим нужно залезть в каталог роботов ABB и посмотреть на техническую документацию.
Робот создан! В данной статьи я не буду рассказывать подробно как ориентироваться в интерфейсе. Можно посмотреть это видео, где показывается как управлять роботом.
Запускаем FlexPendant и управление через пульт
Итак. В RobotStudio мы выбираем вкладку Controller и ищем FlexPendant с изображением нашего пульта. После этого выбираем Virtual FlexPendant.

После чего перед вами в виде отдельного окна появится симуляция пульта FlexPendant, это окно независимо от RobotStudio и можно например переместить на второй монитор, чтобы на первом видеть RobotStudio.
Давайте подвигаем нашего робота. Для этого необходимо в Flexpendant открыть меню (левый верхний угол) и выбрать страницу Jogging.

Перед нами откроется страница для управления режимами, выбором степенями свободы робота и другой информации: нагрузка, рабочий объект, инструмент.
Окно Position показывает нам каждое звено и под каким углом оно в данный момент находится (0 — null позиция, она необходима для калибровки).
Окно Joystick directions показывает нам как нужно сам боковой джойстик повернуть чтобы задействовать необходимое нам звено.
Если мы сейчас попробуем подвигать нашего робота, то у нас ничего не получится. А все потому что, так как этот пульт в точности копирует настоящий нам необходимо переключиться на «ручной режим» управления. Для этого необходимо возле самого джойстика найти маленькое изображение контроллера IRC5 и нажать на него. После чего необходимо выбрать среднее положение «ключа».

Теперь необходимо включить сами сервомоторы. Для этого нажимаем на Enable и Hold To Run. Теперь попробуйте подвигать джойстиком и посмотрите как начинает себя вести робот.

Кликнув на Motion mode: Axis 1 — 3. мы можем выбрать какими степенями свободы мы хотим управлять. Кликнув на ROB_1 (это идентификатор нашего робота в RobotWare) мы можем открыть дополнительное окно настроек нашего робота. Тамже можно настраивать скорость движения, углы, возрастающую скорость и многое другое.


Выбрав самое верхнее изображение нашего робота мы увидим тот же самый Motion mode однако в добавок у нас будет возможность выбора системы координат и рабочего инструмента.

Создаем программу для ABB робота с помощью FlexPendant
Давайте в завершении создадим простую программу с 2 точками.
- Запустить RobotStudio ✔
- Создать робота ✔
- Запустить FlexPendant ✔
- Открыть редактор программы
- Создать программу
- Обучить робота точкам
Точки — это наши пункты в разных системах координат для нашего робота. С помощью указаний этих пунктов и вида движения мы задаем роботу жесткий сценарий по которому он будет следовать. Например следовать дугой от точки А к точки Б, или следовать к точки А остановиться в точки Б и повернуть обратно.
Давайте перейдем к практике:
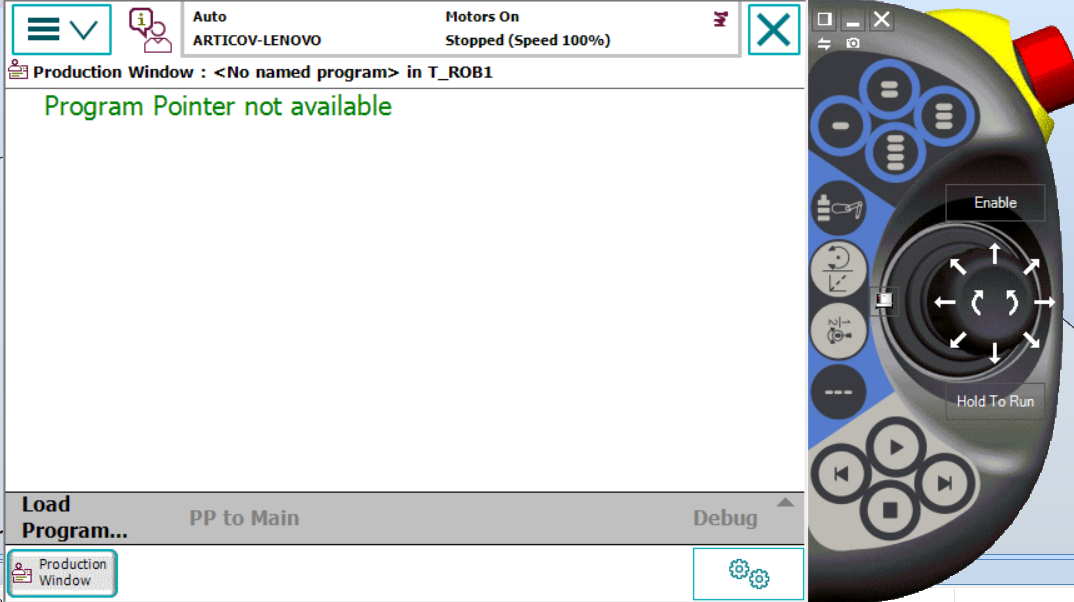
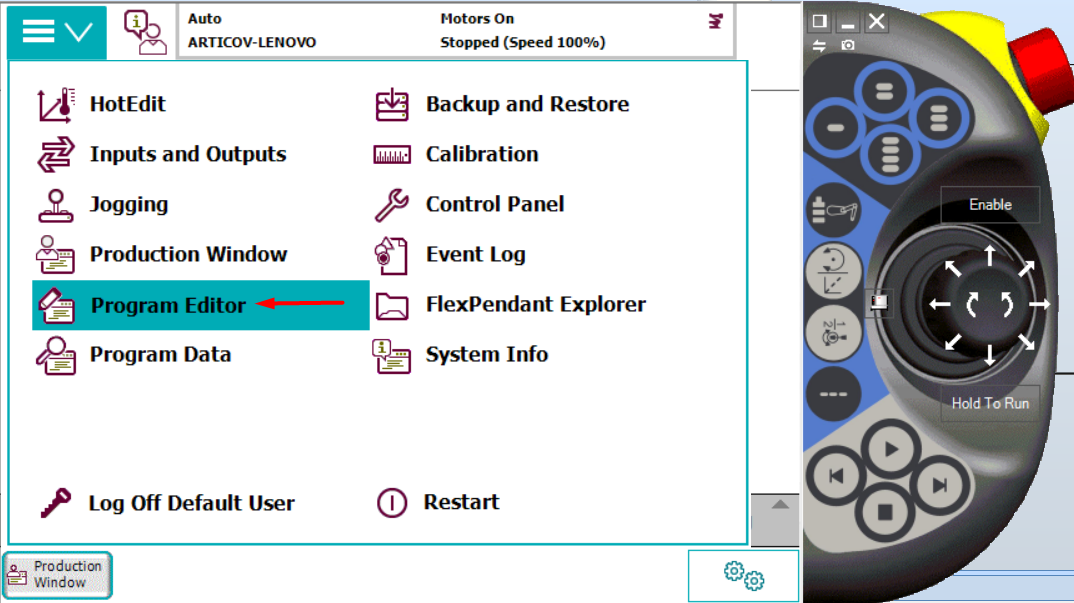
Находим в меню Program Editor. Именно там мы будем создавать нашу программу.

Если программы до этого не было, то пульт предложит создать новую программу с нуля. Мы соглашаемся с этим и попадаем в редактор. Если вы видите следующий код, то все сделано было правильно.
Ниже код представлен на языке программирования RAPID.
MODULE MainModule PROC main() ENDPROC ENDMODULE
ВАЖНО: Чтобы начать создавать программу пульт должен быть переведен в «ручной режим» работы и при необходимости должны быть включены моторы для передвижения робота
Теперь нам необходимо создать для робота первую точку. Пусть это будет его текущая позиция и назовем её «домашней». Для этого прожимаем на Add Instruction и сбоку появится окно с командами, где мы должны выбрать какую инструкцию добавить. Я добавлю MoveL. MoveL — это прямолинейное движение.
Это значит, что робот к ЭТОЙ точке будет двигаться с помощью команды прямолинейного движения MoveL и никак иначе.
После того как создана первая точка необходимо создать еще одну. Попробуйте подвигать робота с помощью FlexPendant и задайте с помощью инструкции MoveL вторую точку.

Итак. Две точки созданы и при необходимости эти инструкции можно дополнительно настроить. Нужно кликнуть по символу звездочки и мы попадем в настройки нашей инструкции
В меню настроек инструкции мы можем добавить «особое имя» для нашей точки, для этого во вкладке Data выбираем функцию new и после чего указываем имя для нашей точки
Советую всегда указывать имя для точек, ибо по дефолту пульт задает им значение Target_N или P_N (где N — номер точки) и потом очень трудно определить какая именно это точка и куда она ведет.


Обратите внимание, что имя должно быть уникальным и больше нигде не повторяться.
Помимо имени точки мы еще можем управлять такими настройками как скорость движения до точки (v1000), точность угла (z50) и какой рабочий инструмент будет использоваться (tool0). Чтобы изменить эти параметры необходимо на них кликнуть и выбрать новые.
Изменение положения точки
С помощью функции Modify position мы можем изменить положение уже созданной точки. Например создав точку Target_10 мы поняли, что она должна быть на 1 сантиметр левее, то мы сначала двигаем робота левее куда нам необходимо и после чего используем Modify position
Запускаем программу в FlexPendant
Наша простая программа создана и теперь мы хотим проверить как она работает. Для этого мы будем использовать встроенный дебагер. Нажав на кнопку Debug нам открывается меню выбора дебага. Что есть что:
- PP to Main -робот будет выполнять программу от самого начала до самого конца. Весь MODULE
- PP to Routine — робот будет выполнять программу только в определенной области PROC #имя
- PP to Cursor — робот будет выполнять команду, на которую указывает стрелка возле номера строки
Остальные функции я не так часто использую, но все же расскажу о них:
Curstor to PP — переводим стрелку на нужную нам строку
Go to position — робот будет двигаться на определенную позицию (точку)
Check Programm — пульт проверит нашу программу
Call Routine — вызвать PROC
View Value — посмотреть данные (переменные, сигналы и т.д.)
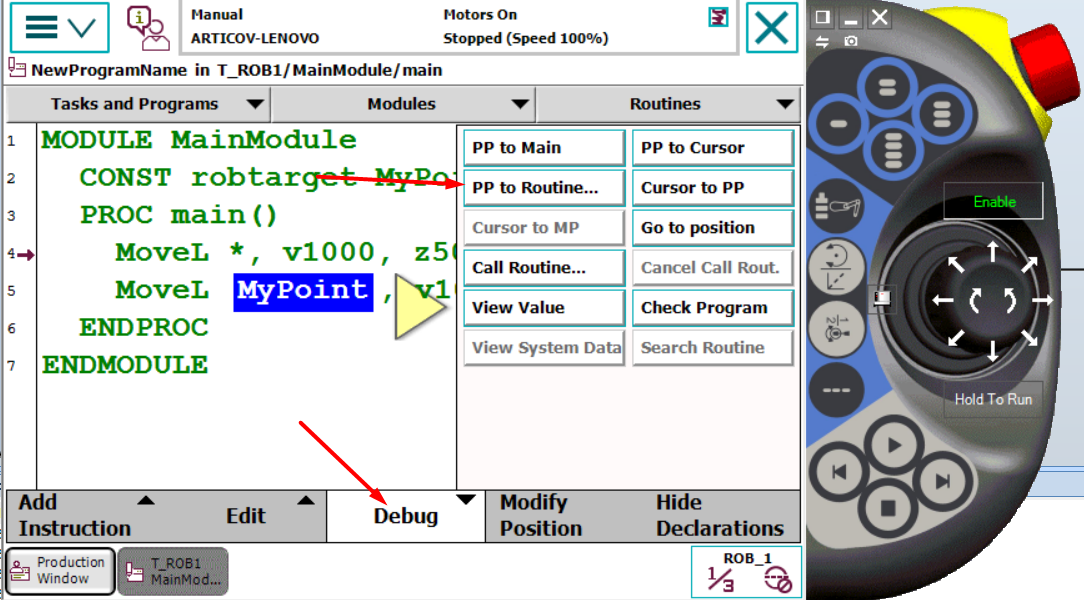
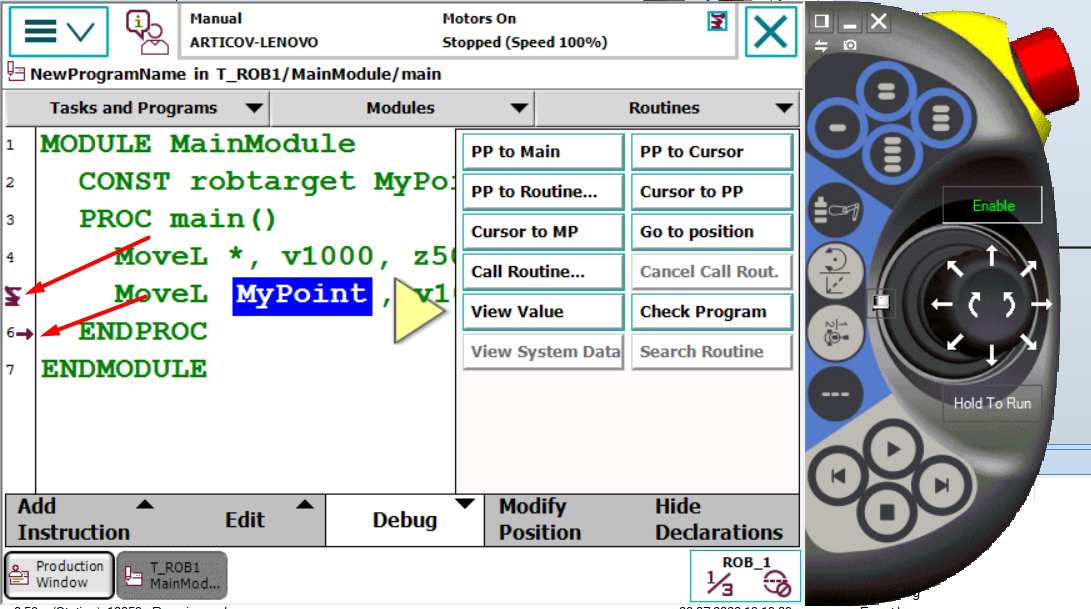
Мы выбираем PP to Routine чтобы проверить как будет работать наша рутина main. После этого на пульте мы можем запустить нашу программу использую следующее управление:
Стрелка play — мы запускаем программу и она будет от начала до конца автоматически исполняться
Стрелка «перемотки» вперед — мы запускаем программу шаг за шагом (например нажав первый раз робот пойдет к точке А и будет ждать дальше разрешения на движение к точке Б)
Стрелка «перемотки» назад обратное стрелки вперед. Мы возвращаемся на шаг назад в программе.
Квадратик — кнопка STOP. Программа завершается и робот уходит в режим ожидания (Stand By)

Дебагер позволяет отслеживать на какой строчке кода находится робот и каким будет его следующим шагом
Всё! Мы научились с помощью FlexPendant и RobotStudio управлять роботами ABB (на самом деле это только базовые навыки правильного «пользования» всем этим. Здесь присутствует очень много функционала, а значит и подводных камней тоже не мало. Здесь я постарался представить представление как работать с этим)
Знаю, возможно этого материала полным полно в Интернете и на ютубе, но здесь я не видел чтобы развивали эту тему. В моей стране не сильно развита робототехника и в «нашем» русском сообществе не с кем поговорить на эту тему, поэтому было бы классно найти единомышленников здесь и узнать что-то новое для себя и поделиться чем-нибудь.
А так, надеюсь что всем вам понравилось и прошу прощения за свою грамматику! Это была моя первая статья и в будущем я хочу больше развивать тему RobotStudio и как там создавать различные решения и как обучать роботов. Жду вашего мнения и впечатлений в комментариях,
Источник: temofeev.ru
ABB Wizard Easy Programming
25 июня 2020 года компания ABB Group представила программу Wizard Easy Programming.
Программа Wizard Easy Programming от ABB позволяет начинающим специалистам по робототехнике без специального обучения устанавливать, программировать и использовать роботов, делая их более доступными для решения задач по автоматизации процессов.
Wizard Easy Programming – это метод графического программирования, который позволяет пользователям быстро создавать прикладные роботизированные программы для однорукого коллаборативного робота YuMi от компании ABB, не имея специального обучения.


Это простое ПО построено на концепции Blockly, метода визуального кодирования с открытым исходным кодом, который представляет язык программирования или код как взаимосвязанные блоки. Используя этот упрощенный подход, программа позволяет пользователям программировать и использовать робот YuMi с одним манипулятором без предварительного знания какого-либо языка программирования. Пользователь может просто перетащить мышкой эти функции на пульт FlexPendant, сразу увидеть результат и настроить действия робота за несколько секунд.
Благодаря возможностям Wizard простота программирования делает использование робота YuMi с одним манипулятором простым, как никогда. Программное обеспечение включает в себя основные робототехнические функции, такие как «переместить», «взять» и «вакуум», охватывающие широкий спектр стандартных задач для робота. Есть также функции обработки ошибок, позволяющие начинающим программистам разобрать и устранить погрешности, например, столкновения. Упрощая обычно сложное программирование, связанное с обработкой ошибок, Easy Programming Wizard может помочь любому пользователю разработать высокоэффективные программы для роботов.
– отметила Энди Чжан, глобальный менеджер по коллаборативной робототехнике ABB
В отличие от других типов программного обеспечения, Easy Programming Wizard в реальном времени преобразуется в язык программирования RAPID от компании ABB, что дает Wizard Easy Programming преимущество поддержки расширенного функционала робота. Сложное программирование робота, такое как задачи по сборку, может быть выполнено опытными робототехниками, а затем конвертировано в Wizard Easy Programming для начинающих специалистов для использования.
Wizard Easy Programming доступен с марта 2020 года в виде предустановленного приложения на устройстве FlexPendant для всех роботов YuMi с одним манипулятором. Программное обеспечение для простого программирования Wizard распространяется бесплатно, программное обеспечение смогут также получить существующие пользователи YuMi в виде бесплатной надстройки, установив ее на FlexPendant через RobotStudio.
Робототехника
- Роботы (робототехника)
- Робототехника (мировой рынок)
- Обзор: Российский рынок промышленной робототехники 2019
- Карта российского рынка промышленной робототехники
- Промышленные роботы в России
- Каталог систем и проектовРоботы Промышленные
- Топ-30 интеграторов промышленных роботов в России
- Карта российского рынка промышленной робототехники: 4 ключевых сегмента, 170 компаний
- Технологические тенденции развития промышленных роботов
- В промышленности, медицине, боевые (Кибервойны)
- Сервисные роботы
- Каталог систем и проектовРоботы Сервисные
- Collaborative robot, cobot (Коллаборативный робот, кобот)
- IoT — IIoT — Цифровой двойник (Digital Twin)
- Компьютерное зрение (машинное зрение)
- Компьютерное зрение: технологии, рынок, перспективы
- Как роботы заменяют людей
- Секс-роботы
- Роботы-пылесосы
- Искусственный интеллект (ИИ, Artificial intelligence, AI)
- Обзор: Искусственный интеллект 2018
- Искусственный интеллект (рынок России)
- Искусственный интеллект (мировой рынок)
- Искусственный интеллект (рынок Украины)
- В банках, медицине, радиологии, ритейле, ВПК, производственной сфере, образовании, Автопилот, транспорте, логистике, спорте, СМИ и литература, видео (DeepFake, FakeApp), музыке
- Национальная стратегия развития искусственного интеллекта
- Национальная Ассоциация участников рынка робототехники (НАУРР)
- Российская ассоциация искусственного интеллекта
- Национальный центр развития технологий и базовых элементов робототехники
- Международный Центр по робототехнике (IRC) на базе НИТУ МИСиС
- Машинное обучение, Вредоносное машинное обучение, Разметка данных (data labeling)
- RPA — Роботизированная автоматизация процессов
- Видеоаналитика (машинное зрение)
- Машинный интеллект
- Когнитивный компьютинг
- Наука о данных (Data Science)
- DataLake (Озеро данных)
- BigData
- Нейросети
- Чатботы
- Умные колонки Голосовые помощники
- Безэкипажное судовождение (БЭС)
- Автопилот (беспилотный автомобиль)
- Беспилотные грузовики
- Беспилотные грузовики в России
- В мире и России
- Летающие автомобили
- Электромобили
- Подводные роботы
- Беспилотный летательный аппарат (дрон, БПЛА)
Источник: www.tadviser.ru
Управляем ABB роботами с помощью FlexPendant
Просьба: если вы здесь увидели какие-то ошибки или неточности то просьба сообщить об этом в комментариях или написать мне. Если вы хорошо разбираетесь в робототехникe или очень хорошо знакомы с RobotStudio свяжитесь со мной 🙂
ABB роботы
Все роботы компании ABB это манипуляторы, которые используются в основном на производствах, в лабораториях или на складах. В каталоге компании [ссылка удалена мод.] можно встретить такие типы роботов как: SCARA роботы, DELTA роботы, коллабративные роботы (коботы), индустриальные манипуляторы (5-6 осевые)
Интересный факт: к ABB обращаются множество клиентов чтобы использовать роботов для покраски. ABB пришлось сделать отдельную линейку роботов.
Это было небольшое вступление, идем дальше.
ABB RobotStudio, FlexPendant, IRC5
Для программирования роботов компании ABB используется их фирменное программное обеспечение RobotStudio. Программа платная и стоит целых 1500$/год за стандартный комплект. За каждое дополнение придется доплачивать отдельно, хотя стоит сказать, что ABB иногда проводят акции или предоставляют своим клиентам специальные предложения.
Но есть и хорошая новость, — это пробный период. Пробный период доступен всего 30 дней, после чего основной функционал RobotStudio будет заблокирован. Стоить еще сказать, что переустановка RobotStudio или установка на виртуальную машину не поможет, в этом случае «программа» не даст возможности выбрать пробную версию.
Любой робот ABB это просто корпус, сервомоторы и датчики (грубо говоря) и нуждается в том, чтобы им кто-то управлял. В этом случае нас спасает контроллер компании ABB — IRC5.
В комплекте с контроллером поставляется пульт управления роботом ABB FlexPendant. Он напрямую подключается к контроллерам (например IRC5). Точно такой же пульт в виде симуляции можно использовать в RobotStudio. Программу для роботов можно писать в RobotStudio (через RAPID редактор) или через FlexPendant. В этой статье рассмотрим именно базу для FlexPendant.
Создаем робота в RobotStudio
Итак, про RobotStudio поговорили, про IRC5 поговорили, о FlexPendant узнали. Теперь мы переходим к практике. Запускаем RobotStudio:
Выбираем Solution with Station and Robot Controller (создать робота, со станцией управления и контроллером). Заполняем необходимые поля, задаем имя для нашего проекта.
Обратите внимание, чтобы в Location не было слишком длинного пути до файлов, иначе RobotStudio не даст создать проект и будет показывать ошибки
Далее переходим к первым настройкам самого робота: RobotWare я выберу 6 версию (RobotWare — ОС для контроллера IRC5). В Robot model выбираем необходимого нам робота и оставляем пустым Customize options, так как дополнительные настройки нам пока не нужны.
Может случиться, что нужно будет установить RobotWare необходимой версии вручную (хотя как правило в новых версиях RobotStudio он уже предустановлен). Добавить необходимую версию RobotWare можно перейдя во вкладку Add-ins и найти в галерее RobotWare, затем выбираем необходимую версию и нажимаем Add

При выборе разных версий (например 7) некоторые роботы пропадут из списка доступных. Это связанно с тем, что не все роботы поддерживают более новый RobotWare. В реальности ABB создает поддержку для новых версий, однако в RobotStudio не успевает быстро появится поддержка
После создания проекта программа может попросить нас выбрать более точную модель робота. Чтобы понять какой робот нам необходим нужно залезть в каталог роботов ABB и посмотреть на техническую документацию.
Робот создан! В данной статьи я не буду рассказывать подробно как ориентироваться в интерфейсе. Можно посмотреть это видео, где показывается как управлять роботом.
Запускаем FlexPendant и управление через пульт
Итак. В RobotStudio мы выбираем вкладку Controller и ищем FlexPendant с изображением нашего пульта. После этого выбираем Virtual FlexPendant.
После чего перед вами в виде отдельного окна появится симуляция пульта FlexPendant, это окно независимо от RobotStudio и можно например переместить на второй монитор, чтобы на первом видеть RobotStudio.
Давайте подвигаем нашего робота. Для этого необходимо в Flexpendant открыть меню (левый верхний угол) и выбрать страницу Jogging.
Перед нами откроется страница для управления режимами, выбором степенями свободы робота и другой информации: нагрузка, рабочий объект, инструмент.
Окно Position показывает нам каждое звено и под каким углом оно в данный момент находится (0 — null позиция, она необходима для калибровки).
Окно Joystick directions показывает нам как нужно сам боковой джойстик повернуть чтобы задействовать необходимое нам звено.
Если мы сейчас попробуем подвигать нашего робота, то у нас ничего не получится. А все потому что, так как этот пульт в точности копирует настоящий нам необходимо переключиться на «ручной режим» управления. Для этого необходимо возле самого джойстика найти маленькое изображение контроллера IRC5 и нажать на него. После чего необходимо выбрать среднее положение «ключа».
Теперь необходимо включить сами сервомоторы. Для этого нажимаем на Enable и Hold To Run. Теперь попробуйте подвигать джойстиком и посмотрите как начинает себя вести робот.
Кликнув на Motion mode: Axis 1 — 3. мы можем выбрать какими степенями свободы мы хотим управлять. Кликнув на ROB_1 (это идентификатор нашего робота в RobotWare) мы можем открыть дополнительное окно настроек нашего робота. Тамже можно настраивать скорость движения, углы, возрастающую скорость и многое другое.
Выбрав самое верхнее изображение нашего робота мы увидим тот же самый Motion mode однако в добавок у нас будет возможность выбора системы координат и рабочего инструмента.
Создаем программу для ABB робота с помощью FlexPendant
Давайте в завершении создадим простую программу с 2 точками.
- Запустить RobotStudio ✔
- Создать робота ✔
- Запустить FlexPendant ✔
- Открыть редактор программы
- Создать программу
- Обучить робота точкам
Точки — это наши пункты в разных системах координат для нашего робота. С помощью указаний этих пунктов и вида движения мы задаем роботу жесткий сценарий по которому он будет следовать. Например следовать дугой от точки А к точки Б, или следовать к точки А остановиться в точки Б и повернуть обратно.
Давайте перейдем к практике:
Находим в меню Program Editor. Именно там мы будем создавать нашу программу.
Если программы до этого не было, то пульт предложит создать новую программу с нуля. Мы соглашаемся с этим и попадаем в редактор. Если вы видите следующий код, то все сделано было правильно.
Ниже код представлен на языке программирования RAPID.
MODULE MainModule PROC main() ENDPROC ENDMODULE
ВАЖНО: Чтобы начать создавать программу пульт должен быть переведен в «ручной режим» работы и при необходимости должны быть включены моторы для передвижения робота
Теперь нам необходимо создать для робота первую точку. Пусть это будет его текущая позиция и назовем её «домашней». Для этого прожимаем на Add Instruction и сбоку появится окно с командами, где мы должны выбрать какую инструкцию добавить. Я добавлю MoveL. MoveL — это прямолинейное движение.
Это значит, что робот к ЭТОЙ точке будет двигаться с помощью команды прямолинейного движения MoveL и никак иначе.
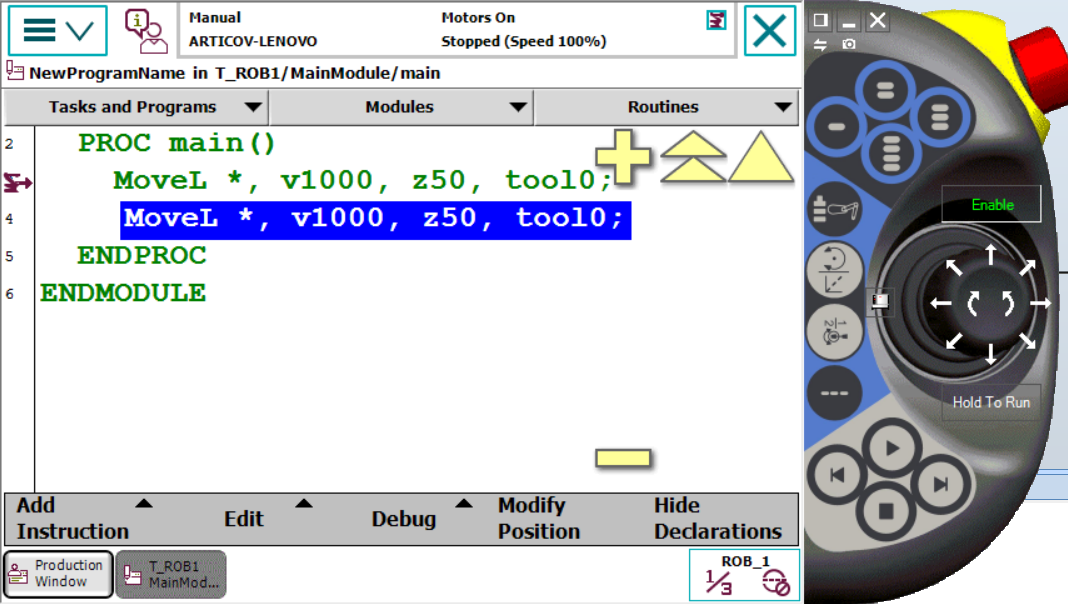
После того как создана первая точка необходимо создать еще одну. Попробуйте подвигать робота с помощью FlexPendant и задайте с помощью инструкции MoveL вторую точку.
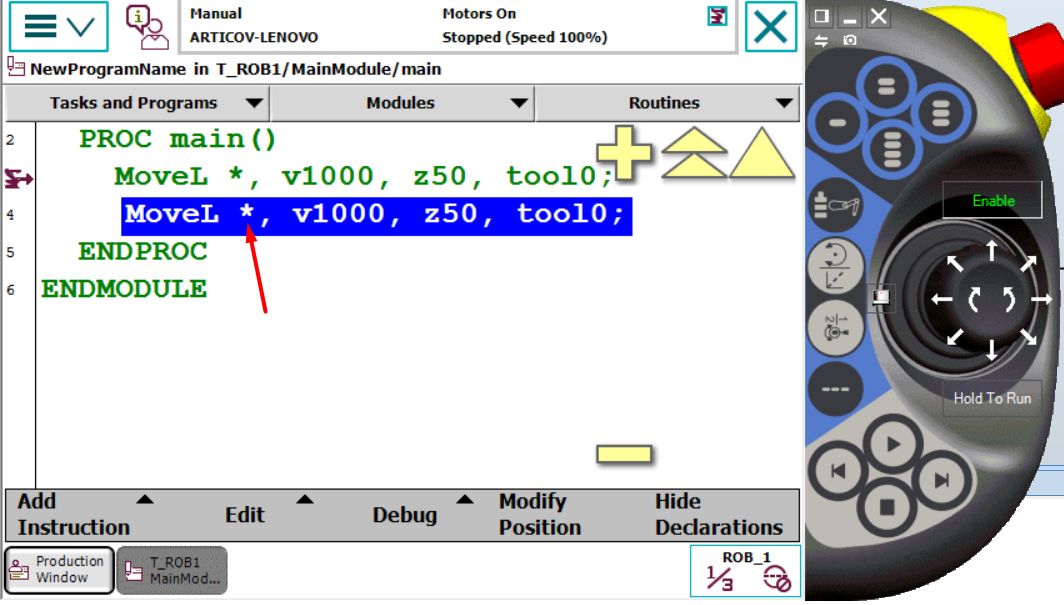
Итак. Две точки созданы и при необходимости эти инструкции можно дополнительно настроить. Нужно кликнуть по символу звездочки и мы попадем в настройки нашей инструкции
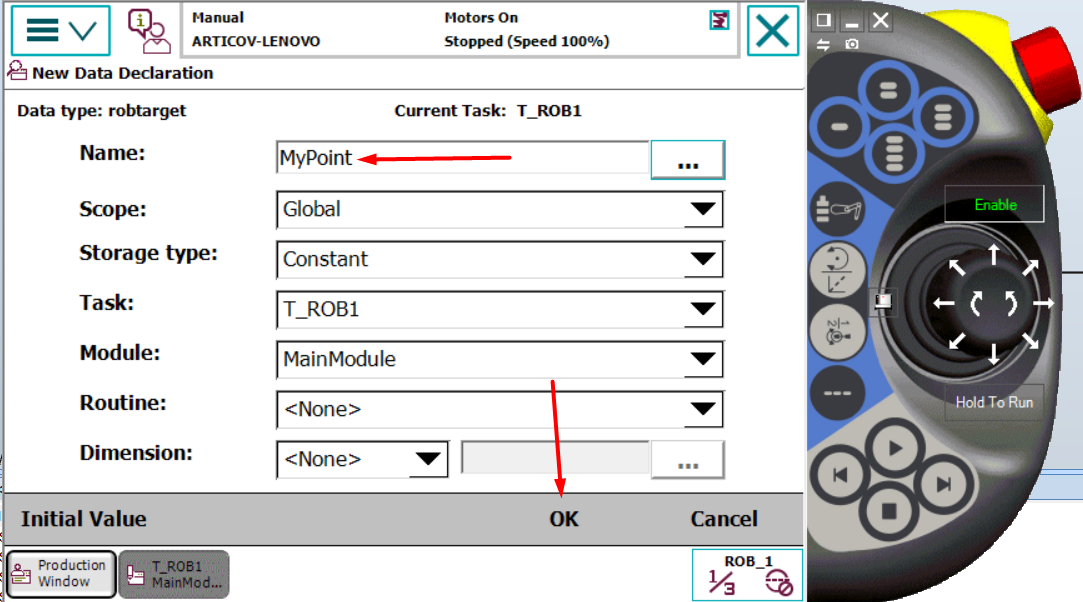
В меню настроек инструкции мы можем добавить «особое имя» для нашей точки, для этого во вкладке Data выбираем функцию new и после чего указываем имя для нашей точки
Советую всегда указывать имя для точек, ибо по дефолту пульт задает им значение Target_N или P_N (где N — номер точки) и потом очень трудно определить какая именно это точка и куда она ведет.
Обратите внимание, что имя должно быть уникальным и больше нигде не повторяться.
Помимо имени точки мы еще можем управлять такими настройками как скорость движения до точки (v1000), разрешение погрешность от точки (z50) и какой рабочий инструмент будет использоваться (tool0). Чтобы изменить эти параметры необходимо на них кликнуть и выбрать новые.
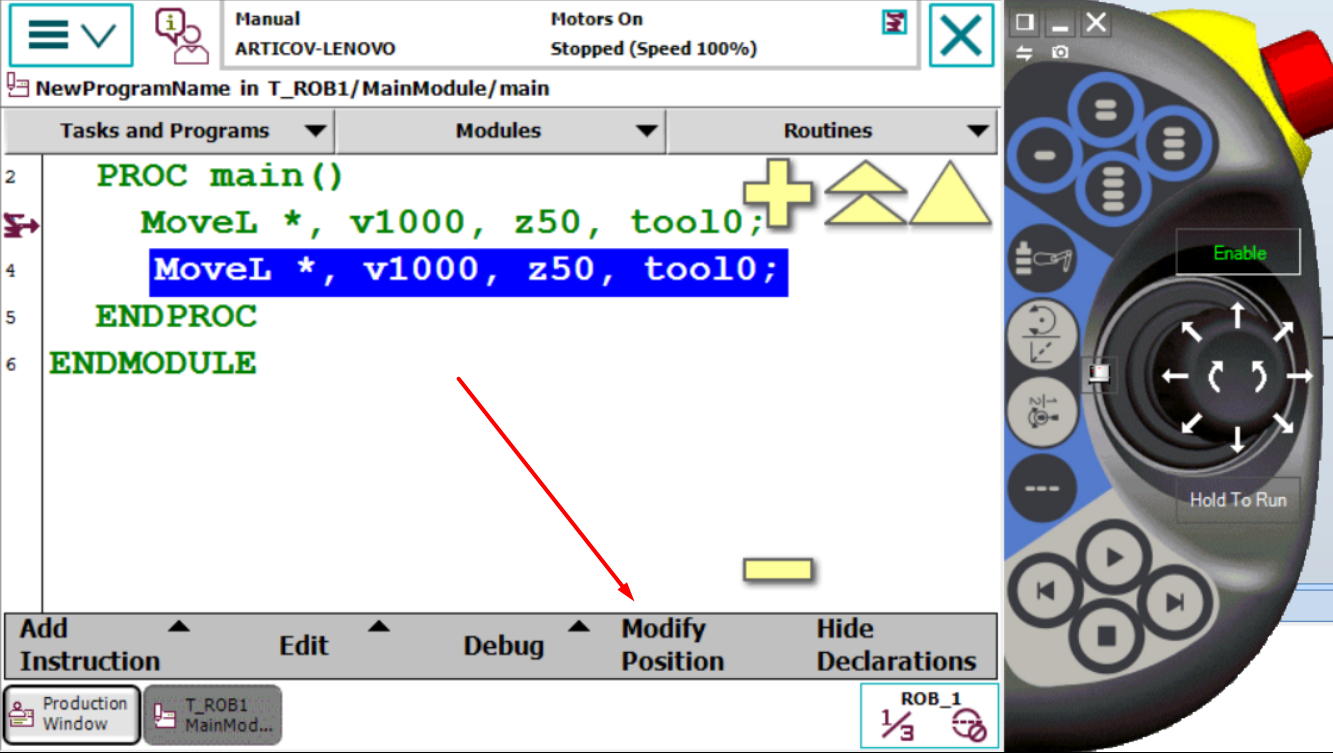
Изменение положения точки
С помощью функции Modify position мы можем изменить положение уже созданной точки. Например создав точку Target_10 мы поняли, что она должна быть на 1 сантиметр левее, то мы сначала двигаем робота левее куда нам необходимо и после чего используем Modify position
Запускаем программу в FlexPendant
Наша простая программа создана и теперь мы хотим проверить как она работает. Для этого мы будем использовать встроенный дебагер. Нажав на кнопку Debug нам открывается меню выбора дебага. Что есть что:
- PP to Main -робот будет выполнять программу от самого начала до самого конца. Весь MODULE
- PP to Routine — робот будет выполнять программу только в определенной области PROC #имя
- PP to Cursor — робот будет выполнять команду, на которую указывает стрелка возле номера строки
Остальные функции я не так часто использую, но все же расскажу о них:
Curstor to PP — переводим стрелку на нужную нам строку
Go to position — робот будет двигаться на определенную позицию (точку)
Check Programm — пульт проверит нашу программу
Call Routine — вызвать PROC
View Value — посмотреть данные (переменные, сигналы и т.д.)
Мы выбираем PP to Routine чтобы проверить как будет работать наша рутина main. После этого на пульте мы можем запустить нашу программу использую следующее управление:
Стрелка play — мы запускаем программу и она будет от начала до конца автоматически исполняться
Стрелка «перемотки» вперед — мы запускаем программу шаг за шагом (например нажав первый раз робот пойдет к точке А и будет ждать дальше разрешения на движение к точке Б)
Стрелка «перемотки» назад обратное стрелки вперед. Мы возвращаемся на шаг назад в программе.
Квадратик — кнопка STOP. Программа завершается и робот уходит в режим ожидания (Stand By)
Дебагер позволяет отслеживать на какой строчке кода находится робот и каким будет его следующим шагом
Всё! Мы научились с помощью FlexPendant и RobotStudio управлять роботами ABB (на самом деле это только базовые навыки правильного «пользования» всем этим. Здесь присутствует очень много функционала, а значит и подводных камней тоже не мало. Здесь я постарался представить представление как работать с этим)
Знаю, возможно этого материала полным полно в Интернете и на ютубе, но здесь я не видел чтобы развивали эту тему. В моей стране не сильно развита робототехника и в «нашем» русском сообществе не с кем поговорить на эту тему, поэтому было бы классно найти единомышленников здесь и узнать что-то новое для себя и поделиться чем-нибудь.
А так, надеюсь что всем вам понравилось и прошу прощения за свою грамматику! Это была моя первая статья и в будущем я хочу больше развивать тему RobotStudio и как там создавать различные решения и как обучать роботов. Жду вашего мнения и впечатлений в комментариях.
Источник: habr.com